Informática
Realidad Virtual
INDICE
1.Introducción.
2.Dispositivos de interacción en la realidad virtual.
- Percepción visual.
-
El casco de realidad.
-
Percepción auditiva.
-
Sistemas de actuación.
-
Otros dispositivos.
-
Configuración del sistema de realidad virtual.
3.Tecnicas de interacción en un medio virtual.
-
Dirección del movimiento.
-
Determinación de la velocidad del movimiento.
-
Selección de objetos.
-
Manipulación de la posición y orientación de un objeto.
-
Características deseables de un menú virtual.
-
Cómo situar un menú frente al usuario.
-
Problemas de implementación.
4.Propuesta de dispositivos de interacción ARNF-82.
-
Sensor para el mando de desplazamiento (N_S_E_O).
5.Creacción y navegación en mundos virtuales: VRML.
-
Internet y www.
-
Navegando por la web en tres dimensiones.
-
Imágenes, películas y sonidos.
-
Animación de objetos autónomos.
-
Interacción con mundos VRML.
6.Conclusión.
Realidad virtual
1.Introducción
La rápida curva de crecimiento, tanto del software como del hardware, que han sufrido los ordenadores en los últimos años, se debe en gran medida al perfeccionamiento de unos interfaces hombre-máquina cada vez más amigables, que han permitido una popularización de estas máquinas y una facilidad de uso, otros impensables. La realidad virtual (Virtual Reality - VR) se conforma como el nuevo modo de interacción entre el hombre y los ordenadores, con el objetivo de simular la presencia de las personas en mundos virtuales sintetizados o remotos.
El término Realidad Virtual no es nuevo, aunque en 1983 Krueger acuñará la Realidad Artificial. En 1965 Ivan Sutherland introdujo las claves sobre la inmersión en mundos simulados, así como una completa descripción de los periféricos de entrada/salida, base de las investigaciones actuales en este campo. Se desarrollaron diversos proyectos en el MIT y la NASA (VIVED y VIEW) con el objetivo de conseguir la interacción de una persona en un mundo tridimensional, pero no trascendieron al gran público. No fue hasta mediados de 1986 cuando VPL y Autodesk ofrecieron sistemas de realidad virtual en ferias de informática, basados en monitores situados en un casco, para interactuar con mundos virtuales. A partir de entonces la progresión tanto de los mundos como de los periféricos ha sido vertiginosa, y se atreve ahora con nuevas áreas de aplicación, como la medicina, la química o la visualización científica en general.
En los próximos capítulos se trataran los diferentes aspectos de la realidad virtual, desde el punto de vista de los interfaces hombre máquina, los dispositivos que existen en la actualidad, los que están por venir, las distintas tecnologías de simulación de ambiente y un ejemplo concreto: el
VRML.
2. Dispositivos de interacción en la realidad virtual
Los humanos interaccionan con el mundo que les rodea gracias a los cinco sentidos. La conjunción de informaciones transmitidas por los órganos sensitivos forman el sentimiento de existencia en un mundo concreto. La realidad virtual se propone simular cada uno de los datos que se pueden recoger gracias a los sentidos, para sumergirse en un mundo tridimensional en el que se pueda ver,oír, sentir, pero también interactuar, de modo que se puedan manipular objetos, o que cada acto tenga consecuencias precisas. A continuación se detalla cómo la realidad virtual simula la percepción de cada sentido, y cuales son los sistemas de simulación sobre los que se está trabajando en la actualidad.
Percepción visual
Uno de los sentidos más importantes en el ser humano es el de la vista. El poder ver el mundo que nos rodea permite conocerlo de manera mucho más fidedigna que si hubiera que basarse en otros sentidos. La caracterìstica fundamental de este sentido es que dispone de dos fuentes de visión:cada uno de los ojos provee al cerebro una imagen distinta a la del otro. Dado que esas fuentes están separadas unos centímetros, cuando el cerebro “junta” las dos imágenes, el resultado es una imagen tridimensional con la que se puede percibir la cercanía o lejanía de un objeto.
El poder reproducir imágenes tridimensionalmente ha sido un reto tecnológico que no se ha superado satisfactoriamente hasta la llegada de la informática y sus aplicaciones. Previamente a la aparición de la realidad virtual, se han desarrollado distintos métodos, con el objetivo básico de poder ver una imagen en 3D, orientados sobre todo a la industria cinematográfica. Estos métodos se basan fundamente en la proyección de una imagen previamente tratada sobre un soporte convencional en 2D,y en el uso de unas gafas que modifiquen la imagen de manera diferente en cada ojo. Es el caso de aquellas con un cristal rojo y otro verde: un ojo filtraba las imágenes en verde y el otro rojo, de modo que se podían sobreponer dichas imágenes en un dibujo, por ejemplo, para ver una imagen tridimensional. Pero este sistema se ha perfeccionado y ha dado lugar a gafas con cristales polarizados de distinta manera, que si se utilizan con las imágenes adecuadas,, pueden ofrecer una imagen tridimensional prácticamente real. 'Este método se utiliza, por ejemplo, en la proyección de películas en formato IMAX de gran tamaño. Pero la visión en 3D ha aparecido también en el mundo del entretenimiento (a buen seguro gran usuario de los sistemas de realidad virtual) con el desarrollo de algunas consolas de videojuegos que ofrecen la posibilidad gracias a gafas especiales, de ver en una pantalla de televisión una imagen tridimensional.
EI casco de realidad
Este complejo dispositivo es la base de la realidad virtual de hoy en día y de los próximos años, hasta que se desarrollen los sistemas holográficos u otros sistemas a venir Está compuesto de dos pequeñas pantallas independientes (generalmente de cristal liquido) que proyectan imágenes sobre cada ojo, de modo a garantizar la visión binocular. Delante de cada pantalla se sitúa una lente, con el objetivo de ensanchar el campo de visión, debiendo el ordenador distorsionar previamente las imágenes para compensar este efecto.
