Electrónica, Electricidad y Sonido
Sistemas de Control de Maquinas de Corriente Continua
Universidad Técnica Federico Santa Maria
Sede José Miguel Carrera
Electricidad
Trabajo de Maquinas Eléctricas I
Sistemas de Control de Maquinas de Corriente Continua
Curso : 211 - B
Generalidades sobre el motor de corriente Continua
El motor de corriente continua es una maquina que convierte la energía eléctrica en movimiento rotatorio con el fin de producir un trabajo útil .
Hoy día los motores de corriente continua han tomado gran auge por sus características peculiares de admitir regulación de velocidad aun con grandes diferencias de carga lo cual representa un gran logro en la tecnología eléctrica
Tipos de Motores Según su Excitación
Los motores de corriente continua se pueden clasificar en tres por su tipo de excitación ( Serie Derivación o Compound ) .
Motor Serie
* Par de arranque muy elevado
* Muy inestable Tendencia a acelerarse
* Imprescindible reóstato de arranque
* Utilizado en tracción eléctrica
Motor Derivación
* Par de arranque menos elevado que el motor serie
* Muy estable
* Conveniente colocar un reóstato de arranque en serie con bobinado de inducción
* Utilizado en maquinar herramientas por su estabilidad
Motor Compound
Sistema de Arranque do motor de corriente continua
En el momento de arrancar el motor de corriente Continua y en general en todo los tipos de motores la intensidad que absorbe de la red es muy grande por lo que este motor debe tener un sistema de arranque y control de velocidad pare evitar lo anterior
-
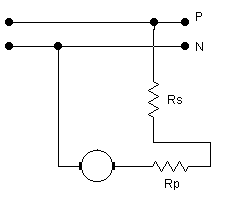
Arranque de Motor de Continua mediante Resistencias colocadas en Serie con el Inductor
Para el arranque del motor lo que se pretende es ir aumentando paulatinamente la corriente por el Inducido para no provocarle daño por la intensidad de la corriente por lo que se dispone su partida como se indica en la figura con un reóstato de arranque el cual se mueve manualmente dentro de un tiempo determinado hasta que el reóstato queda desconectado al sistema quedando la maquina conectada directamente a la red
-
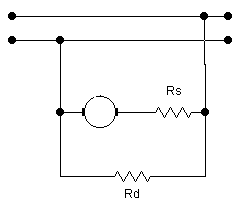
Arranque Automático de Motor de Continua mediante eliminación de Resistencias
Es sistema de arranque con eliminación de resistencias es casi muy parecido al anterior con la diferencia que este puede ser automatizado mediante contactores temporizados
Inversión de giro de motor de corriente continua
Generalmente se obtiene la inversión del sentido de la rotación valiéndose de un interruptor inversor conectado de manera que solamente controle la corriente de la armadura. Invirtiendo la corriente en todo el motor (campo + armadura)no se obtiene ningún cambio porque, invirtiendo al mismo tiempo la corriente en el campo y en la armadura, la rotación continua en el mismo sentido. Refiriéndonos a algunos tipos de sistemas de control para motores que requieres paradas rápidas, puede invertirse la corriente en la armadura, momentáneamente, para producir un par motor inverso que para el motor; a este método de parar bruscamente se le llama “frenar con contracorriente”.
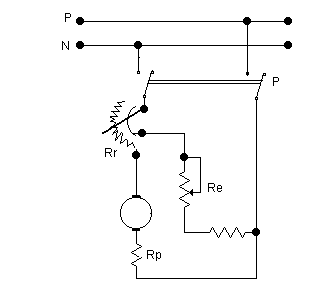
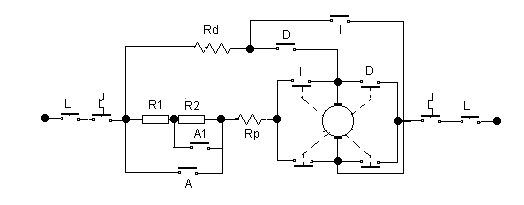
Motor Compound con Reóstato de Arranque de Cuatro terminales con Inversión de Giro
En la practica, la inversión del sentido de rotación se efectúa intercambiando las conexiones de las dos armaduras.
En el circuito anterior, el interruptor con las conexiones para un motor Compound, se usa para invertir el sentido de rotación de la armadura. Lo que se logra invirtiendo la corriente en la armadura, pero no se afecta la corriente en el campo en serie ni en el campo en paralelo. Por tanto, el motor opera como Compound en los dos sentidos, porque los dos circuitos de los campos están funcionando juntos. Seria posible invertir el sentido de la rotación instalando un circuito en el que la corriente de la armadura conservara la misma dirección y se invirtieran las corrientes en los campos. Como habría que invertir al mismo tiempo las conexiones del campo en paralelo y las del campo en serie, resultaría una mayor complicación en las conexiones del control del motor.
-
Motor Serie
-
Motor Derivación
-
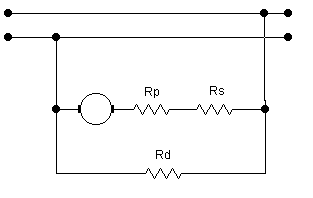
Motor Compound
Diferentes Formas de Arranque de Motor de Continua
-
Mediante Trasformador con Punto Móvil
* Este tipo de conexionado permite un arranque del motor variable manualmente y consta de un transformador con un secundario variable y con alimentación del Inductor independiente variable también mediante un puente rectificador.
-
Mediante SCR e Inversión de Giro

