Matemáticas
Geometría analítica
GEOMETRÍA ANALÍTICA
Línea recta
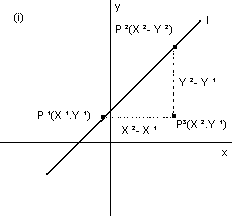
Si l es una recta no paralela al eje Y, y si P ¹ (X ¹, Y ¹) y P ² (X ², Y ²) son puntos diferentes en l, entonces la pendiente o inclinación M de l esta dada por
Y ²- X ¹
M = —————
X ²- X ¹
Si l es paralela al eje, entonces la pendiente no esta definida.
Al numerador Y ²-Y ¹ en la formula para M, en ocasiones se le llama desnivel de P ¹ a P ². Mide el cambio vertical de dirección al avanzar de P ¹ a P ², y puede ser positivo, negativo o cero. El denominador X ² - X ¹ se llama corrimiento de P ¹ a P ². Mide el cambio de dirección horizontal al recorrer de P ¹ a P ². El corrimiento puede ser positivo o negativo, pero nunca cero, porque l no es paralela al eje Y. usando esta terminología,
Desnivel de P ¹ a P ².
Pendiente de l = ————————————
Corrimiento de P ¹ a P ².
Cuando se determina la pendiente o inclinación de una recta l es irrelevante cual punto se denominara P ¹, y cual, P ²,
Y ²- Y ¹ Y ¹ - Y ²
————— = ——————
X ²- X ¹ X ¹ - X ²
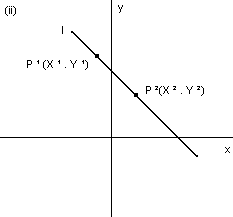
En consecuencia, puede suponerse que los puntos se denominan de modo que X ¹ < X ², en este caso, X ²- X ¹ > 0, y por consiguiente, la pendiente es positiva, negativa o cero, dependiendo de si Y ² > Y ¹, Y ² < Y ¹ o bien Y ² = Y ¹. La pendiente de la recta mostrada en la grafica (i) es positiva, en tanto es negativa la pendiente de la recta mostrada en (ii) de la grafica.
Una recta horizontal es una recta paralela al eje X. obsérvese que la recta es horizontal si y solo si su inclinación vale 0. Una recta vertical es un recta paralela al eje Y. la inclinación de una recta vertical es indefinida.
La parábola
Una parábola es el conjunto de todos los puntos de un plano que son equilibrantes de un punto fijo F llamado foco y de una recta fija l denominada directriz situados en el plano.
Ejemplo.
Hallar el foco y la directriz de la parábola que tiene por ecuación Y ² = - 6X y trazar su grafica.
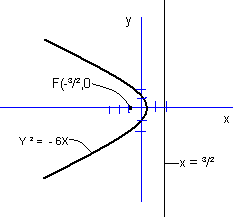
En consecuencia el foco y la ecuación de la directriz están dados por F (³/², 0) y X = ³/², respectivamente.
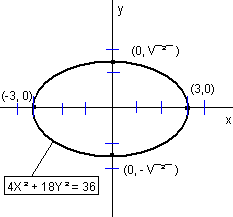
La elipse
Una elipse es el conjunto de todos los puntos en un plano, tales que la suma de sus distancias a dos puntos fijos en el plano (los focos) es constante.
Ejemplo.
Representar la siguiente ecuación gráficamente. 4X ² + 18Y ² = 36
Para obtener la forma canónica del teorema tenemos que dividir ambos lados de la ecuación dada entre 36 y simplificar. Se obtiene así:
X ² Y ²
¯¯¯ + ¯¯¯ = 1
9 2
La cual esta en la forma citada con a ² = 9 y b = 2. Así, a = 3, b = V¯²¯; por consiguiente, los extremos del eje mayor son (± 3, 0) y los del eje menor (0, ±V¯² ¯
Como c ² = a ² - b ² = 9 - 2 = 7 o bien V¯7¯.