Otra característica de este dispositivo es que tiene la capacidad de transmitir al ordenador, en tiempo real, los movimientos de la cabeza y, en algunos casos, de los ojos. Esto permite modifica de modo instantáneo la imagen en proyectada ante el usuario según se mueva la cabeza, y da un efecto de movimiento dentro del mundo virtual. Estos dispositivos de posicionarniento se basan en cuatro métodos fundamentales
- Sistemas mecánicos: se utilizaron en los inicios de la realidad virtual, pero su limitado campo de trabajo y su inercia ante movimientos reducen la posible utilización de este tipo de dispositivo.
- Sistemas acústicos: obtienen la información sobre el posicionamiento a partir de estimaciones basadas en el efecto Doppler y, la velocidad del sonido en el aire. Son poco precisos, dado la variedad de condiciones que se pueden presentar que modifiquen la velocidad del sonido (densidad, temperatura...)
- Sistemas ópticos: La mayoría de estos sistemas han fracasado comercialmente, pese a ser atractivos por ser independientes de las condiciones ambientales y tener un campo de actuación bastante amplio. Wrang et al (1990)propusiron un sistema basado en tres camaras en el casco y un entorno con un entramado de LEDs infrarrojosque parpadean de manera controlada, y que sirven para calcular la posición y la orientación del casco. Este método permite la presencia de varios individuos en el mismo espacio físico, sin interferencia alguna. El principal problema que presenta es el elevado peso del casco y la necesidad de tener una habitación preparada con LEDs.
- Sistemas magnéticos: Han sido los de mayor éxito comercial; aunque no son perfectos, permiten una interacción satisfactoria. Una fuente produce un campo magnético de baja frecuencia detectado por un sensor. Los principales problemas de estos sistemas radican en que son sensibles a los materiales conductores presentes en el espacio, que tienen un campo de trabajo limitado (1m3 aprox.) y una frecuencia de refresco no muy alta (16hz aprox.9). Pese a todo resulta suficiente para la mayoría de las aplicaciones de realidad virtual.
Percepción auditiva
El segundo sentido más importante en el ser humano es el auditivo. Proporciona información sobre cosas que se pueden ver por encontrarse fuera del campo visual, o ratifica la percepción visual cuando ésta no es fiable. Del mismo modo que la visión binocular permite tener una imágen más real que la monocular, con una percepción de profundidad, el sonido estereofónico da una noción de la localización de una fuente de sonido. En una serie de sonidos grabados (una canción por ejemplo) es sencillo manejar cual será el balance de cierta fuente de sonido e incluso su profundidad. Un disco de música clásica grabado con calidad y escuchado en sistemas de alta fidelidad permite distinguir la situación de cada uno de los instrumentos de la orquesta.
La cuestión se complica cuando se trata de generar un sonido producido por una fuente virtual, por ejemplo un perro virtual ladrando. Disponemos de la posición con respecto al animal virtual así como de una grabación del ladrido de un perro de tipo monoaural. ¿Cómo se representa en un sistema estereofónico la posición de esa fuente de sonido?. EI sonido de un coche virtual que viene por la izquierda se oirá en el oído izquierdo antes incluso de verlo, y a medida que pasa por delante del usuario, se producirá un balance del sonido que acompañe a la imagen. Esta asociación objeto-sonido que parece tan intuitiva requiere un procesador en tiempo real que sintetiza el sonido (digital) según la posición de las fuentes.
La reproducción del sonido en estéreo es algo que no supone ningún problema técnico, puesto que hoy en día se utilizan auriculares con todo. Tipo de fuentes de sonido (reproductores de CD, cassette, cinta...). EI casco de realidad virtual puede llevar incorporados unos auriculares que lleven a cabo esta tarea, aunque en algunos casos se puedan usar miniauriculares que van dentro del oído.
Sistemas de actuación
Hasta ahora el sujeto se limita a ver y a oír, se encuentra en el mundo como paciente del mismo, sin poder actuar de modo consciente sobre él. Los sistemas actuales de actuación sobre el medio se basan en una detección de los movimientos de la mano, extremidad con la que somos capaces de expresar un máximo número de movimientos. Los dispositivos de detección de la mano deben ser sensibles a la posición de los ángulos de flexión de los dedos y a la posición y orientación del puño. En un principio se usaron métodos basados en imágenes de video para realizar los cálculos, pero éstos eran lentos y el resultado era poco preciso.
Actualmente, el dispositivo mas común es del tipo del VPL Data Glove basado en un guante de nylon con sensores ópticos instalados a lo largo de los dedos. Cada sensor está formado por un trozo de cable de fibra óptica con un LED en uno de los extremos y un fototransistor en el otro. Cuando se dobla el cable el receptor recibe menos luz proveniente del LED con lo que se puede saber con cierta seguridad, después de haber realizado la correspondiente calibración, el ángulo de inclinación del dedo respecto a la palma de la mano. Cada dedo lleva incorporados (los sensores que permiten conocer el movimiento de las dos articulaciones más cercanas a la mano (siendo la tercera casi insignificante), y existe la posibilidad de instalar cinco sensores adicionales para tener constancia de la apertura o separación de los dedos. Pero la característica definitiva de este guante es el dispositivo utilizado para determinar la posición y orientación de la mano, del mismo tipo que en el casco de realidad virtual (magnético), que permite un conocimiento definitivo de la situación y por parte del sistema.
Otro modo de actuación poco conocido en la realidad virtual es el del reconocimiento de voz Un micrófono situado en el casco de realidad virtual puede recibir ordenes o transmitir mensajes de interacción con otros objetos o personajes del mundo virtual.