* Este circuito costa de un circuito electrónico con SCR que permite variar la corriente y la tensión con que se alimenta el estator o armadura pudiendo también invertir el sentido de giro del motor mediante los contactores K1 Y K2
-
Mediante transformador Regulable e Inversión de Giro

-
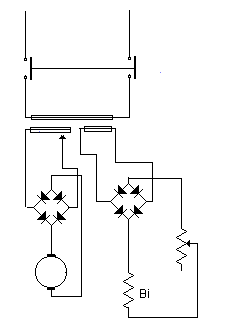
Mediante transformador Amplificador de Frecuencia e Inversión de Giro

* El motor esta alimentado por un equipo rectificador
formado por un amplificador magnético y tiristores gobernados por un potenciómetro
Reóstatos de Arranque Manual en Maquinas Continuas
La conexión repentina de una armadura grande a una línea de fuerza de C.C. causaría la circulación de una corriente anormalmente grande en la línea y en la armadura, ya que, en el momento de arrancar, no existe f.e.m. que limite la corriente. Sin la adición de una resistencia externa, esta elevada corriente sujetaría a un gran esfuerzo a los devanados de la armadura, quemaría escobillas y conmutadores y seria la causa de que la caída de voltaje interfiriera con otras maquinas conectadas a la línea.
Para el arranque suave de los motores grandes se usa un "arrancador de motor". Consiste, simplemente, en una resistencia variable colocada en serie con la armadura. Su objetivo principal es limitar la corriente de la armadura a un valor seguro durante el periodo de arranque y aceleración. En combinación con el reóstato de arranque, existe un dispositivo para desconectar automáticamente el motor, y dejarlo desconectado si falla el voltaje de la línea.
-
Reóstatos de Arranque de tres Terminales
El reóstato de arranque tiene un resistor con derivaciones encerrado en una caja ventilada. Botones de contactos situados en un tablero, montado al frente de la caja están conectados al resistor con derivaciones. Un brazo móvil con un botón de resorte puede moverse sobre los botones de contacto, para dejar fuera de circuito tramos del resistor con derivaciones.
Después que se ha cerrado el interruptor de la línea, se mueve la manivela al primer contacto, A. El campo en paralelo esta ahora conectado a la línea, con toda su potencia. Toda la resistencia de arranque esta en serie con la armadura; esta resistencia, en los métodos aceptados, se calcula para limitar la corriente de arranque en un 150 % de la corriente a plena carga del régimen del motor.
Conforme se acelera el motor, el operador mueve la manivela gradualmente hacia el contacto B, el tiempo necesario depende del que necesite la maquina para adquirir velocidad. En B, la armadura queda conectada directamente a la fuente de voltaje, y la bobina magnética sujetadora, M, sujeta la manivela en la posición de marcha normal. Un muelle, tiende a devolver la manivela a la posición de “desconectado”. Si la corriente en el campo disminuye mucho, el motor se desbocaría si el circuito de la armadura permaneciera desconectado; sin embargo, se evita que esto suceda colocando la bobina sujetadora en serie con el campo en paralelo. Si se reduce la corriente en la bobina sujetadora, suelta la manivela que vuelve a la posición de “desconectado”. Además, si se interrumpe el voltaje en la línea, la bobina sujetadora suelta la manivela, siendo necesario volver a arrancar el motor cuando el voltaje de la línea se restablece
.

(figura 1) Reóstato de Arranque de tres Terminales
La resistencia de arranque esta conectada en serie con el campo en paralelo, cuando el brazo esta conectado, en la posición de funcionamiento normal, al contacto B. Esta resistencia adicional es tan pequeña, cuando se compara con la del campo, que prácticamente no produce efecto en la intensidad de campo ni en la velocidad.

(figura 2) Reóstato Conectado a un Motor Compaund
La figura ilustra las conexiones de un reóstato de arranque manual usado en un motor Compound acumulativo. Nótese que la única diferencia de este circuito y las conexiones para un motor en paralelo es la adición del campo en serie.
Los reóstatos de arranque están proyectados para soportar la corriente de arranque solamente por un corto tiempo, y no para controlar la velocidad del motor. Si se trata de reducir la Velocidad normal sujetando el brazo en un contacto intermedio, es probable que se queme el resistor de arranque.
La caja de arranque de tres terminales no esta hecha para usarse cuando se desean obtener velocidades superiores a la normal usando un reóstato de campo, porque al reducirse la corriente de campo puede soltarse la manivela y desconectar el motor. Para el control del campo, se usa una instalación ligeramente diferente, que se llama caja de arranque de cuatro terminales.
-
Reóstato de Arranque Manual de Cuatro Terminales
Los reóstatos de cuatro terminales para el arranque manual tienen dos funciones:
-
Acelerar un motor a la velocidad de régimen en una dirección de rotación.
-
Limitar la onda de la corriente de arranque de la armadura a un valor seguro.
Sin embargo, este reóstato de arranque puede usarse en combinación con un reóstato del campo, usando el control del campo para obtener velocidades superiores a la normal.

