Aeronáutica y Aviónica
Receptor GPS (Global Position System)
EL RECEPTOR GPS.
Es el conjunto de elementos (Software y Hardware) que permiten determinar la posición, velocidad y tiempo de un usuario, además de los parámetros necesarios adicionales que requiera.
1-Funciones del receptor.
1-Identificación y seguimiento de los códigos asociados a cada satélite.
2-Determinación de las distancia.
3-Decodificación de las señales de datos de navegación para obtener las efemérides, el almanaque....
4-Aplicar las correcciones (del reloj, ionosféricas,...).
5-Determinación de la posición y velocidad.
6-Validación de los resultados obtenidos y almacenamiento en memoria.
7-Presentación de la información.
Según la dinámica pueden ser de baja, media y alta dinámica.
Hay que diferenciar entre:.
- Dinámica lineal: velocidad, aceleración y derivada de la aceleración.
- Dinámica angular: guiñada, balance y cabeceo.
Equipos de baja dinámica: Usuarios terrestre. No tiene dinámica angular. Suele ser de un solo canal.
Equipos de media dinámica: Helicópteros y aviones. Son de varios canales.
Equipos de alta dinámica: Helicópteros y aviones. Son múltiples canales.
El concepto “todos los satélites a la vista” implica un seguimiento continuo de 12 satélites, y las nuevas tendencias van dirigidas a la utilización de las constelaciones GPS y GLONASS de manera conjunta, lo que lleva a receptores con 20 canales
Piloto
automático
Diagrama de bloques de un receptor de GPS.
Antenas
y
conexiones
Receptor
Procesador
Unidad
de
presentación
Unidad
de
control
La normativa vigente en España autoriza la utilización del GPS pero únicamente como sistema suplementario de navegación. Esto implica que si en algún momento del vuelo el GPS falla, seguimos teniendo las ayudas tradicionales (VOR, DME). Excepcionalmente en rutas oceánicas remotas está permitido el uso de GPS como medio único de navegación.
Un sistema primario de navegación debe cumplir con cuatro características fundamentales :
-
Precisión
-
Continuidad
-
Integridad
-
Disponibilidad
Por definición, la continuidad y disponibilidad no están garantizados en el sistema GPS, por lo que no puede considerarse un sistema primario.
2-Descripción del modo de funcionamiento de un receptor GPS
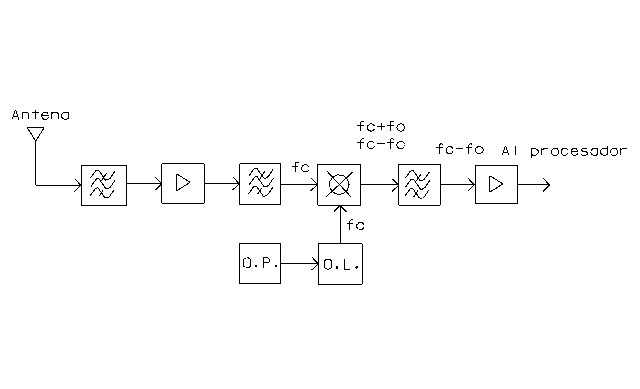
2.1-Etapa de recepción : Frecuencia intermedia.
La señal procedente de un satélite llega a la antena del receptor. La señal recibida pasa por un filtro pasa-banda que elimina las señales que no interesan. A continuación la señal es introducida en un amplificador de gran calidad y con baja ganancia de ruido (4dB) a fin de no arrastrar el ruido por el resto de las etapas. La señal atraviesa un filtro pasabajos que elimina armónicos indeseables y a continuación, en un mezclador, mezclamos la señal recibida (fc) con la procedente de un oscilador local (fo) y obtenemos fc+fo y fc-fo. Mediante un filtro pasabajos nos quedamos con la frecuencia más baja (fc-fo). Repitiendo el proceso podemos reducir la frecuencia hasta el nivel adecuado, y entonces amplificaremos la señal y pasaremos a la etapa de procesado. Un esquema puede observarse en la figura siguiente
2.2-Etapa de procesado de la señal.
En el procesador de señales las misiones que se realizan son :
-
Sincronización en fase y frecuencia del satélite y el receptor
-
Sincronización de los códigos PRN del satélite y los generados internamente.
Al ser el nivel de potencia de las señales recibidas del orden de -160dB en el entorno de la superficie terrestre menor que el nivel correspondiente al ruido, se requiere la utilización de técnicas de correlación para su detección y captura. Es necesario correlar en frecuencia y en código, y para esto existen distintas técnicas :
Cuadratura de portadora (Squaring)
Trata de correlar, en principio, la frecuencia, para posteriormente correlar el código. La correlación de frecuencia se hace para enganchar en fase a cada una de las señales presentes en la antena del receptor.
Las señales transmitidas, que son de la misma frecuencia, por efecto Doppler son recibidas con distinta frecuencia y por ello es posible su separación través de bucles de control automático de frecuencia y fase.
La técnica squaring o método de Counselman consiste en multiplicar por sí misma la señal recibida, con lo que se obtiene la frecuencia doble sin modulación en la salida.
La desviación de frecuencia Doppler no sólo afecta a la portadora, sino también a las señales que modulan a esta. Esto significa que los códigos réplica, generados por el receptor, deben ser corregidos en frecuencia en la misma proporción que se hace con la frecuencia del oscilador local. Al receptor llega la señal compuesta por superposición de todos los campos procedentes de los satélites más el ruido N(t). Si consideramos solo código C/A y señal L1 :
Descargar
| Enviado por: | Isaac Solano Martín |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.