Otros dispositivos
EI Data Glove y los cascos de realidad virtual no son los únicos dispositivos que se han desarrollado en los últimos años. Con el objetivo de una comercialización exitosa movida por las aplicaciones lúdicas en el mundo de los PCs se han itentado desarrollar ratones 3D con posicionadores magnéticos, que no han conseguido un resultado satisfactorio, dado que se trata de dispositivos de posicionamiento absoluto, es decir, hay que mover la mano agarrándolo para desplazarlo en la dirección deseada.
Una alternativa a este tipo de sistemas es la ofrecida por Spatial Systems con su Spaceball, una plataforma elevada para apoyar la mano en cuyo centro se encuentra una esfera que se puede girar o empujar y que también es sensible a la fuerza con la que se realiza la acción. con lo que se pueden mover objetos o cámaras virtuales en espacios 3D.
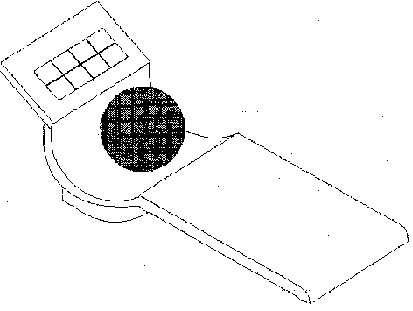
En el esquema adjunto se muestra el Spaceball. Se pueden observar la esfera de orieintación (que tambien se puede mover en sentido arriba-abajo) y algunos botones auxiliares de control. La amplía plataforma sive para apoyar el brazo correctamente. Este sistema proporciona 8 grados de libertad. lo que mejora sensiblemente las capacidades de un ratón convencional.
Configuración del sistema de realidad virtual
A continuación se representa un esquema de un sistema de realidad virtual, basado en un ordenador y periféricos con sus controladores respectivos propuesto por Furness III en 1987.
3. Técnicas de interacción en un medio virtual
La realidad virtual se ha conformado como una de las formas más naturales de comunicación entre el hombre y las máquinas, donde se puede ver, oír, tocar con las manos, como se haría en el mundo real. Se pueden considerar tres sistemas de interacción en un mundo virtual: movimiento, selección y manipulación. Como derivado de éstos, también aparecen los menús virtuales. A continuación se describirá cada uno de estos sistemas y, para la mayoría de ellos, se verán tres modos de abordar el problema de su implementación: por interacción directa del usuario, por controles reales y por controles virtuales.
Una de las características de los mundos reales, es que el usuario puede moverse por ellos a su antojo, luego es de imaginar que en los mundos virtuales, tal característica se mantenga. El hecho de desplazarse en un mundo virtual como resultante de un movimiento equivalente en el mundo real es una de las acciones que resultan más intuitivas, ya que no requiere ninguna concentración especial. Sin embargo hay una componente limitadora importante: el campo de acción será siempre limitado (la mayoría de las veces 1 ó 2m2) cuando en teoría un mundo virtual es prácticamente infinito. Puede ser que el movimiento que el usuario realice en el espacio real, no se transmita con el mismo factor de escala al mundo virtual, de modo que, para explorar mundos muy grandes (galaxias) o muy pequeños (átomos) se utilicen movimientos relativos, pero el problema del espacio subsiste.
Para moverse en un mundo virtual se necesitan dos parámetros fundamentales: la velocidad y la dirección. En la vida cotidiana también se necesitan de estas variables, pero simplemente resulta intuitivo y no se piensa sí hay que coger una rotonda por la derecha o por la izquierda.
Dirección del movimiento
Como ya se ha dicho el dispositivo de reconocimiento ideal para moverse por un mundo virtual sería aquel que permitiera moverse de la misma manera en el real. Pero como este tipo de dispositivos son poco fiables hay algunos sistemas alternativos para que el control de la dirección sea efectivo aunque menos intuitivo. A continuación se detallarán estas alternativas de modo a ver cuál de ellas podría ser la mas conveniente para dirigirse en un mundo virtual.
- Movimiento dirigido por la mano.
La mano es la que con una interpretación directa de su movimiento, permite al usuario dirigirse en el mundo virtual, surgen dos interpretaciones de este método al comprobar que, según se tome la dirección del dedo o la que describiría una línea trazada entre los ojos y la punta del dedo el resultado varía considerablemente (sobre todo cuanto mas cerca y mas abajo se encuentre el dedo con respecto a los ojos) EI utilizar la dirección del dedo (modo de puntero) resulta más cómodo para los usuarios expertos, porque se abstraen del hecho de que se encuentran en un mundo virtual, sin embargo el modo de líneas cruzadas resulta más intuitivo para los novatos A la hora de la implementación, el modo de puntero resulta más sencillo ya que sólo tiene que analizar la posición del dedo, mientras que en el modo de líneas cruzadas se ha de calcular la línea imaginaria entre los ojos y la punta del dedo, para prolongarla y encontrar el punto deseado. En la figura adjunta se específica la diferencia entre ambos modos de funcionamiento.
- Movimiento dirigido por la mirada.
Aunque hay sistemas de reconocimiento de las pupilas, para saber dónde se está mirando, solo se considera el movimiento de la cabeza, por razones de
estabilidad. El usuario se desplazará con la dirección en que se está mirando, lo cual resulta bastante cómodo para los usuarios novatos. Tiene como mayor pega el que no se puede mirar hacia los lados sin girar, lo cual seria engorroso si se quisiera conducir un coche virtual y mirar por la ventanilla a la vez. Este inconveniente se vería agravado si se tomara como referencia la mirada, ya que los ojos suelen recorrer, aún inconscientemente, el campo de visión de un modo aleatorio, lo que podría ser pernicioso para los intereses del usuario.