(figura 3) Conexión de un Reóstato de Arranque de Cuatro Terminales
Nótese que la bobina sujetadora no esta conectada en serie con el campo en paralelo, como lo esta en la caja de arranque de tres terminales. En este arranque de cuatro terminales la bobina sujetadora, en serie con un resistor, esta conectada directamente a la fuente de voltaje. La corriente de la bobina sujetadora es independiente de la del campo, pero también sirve para soltar la manivela cuando falta el voltaje. Si el voltaje de la línea baja, la atracción de la bobina sujetadora disminuye, y un resorte devuelve el brazo móvil a la posición de “desconectado”.
Los motores se arrancan en la misma forma con los arrancadores de cuatro terminales que con los de tres. Cuando se desee obtener velocidades superiores a la normal se ajusta el reóstato del campo conectado en serie con el campo en paralelo.
Cuando se va a parar el motor, se suprime toda la resistencia en el reóstato del campo, para que la velocidad del motor vuelva a la normal; luego se abre el interruptor de la línea. Con este procedimiento se tiene la seguridad de que, a la siguiente vez que el motor se arranque, contara con un campo fuerte que, a su vez, producirá un fuerte par de arranque.
Control Manual de Velocidad
Frecuentemente es necesario variar la velocidad de los motores de C.C., las velocidades superiores a la normal se obtienen intercalando una resistencia en el campo en paralelo, mientras que las inferiores pueden obtenerse aumentando la resistencia al circuito de la armadura.
Los controles manuales de la velocidad se pueden definir, como aparatos para acelerar un motor hasta su velocidad normal, con la función adicional de variar la velocidad. No deben confundirse los controles manuales de velocidad con los reóstatos manuales de arranque que, simplemente, aceleran el motor hasta que alcanza su velocidad normal.
-
Controlador de Velocidades Superiores a la Normal
Este aparato de control combina las funciones de reóstato de arranque y de campo. La resistencia de arranque se usa en el circuito de la armadura solamente durante el periodo de arranque, limitando la corriente de la armadura mientras el motor se acelera hasta la velocidad normal. El circuito del control del campo es efectivo solamente después que el motor ha alcanzado su velocidad normal, después de lo cual la intercalación de una resistencia debilita el campo, produciendo una velocidad mayor. El aparato de control señalado tiene tres funciones:
-
Acelerar el motor hasta la velocidad de régimen, reduciendo la resistencia en el circuito de la armadura.
-
Limitar la onda de la corriente en el circuito de la armadura de un valor seguro.
-
Obtener el control en las velocidades superiores a la normal variando la resistencia en serie con el campo en paralelo.
Las dos hileras de contactos se montan en un tablero. La hilera superior de pequeños botones de contacto conecta a las derivaciones de un resistor, que es el reóstato del campo. La hilera inferior de contactos mayores conecta con las derivaciones de un resistor en serie con la armadura. El brazo de control K hace conexión con ambos grupos de contactos.
En la posición de “arranque”, el brazo sirve de desviación del reóstato del campo de manera que se aplica el voltaje completo de la línea al campo en paralelo. Cuando se mueve el brazo K en el sentido de las manecillas del reloj, diminuye la resistencia de arranque conforme el motor se acelera. Cuando el brazo K se aproxima a la posición de funcionamiento normal, el pasador C empuja al brazo B en el sentido contrario de las manecillas del reloj, hasta quedar sujeto por la bobina sujetadora. Para entonces, el motor debe haber alcanzado su velocidad normal.

(figura 4) Aparato de control superiores a la normal (en posición de arranque)
En el croquis anterior, nótese que el brazo B se ha quitado del circuito del campo, de manera que ya no pone en corto circuito al reóstato del campo. En vez de hacer eso, el brazo B ahora pasa la resistencia de arranque, proporcionando un camino directo de la línea de abastecimiento a la armadura.
Si es necesario aumentar la velocidad del motor a algún valor superior al normal, se mueve el brazo K en sentido contrario al de las manecillas del reloj. Esto no afecta ahora la corriente de la armadura, pero si intercala resistencia en el circuito del campo en paralelo. La velocidad del motor aumenta ahora. El brazo K puede dejarse en cualquier posición intermedia para obtener la deseada velocidad superior a la normal.

(figura 5) Control para la Velocidad Superior a la Normal
Cuando se abre el interruptor de la línea, la bobina sujetadora suelta el brazo B que, por un resorte, vuelve a su posición original de “arranque”. Se suelta ahora el pasador C y permite que el brazo K por el empuje de un resorte vuelva a la posición de desconectado.
Este tipo de arranque es generalmente usado para el control de motores Compound.
Reóstatos para el Arranque Manual de los Motores en Serie
Los motores en serie requieren un tipo especial de reóstato para el arranque manual. Estos reóstatos de arranque son los mismos usados en los motores en paralelo y loa Compound. Sin embargo, los sistemas de arranque del motor en serie tienen diferentes conexiones internas y externas.
Hay dos tipos de arrancadores para los motores en serie. Un tipo tiene protección para la falta de voltaje y el otro tiene protección para la falta de carga.
- Sistema de protección para la falta de voltaje, la bobina sujetadora se conecta directamente a la fuente.
Este arrancador se usa para acelerar el motor hasta su velocidad normal. En el caso de que falle el voltaje, la bobina sujetadora no funcionara como electroimán. El resorte devolverá rápidamente el brazo a la posición de desconexión. Lo que protege al motor de los daños que podría causar el bajo voltaje.
- Sistema de protección para el caso de un funcionamiento sin carga.
La bobina sujetadora esta en serie con la armadura. Por lo grande de la corriente que circula en el circuito de la armadura, la bobina sujetadora solo consta de unas cuantas vueltas de alambre grueso. El brazo se mueve lentamente desde la posición de desconectado a la posición de funcionamiento, deteniéndose en cada botón de contacto durante un periodo de uno o dos segundos. El brazo se sostiene contra el empuje del resorte por medio de la bobina sujetadora, conectada en serie con la armadura. Si la corriente que llega al motor baja de un valor determinado, la bobina sujetadora se debilitara y el resorte empujara el brazo a la posición de desconectado. Este es un detalle de protección importante. Se recordara que un motor en serie puede adquirir una peligrosa alta velocidad cuando las cargas son ligeras. Por tanto, si la corriente en el motor baja tanto que la celeridad se convierte en peligrosa, la bobina sujetadora soltara el brazo a la posición de desconectado.
De esta manera se han mostrado maneras de cómo evitar daños al motor.
Conmutadores de Cilindro
Los motores en serie y Compound se utilizan con frecuencia en grúas, elevadores, en herramientas mecánicas y en otras aplicaciones, en las que el motor queda bajo el control directo de un operador. En estas aplicaciones puede ser necesario hacer arranques frecuentes, variaciones de velocidad, paradas e invertir el sentido de rotación. Para estos casos se usan conmutadores de cilindro, que son más robustos que los reóstatos de arranque.
Dentro de la cubierta metálica lleva una serie de contactos montados en un cilindro móvil. Estos contactos están aislados del cilindro y entre sí y son los contactos móviles. Lleva otra serie de contactos, colocados dentro del conmutador, que se llaman contactos estacionarios. Estos contactos estacionarios están dispuestos de manera que hacen contacto con los contactos móviles cuando gira el cilindro. En la parte superior del conmutador de cilindro va una manivela acoplada al eje del cilindro móvil y de los contactos. Esta manivela puede moverse en una y otra dirección controlando la velocidad cuando gira el motor en un sentido o en otro. Una vez ajustado, un dispositivo de rodillo y rueda dentada mantienen fijos al cilindro y los contactos móviles, hasta que el operador hace girar la manivela.
Un conmutador de cilindro dos pasos de resistencias. Para operar hacia delante, el grupo de contactos de la derecha hace contactos con los estacionarios del centro. Para operar en la dirección inversa, los contactos móviles de la izquierda tocan a los estacionarios del centro.