La hipérbole
La definición de la hipérbole es similar a la de la elipse. La única diferencia es que en lugar de considerar la suma de las distancias a dos puntos fijos, se toma la diferencia.
Una hipérbole es el Conjunto de todos los puntos en un punto plano, tales que la diferencia de sus distancias a dos puntos fijos del plano llamados focos, es una constante positiva.
Ejemplo.
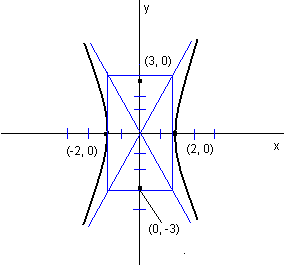
Analizar y trazar la grafica de la ecuación 9X ² - 4Y ² = 36
Dividimos ambos lados entre 36, tenemos:
X ² Y ²
¯¯¯¯ ¯ ¯¯¯¯ = 1
-
9
Que esta en la forma canónica establecida en el teorema con a ² = 4 y b ² = 9; es decir, a = 2 y b = 3. Los vértices (± 2, 0) y los puntos extremos (0, ± 3) del eje conjugado determinan un rectángulo, cuyas diagonales (prolongadas) dan las asíntotas. La grafica o las ecuaciones y = ± (b/a) X permiten encontrar las ecuaciones de las asíntotas: y = ± ³/² X. como c ² = a ² + b ² = 4 + 9 = 13, los focos son (±V¯13, 0).
En el ejercicio anterior se muestra que para las hipérboles no siempre se cumple que a < b, como en el caso de las elipses se puede tener a < b, a > b o bien a = b.
La circunferencia
Si C (h, k) es un punto del plano coordenado, entonces se puede definir a la circunfencia con centro en C y radio r > 0 como el conjunto de todos los puntos que distan r unidades de C. como la grafica un punto P (x, y) se encuentra sobre la circunferencia si y solo si d (C, P) = r, o por la formula de la distancia, si y solo si
V¯¯¯¯¯¯¯¯¯¯¯¯
(x - h)² + (y - k)² = r.
la ecuación equivalente se llama ecuación de una circunferencia con radio r y centro (h, k) o simplemente, ecuación de una circunferencia.
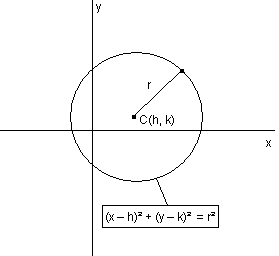
Ecuación de la circunferencia (x - h) ² + (y - k) ² = r ², r > 0.
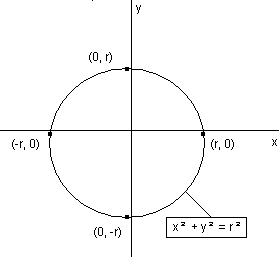
Si h =0 y k = 0. Se reduce a que x ² + y ² = r ², que es la ecuación de una circunferencia de radio r y con centro en el origen. Si r = 1, la grafica es un circulo unitario
Ejemplo.
Obtener la ecuación de la circunferencia con centro C (-2, 3) y que pasa poe el punto D (4, 5).
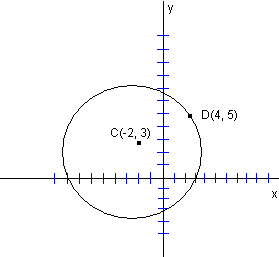
Como D esta sobre la curva, el radio r es d (C, D). la formula de la distancia da
V¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯¯ V ¯¯¯¯¯¯¯ V¯¯¯¯
r = (-2 - 4) ² + (3 - 5) ² = 36 + 4 = 40.
Al hacer h = -2 y k = 3 en la ecuación de la circunferencia, obtenemos
(X + 2) ² + (y - 3) ² = 40 o sea X ² + y ² + 4x - 6y - 27 = 0.