Otra posibilidad es la propuesta por Chung en 1994, el modo orbital, que consiste en situar el objeto a ver siempre delante del usuario. de modo que los movimientos de cabeza suponen una rotación sobre el mismo, como se explica en el esquema adjunto
- Movimiento dirigido por controles reales.
También se pueden utilizar dispositivos reales convencionales como ratones, joysticks, trackballs con los que se determina la dirección del movimiento. Son fáciles de incorporar a una aplicación y tienen la ventaja (le que son mucho mas precisos que los demás sistemas de movimiento y además de ser convenientes pan ciertos usos de simulación de la conducción/pilotaje (p e. un coche, un avión o una bicicleta de montaña).
- Movimiento dirigido por controles virtuales.
Este tipo de sistemas en que los controles también pertenecen al mundo virtual, tienen la ventaja de ofrecer una gran flexibilidad, pero su interacción se ve mermada por el hecho de que se pierde la conciencia del sentido del tacto sobre los mismos.
- Movimiento dirigido por objetos.
A veces el usuario no es el responsable de su movimiento, por ejemplo viajando en un tren, y se ve dirigido por una fuerza ajena a él. Se denominan vehículos autónomos a aquellos en los que el usuario no puede decidir sobre su dirección, pero además existen otros dos tipos de objetos de este tipo: atrayentes y repelentes. Que producen en el usuario un irremediable efecto de atracción (p.e. para simular la gravedad de un planeta) o de repulsión (p.e. la onda expansiva de una bomba).
Estos dos tipos de objeto pueden ser autónomos o definidos por el usuario, de modo que se pueda producir un desplazamiento deseado hacia un punto.
- Movimiento dirigido por objetivos.
En este tipo de sistemas, existen ciertos objetos que, bien situados en forma, de iconos, objetos o listas de objetos, actúan como objetivos a los que el usuario se dirigirá automáticamente una vez seleccionados. Requiere el uso de mapas virtuales o, en su defecto, de menús.
Determinación de la veIocidad de movimiento
Además de la dirección de movimiento, el usuario debe transmitir al sistema la velocidad con la que desea moverse. Los sistemas de determinación de la velocidad más comunes tienen que ver, en parte, con los sistemas de direccionamiento. Se destacan los siguientes.
- Velocidad constante
El usuario siempre se mueve a la misma velocidad por el mundo virtual, aunque existe la posibilidad de que ésta varíe según las dimensiones del entorno. Resulta la manera más simple de determinar la velocidad, pero se presenta inadecuada para la mayoría de las aplicaciones.
- Aceleración constante
Algunos mundos de gran extensión, requieren poder centrarse en detalles pequeños. Puede ser conveniente determinar una velocidad que crezca de manera exponencial, de modo que al principio se vaya despacio, para conseguir mayor velocidad al cabo del tiempo. El parámetro clave en la puesta a punto de este tipo de sistemas es el factor de aceleración. Un factor bajo no permitirá desplazarse con rapidez hacia elementos situados en la otra parte del mundo. un factor alto dificultará el centrarse en detalles u objetos pequeños.
- Velocidad controlada por la mano
Otra posibilidad para el control de velocidad es el utilizar la mano, provista del consiguiente dataglove. Se puede considerar que cuanto más lejos se lleva la mano, más deprisa se desplaza el usuario, de modo que pueda tener una aproximación bastante fiel del movimento real de la mano Como en el caso de la aceleración constante, este tipo de control requiere un factor de aceleración, que puede ser de tipo lineal o exponencial de modo a determinar Cuanto se acelera avanzando la mano una distancia concreta. Uno de sus inconveinentes es el tener que permanecer con el brazo levantado durante el tiempo en el que se desee desplazarse. sentido cansado para recorrer largas distancias.
Una alternativa a este método Consiste en situar tres zonas de acción a lo largo del intervalo de alcance del brazo: el primer tramo supondría una deceleración, el tramo siguiente una velocidad constante y el más alejado una aceleración. Este sistema provee un amplio espectro dinámico al usuario, pero resulta complicado para personas inexperimentadas.
- Controles físicos.
Se pueden utilizar dispositivos externos para el control de la velocidad, como el teclado y la voz o algunos que resultan conocidos en el mundo real y que se aplican al mundo virtual, como pedales de aceleración, puños de motocicleta o los pedales de una bicicleta.
SeIección de objetos
Principalmente existen dos técnicas para la selección de objetos u objetivos por un lado la local, que requiere “tocar” el objeto en el mundo virtual y realizar algún gesto, pronunciar alguna palabra clave o apretar algún botón para validar la selección. Por otra parte se encuentra el método de selección a distancia que permite apuntar con el dedo a un objeto para después validarlo. Se utilizarán las mismas técnicas de los punteros de movimiento. También se pueden utilizar sistemas de selección comandados por la mirada, del mismo modo que se ha descrito anteriormente.
Un aspecto nuevo que ya a aparecido tímidamente a través de este texto es que pueda existir un reconocimiento por voz de los comandos del usuario. Si cada objeto seleccionable posee un nombre, podemos acceder a él, simplemente, nombrándolo. Tiene el inconveniente de que requiere aprenderse los nombres de los objetos y que los sistemas de reconocimiento de voz no son todavía fiables al 100%.
ManipuIación de la posición y orientación de un objeto
Cuando se está trabajando con objetos que requieren una manipulación en el mundo virtual, es muy importante poder cambiar algunas variables propias, como son la posición, la orientación o el centro de rotación. Este tipo de interacciones son muy importantes, por ejemplo, para desplazar cántaras virtuales, o visualizar objetos diseñados. Como piezas. Aveces los objetos sobre los que se quiere actuar existen en el mundo real, con lo que su inieracción con el modelo se debe parecer a la real. Existen tres métodos (le interacción con un objeto, similares a las utilizadas en otro tipo de Interacciones: A través de un dataglove el usuario podrá arrastrar o rotar un objeto como si lo cogiera pudiendo modificar las escalas de acción dependiendo del tamaño del mismo.