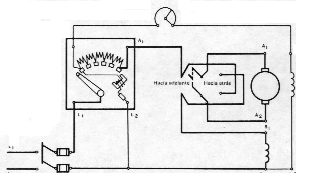
(Figura 6) Diagrama de Conectado a un motor Compound
Se notara que hay tres posiciones para adelante y tres de reversa en las que puede ponerse la manivela. En la primera hacia delante toda la resistencia queda en serie con la armadura. Siguiendo la primera posición hacia delante:
-
Las escobillas móviles a, b, c y d tocan los contactos estacionarios 7, 5, 4 y 3.
-
El recorrido de la corriente es de 7 hacia a, de a hacia b, de b hacia 5, y luego a la terminal de la armadura A1.
-
Después de pasar por el devanado de la armadura a la terminal A2 el recorrido de la corriente es al contacto estacionario 6, y luego al contacto estacionario 4.
-
Del contacto 4 la ruta de la corriente es al contacto c, a d, luego a 3.
-
Luego la ruta sigue a través de todo el resistor de la armadura, a través del campo en serie, y después regresa a la línea.
En la segunda posición, parte de la resistencia se reduce por la conexión de d hacia e. En la tercera posición hacia delante se deja de lado toda la resistencia y queda el circuito de la armadura conectado directamente a la fuente de voltaje.
En la primera posición en reversa se intercala de nuevo toda la resistencia en serie con la armadura. Un estudio de este circuito demostrara que se invierte la corriente en el circuito de la armadura. Sin embargo, el sentido de la corriente en los campos en paralelo y en serie es la misma que cuando la rotación es hacia delante. Ya se demostró antes que, cambiando la dirección de la corriente solo en la armadura se produce un cambio de rotación.
En la segunda posición, parte de la resistencia del circuito se corta. La tercera posición de reversa quita toda la resistencia y conecta directamente el circuito de la armadura al voltaje en la línea. Pueden obtenerse controladores de cilindro mas elaborados, con mas posiciones para mayor control de la velocidad. Sin embargo, todos ellos prácticamente usan esta misma forma de circuito.
Control Automático de los Motores
En los sistemas actuales industriales, cada maquina individual esta operada por su propio motor, y cada vez aumentan mas el uso de botones para arrancar y parar. Es conveniente el uso de equipos de arranque y de control automáticos, operados por botones por la ventaja de reducir el daño producido por equivocaciones humanas. Muchos de estos sistemas automáticos controlan motores de C.C. que se usan por la amplia variación de velocidades y por sus excelentes características en el par motor.
Se usan dos tipos de diagrama en los circuitos de los sistemas automáticos de control: los diagramas esquemáticos y los diagramas pictóricos. En los diagramas esquemáticos se usan símbolos en vez de grabados del equipo, que indican con la mayor claridad posible como se conectan en el circuito las piezas separadas del equipo. Los diagramas esquemáticos se usan en el estudio de los esquemas de control y de las secuencia de las operaciones de los aparatos eléctricos. Los diagramas pictóricos muestran las partes reales del aparato de control en su posición normal en el tablero, con cada alambre dibujado en su posición correcta real. También aparecen las conexiones externas del aparato de control al motor. Los instaladores de alambrado usan este tipo de diagrama al hacer las conexiones en el tablero de control. El diagrama pictórico es confuso y difícil de usar para estudiar la operación del aparato de control; por tanto, es el esquemático el que se usan para aprender la secuencia de las operaciones y también como auxiliar para localizar las averías en el aparato de control. Se usan los símbolos para las bobinas de los relevadores, contactares, unidades de botones de presión, aparatos para sobrecargas y otros componentes.
Los contactores operados por relevadores son una parte importante de cualquier sistema de control automático de motores. Un contactor es un interruptor que se cierra o se abre con la atracción magnética de la bobina del relevador excitado. La bobina del relevador conectada en serie en el circuito se representan normalmente con una línea gruesa. Si la bobina del relevador esta conectada en paralelo, se usa un símbolo dibujado con líneas delgadas. A los contactores que quedan abiertos cuando la bobina no esta excitada se les llama “normalmente abiertos”(N.A.)y se indican con dos líneas cortas paralelas. Los contactores normalmente cerrados (N.C.), que están cerrados cuando la bobina no esta excitada, se representan con una línea inclinada que se dibuja atravesando a las líneas paralelas.
Cuando los contactores interrumpen una corriente grande, se forma un arco muy fuerte que puede quemar la superficie del contactor. Para reducir su quemadura se usa “un soplete electromagnético” en serie con los contactores, que apaga el arco electromagnético.
Los botones de presión son, en realidad, interruptores controlados por resortes. Haciendo presión en un botón de arranque “normalmente abierto” se cierran los contactos del interruptor, y cuando se suelta el botón, el resorte abre el interruptor. El interruptor de “parar” es un interruptor normalmente cerrado; al hacer presión con el dedo se abren los contactos, que se cierran cuando se dejan de apretar.
Estos botones de presión se usan generalmente en combinaciones con una bobina de relevador. Este diagrama representa parte de un circuito elemental de control.
Cuando se aprieta el botón de “arranque”, cerrando los contactos 2-3, y a través de la bobina del relevador para abastecer la línea L2. La corriente en la bobina M del relevador hace contacto en M haciendo que se mantenga cerrada, de manera que cuando se suelta el botón de arranque, abriendo los contactos 2-3, queda todavía un circuito a través del botón 1-2, a través de los contactos M, y a través de la bobina M, a L2. La presión momentánea en el botón de “arranque” excita la bobina del relevador, y los contactos de cierre M conservan excitada la bobina. En los circuitos de control, la bobina M también cierra los otros contactores, así como el contacto de cierre.