Elevado al cuadrado los binomios de la ecuación de la circunferencia y simplificando obtenemos una ecuación de la forma en donde a, b y c son números reales. Recíprocamente, si se parte de la ecuación anterior, se pueden completar los cuadrados en X Y y para obtener una expresión de la forma (x - h) ² + (y - k) ² = d.
Rotación de ejes
Formulas para la rotación de ejes si se giran los ejes X y Y un Angulo w alrededor del origen 0, entonces las coordenadas (X, Y) y (X, y) de un punto P en los dos sistemas están relacionadas como sigue:
X = X cos w - Y sen w, Y = X sen w + Y cos w.
X = X cos w + Y sen w, Y = - X sen w + Y cos w.
Ejemplo
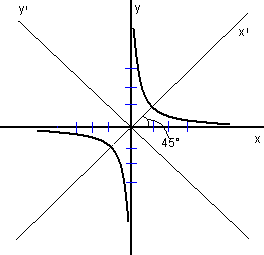
Se tiene la grafica de la ecuación XY = 1, o equivalente, Y = 1 / X. si se giran 45° los ejes coordenados, encuentre la ecuación de la grafica en el nuevo sistema coordenado X¹ Y¹.
Si hacemos w = 45° en (i) de las formulas de rotación de ejes, obtenemos
X = X¹ (V¯2¯) - Y¹ (V¯2¯) = (V¯2¯) (X¹ - Y¹)
¯¯¯¯ ¯¯¯¯ ¯¯¯¯
2 2 2
Y = X¹ (V¯2¯) + Y¹ (V¯2¯) = (V¯2¯) (X¹ +Y¹)
¯¯¯¯ ¯¯¯¯ ¯¯¯¯
2 2 2
Sustituyendo estas expresiones de X y Y en la ecuación XY = 1,
(V¯2¯) (X¹ - Y¹) (V¯2¯) = (V¯2¯) (X¹ +Y¹) = 1.
¯¯¯¯ ¯¯¯¯ ¯¯¯¯
2 2 2
Esta ecuación se reduce a
(X¹)² (Y¹)²
¯¯¯¯ ¯ ¯¯¯¯ = 1.
-
2
Que es la ecuación de una hipérbola con vértices (±V¯2¯, 0) sobre el eje X¹. Nótese que en el nuevo sistema las ecuaciones de las asíntotas de la hipérbola son Y¹ = ± X¹. Estas corresponden a los ejes originales X y Y.
Introducción
La geometría plana incluye el estudio de figuras como lo son las rectas, círculos y triángulos que están en un plano.
En la geometría analítica se estudian las figuras geométricas planas introduciendo un sistema coordenado y usando ecuaciones y formulas de varios tipos.
Objetivos
-
reconocer las distintas cónicas que existen.
-
Saber que aunque se estudiaron hace miles de años todavía son herramientas importantes para las investigaciones.
-
Conocer cuando usar ecuaciones y formulas de los diferentes tipos de cónicas que existen
Conclusiones
Con este trabajo se puede concluir que las cónicas son muy importantes tanto en la vida diaria como en el campo investigativo ya que son herramientas de la geometría analítica y con ella podemos crear muchas cosas por ejemplo en el campo de la arquitectura podemos diseñar fachadas de edificios con dichas figuras o dichas cónicas el como es el caso de la construcción de un puente que puede tener la forma perfecta de una parábola, diseñado por un ingeniero civil.
Además saber que dada una ecuación de cualquiera de los tipos de las cónicas existentes se puede hallar su grafica y recíprocamente dada una grafica se puede hallar su ecuación.
Bibliografía
-
Earl W. Swokowski.
Álgebra y trigonometría con geometría analítica.
Descargar
| Enviado por: | RANM |
| Idioma: | castellano |
| País: | Colombia |
Todos los derechos reservados.