También se pueden utilizar controles físicos como joysticks botones de desplazamiento o diales que se muestran muy precisos a la hora de posicionar objetos.
Por último, es posible realizar el control sobre el objeto a través de controles de tipo virtual en botones, barras o menús.
Características deseables de un menú virtual
En una primera aproximación los menús tendrán una única dimensión de modo que el usuario pueda moverse de opción en opción realizando una operación simple. Una posible implementación es la que propone Liang en l994 con un menú rotatorio, de modo que la rotación de la mano seleccione la herramienta que se quiere usar. Es importante reseñar que para la selección de una herramienta sólo se tienen en cuenta el movimiento de la mano que interesa, desechando los demás, lo que limita la posibilidad de interacción con el menú, pero que resulta adecuado para este propósito.
Sin embargo, cuando el número de opciones es tan grande que no resulta adecuada su presentación frente al usuario en una sola dimensión, parece conveniente el visualizar el menú en dos dimensiones. Aquí si existe una analogía con los programas convencionales, puesto que se puede presentar en forma de menús desplegables, barras de desplazamiento o, simplemente, una matriz de botones. Esto requiere el utilizar técnicas de selección, para interactuar con el menú como se haría, por ejemplo, con un ratón.
EI uso de menús en tres dimensiones resulta demasiado complicado en comparación a las pocas ventajas que ofrecen, por lo que no se suelen utilizar, ni siquiera en interfaces no virtuales.
Cómo situar el menú frente al usuario
Este problema, que provoca la necesidad de pasar de menús 1 D a menús 2-D, se plantea cada vez que tenemos que mostrar el menú. Existen varias posibilidades de visualización del menú según como se trate el objeto que representa.
Si se representa el menú como un objeto más flotando en el mundo virtual, se podrá desplazar hacia una zona que el usuario no esté visualizando a acceder a él directamente. Tiene el inconveniente de que se puede perder el menú en cualquier sitio, y volver al punto donde se encuentre puede resultar complicado.
Otra posibilidad consiste en tener el menú siempre delante, cualquiera que sea el movimiento de la cabeza, pero tiene el inconveniente de que utiliza permanentemente parte del campo de visión del usuario, con lo que se reduce el mismo.
Como solución híbrida de las dos anteriores, se podría plantear un sistema de menú flotante con alguna característica especial, de modo que con algún movimiento de la mano o un comando por voz (p.e. "menú"), el menú aparezca ente el usuario para poder interactuar con él, pero que conserve la característica de objeto en el mundo virtual, que se puede desplazar o perder de vista si se desea.
Problemas de implementación
Esta teoría resulta difícil de implementar debido a la poca calidad de los displays en los cascos de inmersión y a la poca precisión de los sistemas de selección que dificultan la visión de las distintas opciones y su posterior validación. Se deberían utilizar métodos que corrigieran los defectos de señalización debidos al usuario o al propio sistema, o incluir dispositivos de selección específicos para los menús. En cualquier caso el desarrollo de los componentes hardware limita sensiblemente este tipo de interacciones, puesto que la teoría de menús, sobre todo en 2-D, es ampliamente conocida y utilizada en interfaces de programas de ordenador.
4.Propuesta de dispositivos de interacción. ARNF-82
En principio, la realidad virtual no se entiende sin un dataglove y un casco de realidad virtual unidos a una potente estación de trabajo. Sin embargo, este tipo de sistemas están lejos de ofrecerse al gran público como medio habitual de interacción del usuario con la máquina, debido en gran parte al coste económico de estos dispositivos. Pero existe otra variante de realidad virtual mucho más simplificada que la anterior, en la que se 'encapsúla' el mundo, para poder visualizarlo con el monitor del ordenador y actuar sobre él gracias al teclado o el ratón. Se pierde la visión binocular y la interacción directa con la mano, pero se gana en la simplicidad del diseño del software, que fundamentalmente se convierte en un renderízador en tiempo real, que requiere muchos menos recursos y que puede ser utilizado en ordenadores personales. La capacidad de sonido estereofónico no tiene por qué perderse, por ser ampliamente utilizada por los sistemas multimedia actuales. Uno de estos tipos de encapsulamiento que se utiliza para crear mundos virtuales por los que se puede interactuar por vía web, el VRML, se tratará más adelante. Si bien el dispositivo aquí propuesto se ha desarrollo con VRML en mente, lo cierto es que puede servir para navegar por cualquier mundo virtual.
El ARNF-82 se asemeja, en cuanto a funcionalidad, al Spaceball, sin embargo éste último está más enfocado a la manipulación de objetos. El dispositivo propuesto optimiza la navegación por mundos virtuales como la que se realiza en VRML y ofrece algunas características adicionales al Spaceball.
La navegación por mundos virtuales permite una cantidad de grados de movimiento que en implementaciones con casco de inmersión VR y dataglove resultan muy numerosas, pero cuando se utilizan controles físicos éstas se tienen que ver necesariamente reducidas. ARNF-82 propone 8 grados de libertad de movimiento que resultan suficientes para la navegación corriente en un mundo virtual.
Por una parte, se necesita disponer de un movimiento en el piano horizontal hacia delante (N) hacia atrás (S) y hacia los lados (E y O) pero con la mirada siempre adelante. Estos cuatro movimientos (sobre todo los dos primeros) serán los fundamentales para moverse por el mundo virtual, permitiendo acercarse o alejarse de un objeto o desplazarse lateralmente.