(Figura 7) Circuito de Control para Parar y para Arrancar y Circuito de Cierre.
Cuando se aprieta momentáneamente el botón de “parar”, el circuito se corta, la bobina M pierde su atracción magnética, los contactos M se abren, y al soltar el botón de “parar”, cerrando 1-2, no se restablece el circuito. El contacto M y el botón de arranque están abiertos, de manera que no pueden excitarse la bobina M hasta que se cierra otra vez, con el botón de “arranque”, el circuito 2-3.
El Aparato de Control de Fuerza Contra Electromotriz para Motor
Este es un método comúnmente usado para la aceleración automática de un motor de corriente continua. Para operar este aparato de control, se cierra primero el interruptor de la línea. Cuando se oprime el botón de “arranque”, se excita la bobina relevadora M. Este circuito de control permanece excitado, debido a la unión de los contactos de cierre.
Cuando se excita la bobina M en circuito de control, esta cierra también un par de contactores gruesos en el circuito de fuerza. Al cerrar estos contactos se forma un circuito que va de la línea 1 a través del dispositivo de sobrecarga, a través de los contactores M, a través del resistor limitador de corriente en serie con la armadura, y a través de los devanados de la armadura al otro lado de la línea. El campo en paralelo esta conectado directamente al voltaje completo de la línea para asegurar el máximo par de arranque.
Al instante en que se excita el circuito del motor, la fuerza contra electromotriz es cero y prácticamente todo el voltaje de la línea se consume en el resistor limitador de la corriente en serie con la armadura. Al acelerarse la armadura, la f.c.e.m. aumenta en proporción a la velocidad. Al aumentar la f.c.e.m. aumenta la parte de voltaje en las terminales de la armadura y también en la bobina del “relevador acelerador” A, que esta en paralelo con las terminales de la armadura. La bobina relevadora A esta calibrada para que cierre sus contactores cuando se ha aplicado aproximadamente el 80% del voltaje nominal de la línea a la bobina. Cuando el voltaje en las terminales de la armadura llega a este valor predeterminado ( del 80% del voltaje de la línea), la bobina cierra los contactores que ponen en derivación al resistor en serie con la armadura. Ahora la armadura esta conectada directamente al voltaje de la línea y el motor se acelera hasta alcanzar su velocidad de régimen.
Oprimiendo el botón de “parar” se corta el circuito de control y abren ambos grupos de contactores M, desconectando al motor de la línea. Al disminuir la velocidad de la armadura, la bobina ya no puede mantener cerrados sus contactores. Con los contactores abiertos, el resistor limitador de corriente queda otra vez en serie con la armadura. Quedando ahora listo el motor, otra vez, para arrancarlo.
La protección para el arranque en este aparato de control automático de C.C., consiste en fusibles o cortacircuitos calibrados a 150% de la corriente de carga completa del motor. La protección para las sobrecargas las proporcionan la unidad calentadora de sobrecarga, que cuando se recalienta hace que una tira bimetalica abra el contactor en el circuito de control. Esta unidad calentadora esta calibrada a 125% de la corriente de régimen del motor a plena carga.
Si el motor trabaja con sobrecarga durante 45 o 60 segundos, la hace funcionar. La onda de variación de la corriente del arranque no dura lo suficiente (3 o 4 segundos) para calentar el elemento térmico lo suficiente para abrir sus contactores.
-
Arranque Manual con vuelta al reposo por Excitación
La figura 8 representa las partes principales de un dispositivo de arranque con vuelta al reposo por excitación nula para un motor en derivación o compuesto.
Cuando la manivela conductora B se mueve en el sentido del reloj hasta el primer contacto, por medio de un mango aislante no representado, las bobinas de excitación reciben la corriente máxima, mientras que el inducido y todas las resistencias de arranque quedan en serie con los conductores de la red. Cuando se desplazan gradualmente la manivela hasta el contacto final, se suprime la resistencia de arranque del circuito del inducido en seis pasos, pero la corriente If en las bobinas de excitación permanece prácticamente invariable, ya que la resistencia de arranque Rs es pequeña comparada con la resistencia Rf de dicha bobinas.
No ha de moverse demasiado rápidamente la manivela de arranque, pues de lo contrario, la resistencia de arranque quedara suprimida antes que la velocidad ( y, por lo tanto, la fuerza contraelectromotriz )haya tenido tiempo de aumentar y, con ello, de limitar la corriente. Sin embargo, no ha de dejarse la manivela sobre uno de los contactos intermedios porque, para que sea bajo el coste de la resistencia de arranque, se hace pequeña y no puede transportar la corriente de plena carga, durante mas de quince segundos, sin un calentamiento perjudicial.
Si se interrumpe accidentalmente el circuito de excitación del motor, se desexcita el imán soporte M y la manivela de arranque B chocara con el tope de goma a causa del resorte S, abriéndose el circuito del inducido. Si se desconecta el generador, el motor comenzara a pararse lentamente. La corriente de excitación será ahora proporcionada por la Eg del motor y, por lo tanto, es proporcional a la velocidad. Aproximadamente, a la mitad de la velocidad el imán M será lo suficientemente débil para liberar la manivela B. Es esencial que dicha manivela vuelva automáticamente a la posición de abierta siempre que se interrumpa el suministro de energía, ya que de otro modo no abría resistencia de arranque en serie con el inducido cuando se conectase de nuevo el generador. La corriente de arranque seria entonces de veinte veces aproximadamente la corriente a plena carga, lo que inevitablemente expondría el equipo a desgaste y rotura innecesarias.

(Figura 8)
-
Arranque manual con Vuelta al Reposo por Tensión Nula
Cuando se ha de regular la velocidad de un motor en derivación dentro de un margen amplio mediante la regulación de la excitación, llega ha ser prácticamente imposible diseñar el imán M de la figura 8. Para conseguir un funcionamiento satisfactorio en todo el margen de la corriente de excitación. Por lo tanto, se conecta directamente a la red el imán M, en serie con una resistencia R, según se representa en la figura 9. Esto proporciona una protección contra la interrupción del suministro de energía, pero no contra la interrupción accidental del circuito de excitación. Sin embargo, una interrupción de esta clase es extremadamente rara si el motor se ha instalado de manera adecuada.

(Figura 9)
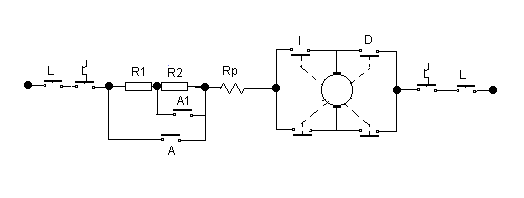
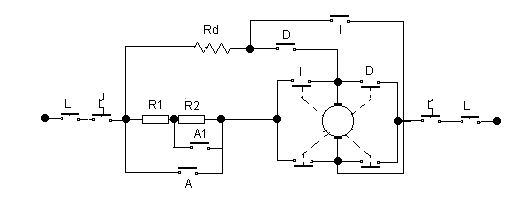
Dispositivos de Arranque con Regulación de Velocidad para Motores en Derivación y Compuesto
Existen dispositivos de arranque en los cuales el equipo de regulación de velocidad esta asociado al de puesta en marcha formado una solo unidad de control. El dispositivo mostrado en la figura 10 proporciona regulación de velocidad por resistencia de excitación y de inducido. Se diferencia del dispositivo de arranque sencillo de la figura 9 en los dos puntos siguientes:
1..Su elemento de resistencia de inducido deberá ser capaz de transportar continuamente la corriente a plena carga del motor y, por lo tanto deberá tener una superficie de refrigeración mayor.
2..El equipo de tensión nula deberá modificar para que la manivela pueda permanecer en posiciones intermedias comprendidas entre las de “parada ” y de “toda velocidad ”.
Esta ultima modificación se consigue por medio de la rueda de trinquete W, que es movida en el sentido de las agujas de un reloj por la manivela B, y en sentido contrario por un resorte en espiral (no representado). Mientras estas excitado el disyuntor de tensión nula M, la rueda de trinquete no puede girar en sentido contrario a las agujas del reloj, por impedirlo la palanca H, y por ello no puede llevar la manivela B a la de parada. Sin embargo, si cae la tensión de la línea, se desexcita el disyuntor M, y un resorte empuja la palanca H hacia la derecha, permitiendo que la rueda de trinque vuelva a la posición, arrastrando a la manivela B.
El cable de conexión que une el primer contacto del inducido con él ultimo contacto de excitación no transporta normalmente corriente. Su objeto es proteger contra la posibilidad que el circuito de excitación quede abierto por un contacto deficiente en la manivela y los contactos de excitación.
No es conveniente parar un motor llevando la manivela a la posición de parada, ya que en este caso la manivela debe interrumpir la corriente del inducido, lo que produce la quemadura del primer contacto. Debe instalarse un interruptor de línea y utilizarlo para abrir el circuito que llega al motor. Entonces el dispositivo de arranque volverá automáticamente a la posición de parada.
El tipo de contacto deslizante del dispositivo de arranque esta expuesto a ocasionar perturbaciones, porque se produzca arco entre los contactos cuando se utilizan para motores de potencia superior a 30cv y115v, o 50cv y 230 a 500v. Para motores mayores han de utilizarse interruptores como los de la 16-12. En muchos casos los interruptores son de tipo de contacto y el control se hace automáticamente.