Otros dos movimientos imprescindibles más incluso que los laterales son la rotación, sobre sí mismo hacia la derecha (D) y hacia la izquierda (I). Será conveniente para el sistema el que se puedan utilizar la rotación y el desplazamiento simultáneamente lo cual supone una limitación en el diseño que habrá que tener en cuenta.
Con estos seis movimientos se podría navegar por cualquier mundo virtual plano, como se haría en el real Sin embargo ARNF-82 dispone de dos grados de libertad más que permiten elevarse (Ar) o descender (Ab) sobre un punto. También convendrá el que la elevación se pueda combinar con la rotación y el desplazamiento para multiplicar los grados de libertad por combinación de movimientos. Esta característica permitiría desplazarse en los mundos virtuales volando con una avioneta o votando como un fantasma. La figura adjunta muestra los ocho grados de libertad que ofrece el sistema.
Si bien en un principio se ha pensado en la posibilidad de simular el movimiento de la cabeza de modo que el usuario sin variar su posición pueda ver lo que pasa a su alrededor esta opción requiere cuatro grados de libertad más (girar la cabeza a derecha e izquierda y mirar arriba y abajo) esto podría ser difícil de controlar por parte del usuario. Dado que el sistema utiliza una rotación sobre sí mismo parece redundante el incluir la rotación de la cabeza; si el usuario desea observar los que pasa a su derecha tendrá que rotar su cuerpo hacia la derecha. Esta limitación no se traduce en una merma considerable de la capacidad de acción del usuario puesto la mayoría de las veces que gira la cabeza para localizar un objeto es para dirigirse a él rotando todo el cuerpo después. Sin embargo parece razonable el poder dirigir la mirada hacia arriba y hacía abajo para poder por ejemplo ver los frescos del techo de una catedral virtual, o la inscripción de una lápida en el suelo, que de otro modo no seria posible contemplar. También seria deseable que el movimiento de la cabeza a derecha e izquierda pudiera realizarse al mismo tiempo que los a anteriores.
Una vez definidos cuántos y cuáles serán los grados de libertad de movimiento v las interacciones que puede haber entre ellos es hora de ver como se sitúan los dispositivos de control de cada movimiento y que tipo de dispositivos se usan. Se destacan las siguientes especificaciones.
- Solo se podrá utilizar un grado de desplazamiento a la vez, por lo que es conveniente situarlos en cruz.
- Sólo se podrá utilizar un grado de rotación a la vez, luego se situaran opuestos.
- Sólo se podía utilizar un grado de elevación a la vez, también opuestos.
- Solo se podrá utilizar un grado de dirección de la mirada a la vez, opuestos.
- Estos cuatro grupos de grados de desplazamiento podrán ser utilizados independientemente, dando la combinación de alguno de ellos un nuevo grado de libertad, diferente a los 8 básicos y 2 de mirada (45 grados de movimitento y 135 de movimiento y mirada).
Para la implementación del grado de desplazamiento parece conveniente utilizar una palanca de tipo joystick con sólo cuatro movimientos (en cruz). La razón de no permitir la combinación de dos movimientos a la vez (p.c. arriba-izquierda) se debe a que el resto de dispositivos de movimiento irán montados en la palanca, lo que puede ocasionar acciones no deseadas. Por otra parte, según la definición de estos grados de desplazamiento, no parece muy usual desplazarse en diagonal mirando al frente; resulta más intuitivo girar y avanzar.
Sobre la palanca, que se asirá con la mano, se sitúa un dispositivo que permite controlar, tanto el grado de giro como el de elevación. Consiste en un cilindro cuyo eje es concéntrico al de la palanca, que se puede rotar a derecha e izquierda, y que también permite moverlo hacia arriba y hacia abajo. En la parte superior de este
cilindro se situara el mando de control de dirección de la mirada de modo que se pueda accionar con el pulgar. Sobre estas líneas se muestran un esquema del ARNF-82 con los 8 grados de movimiento y el mando de dirección de la mirada (orientado como si se usara la mano derecha).
Sensor para el mando de desplazamiento (N_S_E_O)
Como ya se ha indicado anteriormente, el sensor que detecta el movimiento de la palanca y que permite el movimiento del usuario, se asemeja bastante al de un joystick, pero en el que solo se podrán realizar movimientos fundamentales (no en diagonal). Los mandos deberán tener una velocidad diferente según cuánto se desplace la palanca de modo que, a medida que el usuario haga presión sobre la misma, la velocidad será mayor. Un número conveniente de velocidades posibles sería de 6 para cada uno de los grados de movimiento pudiéndose configurar el intervalo de los valores previamente.
Este dispositivo irá montado sobre la palanca anteriormente descrita,y debería tener en cuenta la rotación y el sentido de la misma. La forma exterior no debería ser completamente cilíndrica, sino ligeramente anatómica, para adaptarse a la forma de cualquiera de las dos manos. Se podrá mover únicamente a derecha e izquierda evitando todo juego en sentido vertical. También es conveniente que sólo se pueda girar un cuarto de vuelta, puesto que resulta dificil girar la mano hacia fuera (hacia la derecha los diestros y hacia la izquierda los zurdos), y que el mando vuelva a su situación inicial automáticamente (retorno), sin que ello suponga acción alguna sobre el sistema. Es necesario que se endurezca el paso del estado de reposo al de acción para evitar manipulaciones indeseadas. EI movimiento del mando significará, al igual que en el apartado anterior, una velocidad mayor o menor, pero simplemente se ofrecerán dos velocidades dé rotacion distintas según se gire mas o menos de un octavo de vuelta. En la figura superior la velocidad del primer tramo (1) será menor que la de el segundo (2), de modo que si se sobrepasa el octavo de vuelta, se pasa a la velocidad superior. La razón fundamental del hecho de poner solo dos velocidades es que en un giro sobre uno mismo no se necesitan hacer grandes desplazamientos. Se podría, incluso, poner una sola velocidad, y esto no influiría demasiado en el uso, pero con dos resulta más cómodo.