(Figura 10)
Combinadores de Tambor
Los combinadores de tambor son especialmente adecuados para motores de velocidad regulable, que tienen que arrancar, detenerse y cambiar de velocidad con frecuencia, porque las distintas operaciones de conmutación se realizan fácilmente mediante el movimiento de una sola manivela, teniendo lugar en el orden adecuado. En las figuras 11 se representa un tipo sencillo de Combinador de tambor. Consiste en un cilindro metálico o tambor A, aislado del eje central, al cual esta acoplada la manivela de accionamiento, B. Los segmentos de contacto, de cobre, a,b,c,d y e, que tienen forma de arcos de circulo, están sujetos a este tambor. Estos segmentos de cobres tienen solamente contacto eléctricos con el tambor y con nada más. Las tomas de la resistencia de regulación del inducido se conectan a las lengüetas fijas o escobillas, f, g, h j y k, que están aisladas entre sí y del soporte fijo sobre el cual están montadas. El tambor lleva también una escobilla de contacto, m, que desliza sobre los contactos fijos del reóstato de campo, montado sobre el disco C fijo. Esta escobilla no esta aislada del tambor y, por, lo tanto, esta en contacto eléctrico con todos los segmentos de cobre.
La acción de un Combinador de este tipo se puede comprender fácilmente con la figura 11, que representa un tambor de Combinador desarrollado sobre un plano. Las líneas de punto y raya verticales numeradas de 1 a 13 indican las posiciones sucesivas del tambor cuando gira.

(Figura 11)
Combinador para motores serie
Los motores series se utilizan mucho para grúas, montacargas y excavadoras eléctrica; los combinadores empleados en ellos deben estar dispuestos para invertir el sentido de giro al hacerlo las conexiones de las bobinas de excitación o del arrollamiento del inducido. Los combinadores de tambor se usan frecuentemente para esta clase de servicios, así como combinadores planos. Un Combinador plano tiene sus contactos fijos dispuestos en uno o dos círculos, en un mismo plano, disponiendo de dos a cuatro brazos, que giran simultáneamente pero independientemente eléctricamente.
Dispositivo automáticos de arranque
La tendencia en el funcionamiento de la maquina eléctrica es construir los dispositivos de puesta en marcha y combinadores de modo que funcionen automáticamente. Esto no solo protege la maquina de averías por falta de cuidado o impericia de los operarios, sino que proporciona también un control mas uniforme y rápido.
El numero de variaciones y modificaciones de los distintos tipos de control automático o semiautomático es muy grande y aumenta rápidamente. Es fácil suponer que no excite ninguna serié de operaciones, por complicadas que sean, que no puedan realizarse por un Combinador eléctrico automático, con tal que el coste no sea prohibitivo. Muchas subcentrales eléctricas modernas son completamente automáticas. Un Combinador de tambor principal, con relés asociados, pone en marcha la maquina es necesario, la regula y la detiene de nuevo, sin intervención de nadie, y, si algo marcha mal, para la instalación y envía un mensaje pidiendo ayuda a la oficina central.
No hay limite prácticamente para el numero de operaciones de conmutación que es posible realizar mediante una vuelta de un solo Combinador de tambor, puesto que cave aumentar su longitud y su diámetro para ofrecer espacios a cuantos contactos se desee.
Se expondrá dos tipos de dispositivos automáticos de arranque para motores de corriente continua;
1.-El Combinador magnético de corriente continua con regulación de tiempo definida.
2.-El Combinador con regulación de tiempo determinada por el valor de la corriente en el inducido.
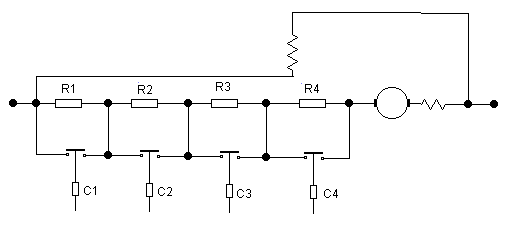
Ambos tipos de combinadores suprimen gradualmente la resistencia de arranque cerrando interruptores, como se indica en la figura 12. Primero se sierra el interruptor A, y después los B, C y D, con un intervalo de tiempo adecuado entre cierres sucesivos.