En la práctica, el superponer el sistema de elevación al de rotación puede traer algunas complicaciones de espacio. Será conveniente que el mando se pueda elevar o hundir, con respecto a la base de la palanca 2 o 3 cm, con lo que producirá un recorrido de entre 4 y 6 cm. El análisis del movimiento del cilindro en sentido vertical es muy similar al que se hacía en el apartado anterior en sentido circular, el cilindro deberá disponer de una posición inicial estable (es decir, con algún
tipo de endurecimiento al accionarse al principio) y tendrá retorno que le permita volver a esa posición automáticamente. Se permitirán, así mismo, dos niveles de velocidad según se suba mas o menos el mando, como en el caso anterior.
El diseño de los endurecimientos de las posiciones iniciales estables, es un tema importante, ya que al iniciar un movimiento se debe ofrecer una resistencia (que luego desaparecerá) para evitar movimientos involuntarios, pero tampoco tan fuerte como para que no se pueda mover con comodidad. También es conveniente instalar unas ventosas en la parte inferior de la base (que debiera ser pesada) para evitar el que se levante el ARNF-82 del suelo al tirar de él hacia arriba.
Este dispositivo secundario que va montado sobre la lapa superior del cilindro, consiste en un interruptor de dos posiciones, al estilo de los elevalunas eléctricos de los coches, que si se pulsa hacia atrás se mueve la cabeza con velocidad constante hacia arriba (un máximo de 90º) hasta que se suelte y si se pulsa hacia delante, esta bajará para mirar el suelo (un máximo de 90º). Esta implementación no requiere ningún tipo de control de velocidad ni de retorno cuando una persona mira hacia arriba, se queda mirando en esa dirección hasta que se pulse la tecla hacia abajo. Evidentemente, el no tener la posibilidad de retorno a la hora de mirar, dificulta el uso, es por ello que se añade un tercer interruptor situado debajo de los otros dos, de modo que cuando se pulsa hacia abajo entre los dos interruptores o se pulsen los dos interruptores a la vez (según el tipo), se actuará sobre el situado debajo que enviará la orden desnivelar la vista.
Ya se ha definido el dispositivo de interacción en mundos virtuales, con el que el usuario puede moverse sin casi ningún tipo de restricción, en todos los sentidos y desde casi todos los puntos de vista. EI uso de este mando resulta bastante intuitivo, lo cual permitirá, por parte de los usuarios novatos, una adaptación rápida Sin embargo el navegar por un mundo virtual no sólo supone desplazarse por los distintos sitios mirando lo que pasa, también se requiere de una selección de objetos para arrastrarlos o realizar algún tipo de acción sobre ellos.
5. Creación y navegación en mundos virtuales: VRML
VRML es el acrónimo de Virtual Reality Modeling Language (Lenguaje de modelación de realidad virtual). Se trata de un lenguaje de programación con el que se pueden modelar mundos virtuales tridimensionales en internet. El fundamento es idéntico al de HTML: un servidor remoto transmite al ordenador del usuario un fichero de texto que se trata en el ordenador y se presenta de manera gráfica en el mismo. Con VRML se pueden crear mundos virtuales dinámicos en los que se pueden introducir personas y objetos virtuales, como coches, aviones, o cualquier cosa que se pueda imaginar.
Internet y WWW
El World Wide Web (WWW) es una compleja telaraña inmersa dentro de la red internacional que es Internet. Provee fundamentalmente información u otros servicios que se muestran en las denominadas páginas web, ficheros de texto acompañados de imágenes, sonidos, películas. Este tipo de páginas están programadas en un lenguaje llamado HTML (HyperText Markup Language); en él se pueden incluir enlaces a otras páginas, para poder navegar por la vasta red que conforman. En la pantalla se muestran principalmente imágenes, animaciones, texto de diferentes formatos y enlaces que pueden ser todo lo anterior.
Para poder navegar por la “Web” es necesario disponer de un programa que interprete el archivo de texto que recibe y que sepa dónde poner las imágenes y enlaces. Para que este programa sepa qué tipo de archivo está recibiendo, existen unas descripciones llamadas MIME, que posee el navegador, y que le permiten cargar los ficheros que recibe con una u otra aplicación. Por ejernplo si recibe un fichero *.mpg de video el navegador tendrá que cargar el reproductor multimedia pero si recibe un fichero de tipo *.htm lo tratará él mismo algunos de estos navegadores son Netscape e Internet Explorer.
Navegando por la Web en Tres Dimensiones
Cuando un navegador de web sigue un enlace, obtiene el fichero de la web y comprueba su contenido MIME, que describe la información que se encuentra en el archivo Si contiene texto HTML o imágenes el navegador de web reproduce directamente el documento. Para presentar otro tipo de ficheros o información como sonidos películas o mundos VRML, el navegador de web tiene que pasar la información a una aplicación auxiliar que comprenda específicamente este tipo de archivos o bien dársela a programas que son capaces de ejecutarlos en la misma ventana del navegador (plug-in apps ).
Para poder ver documentos de VRML, es necesario una aplicación auxiliar o una plug-in llamada navegador de VRML.
Con VRML se pueden crear enlaces relacionables con figuras tridimensionales del mundo virtual de modo que si se pincha en alguna de estas figuras el navegador de cargara automaticamente el documento VRML al que se refiera ese enlace. De este modo se puede navegar en la web, de mundo virtual en mundo virtual, tal y como se hace con HTML.
Imágenes, Películas y Sonidos
Como en las páginas web de HTML en VRML se pueden incluir imágenes archivos de sonido y de vídeo en el mundo virtual VRML da además la posibilidad de insertar estos archivos como objetos que forman parte de ese mundo Por ejemplo en una habitación virtual, se puede insertar una imágen (plana, por definición) de un cuadro virtual de Picasso, colgado en una pared, crear una televisión virtual cuyo frontal sea un archivo de vídeo mpeg y una cadena de música que reproduzca una fuga de Bach. Además es posible el situar fuentes de sonido en el mundo virtual, de modo que si está a la derecha del usuario, éste lo escuchará más fuerte por el auricular derecho. También se puede describir la orientación de la fuente de sonido, por ejemplo, un altavoz en la habitación virtual, emitirá mayor cantidad de sonido hacia delante que hacia los lados o hacia detrás. Por supuesto se producirá una atenuación del sonido que escucha el usuario a medida que este se aleje de la fuente.
Animación de objetos autónomos
VRML no sólo puede producir mundos virtuales estáticos, con “simples” intersecciones de imágenes, películas y sonidos, también es capaz de animar los objetos, siguiendo una característica propia o por interacción del usuario. Los objetos autónomos son aquellos que describen un movimiento, independientemente de lo que haga el usuario. Igual que todo objeto, se construye en el origen de coordenadas (0,0,0) para luego desplazarse y rotarse, pero además se puede crear una trayectoria por la que el objeto en cuestión se desplace. Si el movimiento se hace indefinido, entonces se crea un objeto autónomo permanente, por ejemplo, los peces moviendose en una pecera virtual.
Para animar un objeto, se requiere que en cada momento se indique el grado de rotación y el vector de traslación que sufre el mismo. Dado que resulta difícil saber con qué frecuencia se debe refrescar la imagen y casi imposible definir los parámetros arriba citados en cada momento, VRML permite definir únicamente unos vectores de rotación y traslación inicial y final, con el tiempo deseado que transcurra entre ambos momentos. De este modo el navegador se encarga de calcular y mostrar en pantalla los distintos estados intermedios, cuyo número dependerá de la capacidad del ordenador: cuanto más rápido sea este, podrá calcular y mostrar más imágenes del objeto en el intervalo de tiempo establecido, si la superficie del objeto resulta ser brillante, o el objeto en si es una fuente de luz, el navegador tendrá que calcular además todas las consecuencias que el movimiento de ese objeto produce en los demás, o sobre sí mismo en el caso de sombras y reflejos).
Interacción con mundos VRML
Todavía queda un punto no desdeñable, y es que en VRML se pueden programar acciones asociadas a eventos, de modo que al producirse un acontecimiento dado, se puede desencadenar una acción concreta. Los acontecimientos pueden ser de cualquier tipo (p.e. un reloj que descuente y que haga explotar una bomba cuando llegue a cero), pero la mayoría de las veces están producidos por acciones del usuario (normalmente pinchar con el ratón). De este modo se puede encender una televisión virtual, subir el volumen o cambiar de canal, cada acción tiene una consecuencia en el mundo.
El hecho de entrar en un ascensor virtual y pinchar sobre algún piso, implica que se deben cerrar las puertas, trasladar al usuario unos pisos más arriba, y abrirlas otra vez. Las posibilidades son muchas, pero se ven un poco limitadas por la debilidad de VRML como lenguaje de programación. Es por eso que VRML es capaz de ejecutar, como se hace en los archivos de HTML, programas en java y javascript, que aportan una potencia extra, y que amplían el campo de acción en un mundo virtual casi al infinito.
No hay que olvidar que toda la potencia que se está describiendo en estos últimos apartados, debe transmitirse a través de un fichero de texto, algunas imágenes y sonidos por la red. El objetivo que se persigue con VRML es que el usuario navegue por un mundo tridimensional en el que pueda interactuar, en tiempo real, con otros usuarios, a través de la web. Ya hay algunos mundos en la red en los que se tiene casa virtual, trabajo virtual y se puede hablar a personajes virtuales, que en realidad representan a otros usuarios que están interactuando desde sus respectivos ordenadores. De este modo se crea una aldea global en el sentido amplio del término, en el que la realidad virtual proporcionará, poco a poco, las mismas sensaciones que produce el mundo real.
6. Conclusión
A través de los diferentes capítulos de este trabajo se ha querido poner de manifiesto la teoría de la realidad virtual y el estado de desarrollo en que se encuentra actualmente. En algunos aspectos se han conseguido avances tecnológicos espectaculares con respecto a hace unos pocos años, pero quedan puntos negros que serán difícilmente resolubles a corto plazo, para que el usuario se encuentre en un mundo virtual como está en el real (objetivo ultimo de la realidad virtual).
Por otra parte se ha realizado una propuesta de mando de realidad virtual que si bien no pretende competir con datagloves y otros, se plantea ser una alternativa económica a este tipo de dispositivos. El diseño de este mando es completamente original, tomando únicamente como referencia la información contenida en estas páginas. Si bien tiene pequeñas complicaciones mecánicas y técnicas, seria viable la construcción de un modelo básico, con una cantidad reducida de recursos, a corto-medio plazo y podría plantearse como herramienta ideal de navegación en mundos creados con VRML.
Y con VRML y sus casi infinitas posibilidades termina este documento. Es díficil prever que futuro tendrá el navegar por internet en tres dimensiones, debido, sobre todo, a la gran necesidad de recursos que requiere la renderización en tiempo real, y a que hoy en día la mejor manera de obtener información es a través del texto en dos dimensiones (HTML), pero teniendo en cuenta que el ser humano siempre buscará interactuar de una manera lo más parecida a como lo hace en la realidad, VRML se plantea como una alternativa muy seria al mundo real. Sólo hace falta que esta manera de comunicar se extienda a través de Internet como el propio Internet, para que así todo el mundo pueda disfrutar de sus ventajas.
Descargar
| Enviado por: | Paredes Rizo |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.