(Figura 12)
Combinador Magnético con Regulación definida de Tiempo
En la figura 13 esta representado un Combinador principal característico con regulación definida de tiempo. Cuando se excita el solenoide S por el cierre del interruptor de botón P, ejerce una atracción sobre el balancín M, que llevan los cuatros interruptores de contacto A,B,C y D. El balancín se mueve hacia adelante
Con una velocidad definida, que queda fijada por el mecanismo de relojería Q, al cual esta engranado el eje N del balancín. Los espacios que quedan entre los contactos de los interruptores A,B,C y D aumentan progresivamente de A a D. Cuando el balancín se mueve hacia adelante, cierra primero el interruptor A, pero su movimiento no se detiene, porque los interruptores solo quedan mantenidos contra el balancín por los resortes en espiral g, que comienzan a comprimirse tan pronto hace contacto los interruptores.
Así, pues, este Combinador principal se reduce a un mecanismo que cierra sucesivamente cuatros interruptores con un intervalo definido de tiempo entre dos cierres consecutivos. Este intervalo de tiempo puede graduarse, entre limites suficientemente amplios, variando el periodo del péndulo en el mecanismo de escape Q.
Para abrir los interruptores se interrumpe el circuito del solenoide y el balancín es impulsado hacia atrás por la acción de un resorte que quedo comprimido cuando el balancín fue atraído hacia adelante.
Para arrancar el motor se cierra el interruptor K (Fig. 14 ) y se aprieta el pulsador de arranque. Esto completa el circuito del solenoide S, que cierra un tras otro los contactores A,B,C y D del Combinador, suprimiendo así gradualmente la resistencia de arranque. Cuando se eleva el balancín M, acciona el interruptor auxiliar Y, que cortocircuita el pulsador de arranque, de modo que al dejar de oprimir este botón no se interrumpe la corriente en el solenoide S, al mismo tiempo se intercala una resistencia en serie con dicho solenoide para reducir la corriente que circula por el al mínimo preciso, economizando energía. La corriente necesaria para mantener serrado el interruptor principal es considerablemente menor que la requerida para cerrarlo.
El relé térmico constituye una protección contra sobrecarga, ya que interrumpe la corriente en el solenoide S cuando se calienta demasiado. Para detener el motor se aprieta el botón de parada. Este interrumpe la corriente del solenoide S y el Combinador principal se abre rápidamente.
Las conexiones indicadas en la figura 14 se utilizan para motores hasta de 10cv a 110v y hasta 20cv a220v. Las corrientes más intensas de motores mayores no pueden manejarse mediante los contactos del Combinador principal. Se dispone entonces interruptores de contacto independientes y, el Combinador principal abre y cierra sus circuitos de accionamiento como se indica en la figura 15. Parra arrancar el motor, se cierra el interruptor K y se oprime el pulsador de arranque. Esto complementa a la vez los circuitos de los solenoides del interruptor de contactos L de la línea y de Combinador principal S. El interruptor L de la línea se cierra inmediatamente, arrancando de este modo el motor con toda la resistencia de arranque en serie. Después de un intervalo de tiempo adecuado, el contacto a del Combinador principal se cierra, completando el circuito del solenoide de accionamiento del contacto A, que cierra y cortocircuita una parte de la resistencia de arranque. Los contactos B y C se cierran al mismo tiempo, suprimiendo así toda la resistencia de arranque.
Para detener el motor se aprieta el pulsador de parada, interrumpiendo así las corrientes que accionan el interruptor de contactos L de la línea y el Combinador principal S. Estos interruptores, que fueron cerrados venciendo la acción de resortes, se abren, por tanto, rápidamente, seguidos de los contactos C,B y A, cuando quedan interrumpidas sus corrientes de retención. Con este tipo de Combinador no hay limite para el tamaño de motor que puede ponerse en marcha sirviéndose de el.


(Figura 13) (Figura 14)

(Figura 15)
Combinador magnético de fuerza contraelectromotriz
El Combinador magnético con regulación definida de tiempo no es muy apropiado para el arranque de motores en los que el par de arranque que se precisa varia dentro de amplios limites. Cuando al arrancar, la carga es anormalmente grande, se precisa mas tiempo para conseguir la aceleración entre pasos. Para obtener las curvas ideales de corriente cada Combinador debe esperar hasta que la corriente ha caído a 1,25 veces la corriente a plena carga, antes de suprimir la sección siguiente de la resistencia del inducido. Cuando el motor aumenta su velocidad su fuerza contraelectromotriz Eg aumenta y reduce la corriente del inducido, y para cada valor de la corriente del inducido hay una fuerza contraelectromotriz determinada y única. El aumento de la fuerza contraelectromotriz se puede utilizar para disparar los dispositivos de contacto en vez de disminuir la corriente. En la practica se utilizan los dos métodos.
La figura 16 representa el diagrama de conexiones de un Combinador magnético de fuerza contraelectromotriz para un motor grande en derivación o compuesto. Para poner en marcha el motor se cierra el interruptor de red S y se pulsa el botón “arranque”. Este cierra el circuito a través del arrollamiento del rele M, que cierra sus tres contactos M1, M2 y M3, arrancando el motor con R1,R2 y R3 en serie con el arrollamiento del inducido. Cuando la fuerza contraelectromotriz del motor alcanza el 50% de la tensión de la red, la tensión en la bobina A es lo suficientemente grande para que funcione, cerrando el contacto A y cortocircuitando a R1. Cuando la fuerza contra electromotriz alcanza el 75% de la tensión de la red, se actúa la bobina B, cerrando el contacto B1 y abriendo el B2. Al cerrar B1, obliga al contacto numero 2 a cortocircuitar a R1 y R2. Al abrir B2, se desexcita la bobina A, permitiendo que se abra el contacto numero 1. Cuando la fuerza contraelectromotriz alcanza el 87,5% de la tensión de la red, se acciona la bobina C, cerrando el contacto C1 y abriendo el C2. Esto completa el funcionamiento del arranque. Las bobinas M y C permanecen excitadas mientras el motor gira. El contacto M2 no se precisa para el arranque, pero es útil para la parada, porque si se suprime es necesario mantener el botón de parada apretado en cuanto el motor se halle por debajo del 50%, de la velocidad, ya que de otro modo la fuerza contraelectromotriz del motor puede accionar a la bobina M y poner en marcha el motor de nuevo. El contacto M3 asegura que R1, R2 y R3 se introduce en el circuito tan pronto como se aprieta el botón de parada, de manera que si el operador intenta arrancar de nuevo el motor antes de que su velocidad haya descendido por debajo del 50% no se conectara a la red con la resistencia de arranque suprimida.

(Figura 16)
14
Descargar
| Enviado por: | Victor |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.