Telecomunicaciones
Radares
EL RADAR
ÍNDICE
1. Introducción pág. 3
2. Sistemas de Radar pág. 3
2.1. Principios de radar pág. 3
2.2. El radar: de dónde viene y hacia dónde va pág. 3
2.3 ¿Qué informaciónpuede ofrecer el radar sobre nuestro entorno? pág. 5
2.4. ¿Qué vamos a hacer con todos esos datos y cómo afectaran al…? pág. 6
3. Procesamiento de imágenes de radar pág. 6
4. Sistemas y aplicaciones pág. 8
5. Tipos de radares pág. 9
5.1. RAR pág. 9
5.2. SAR pág. 10
Anexo 1:el radar meteorológico pág. 11
1. Introducción
El Radar es un sistema electrónico que permite detectar objetos y determinar la distancia a que se encuentran proyectando sobre ellos ondas de radio que son reflejadas por el objeto y que al ser recibidas de nuevo por la antena del radar permiten calcular la distancia a la que se encuentra el objeto, en función del tiempo que tardó en ir y volver la señal de radio
De todos es conocida la utilización del radar en el control del tráfico aéreo y en el control policial de la velocidad en el tráfico rodado. Además, estos están siendo utilizados en sistemas especiales que permiten formar, mediante un elaborado procesado de la señal radar, imágenes de la superficie planetaria con resoluciones del orden de algunos metros. Las aplicaciones potenciales de estos sistemas son innumerables: cartografía de zonas de alta nubosidad (inaccesibles mediante sensores ópticos), obtención de modelos topográficos a escala mundial de alta precisión, exploración de otros planetas o satélites con atmósfera, determinación de recursos hídricos, vegetación, clasificación de cultivos, etc.
El trabajo presentado a continuación presenta una visión detallada de lo que es "Un Sistema de Radar", el principio de funcionamiento de estos, los tipos existentes , entre otros tópicos que nos permitirán adentrarnos en tan importante campo de investigación .
2. Sistemas de Radar
Principios de Radar
El Radar es un sistema electrónico que permite detectar objetos y determinar la distancia a que se encuentran proyectando sobre ellos ondas de radio que son reflejadas por el objeto y que al ser recibidas de nuevo por la antena del radar permiten calcular la distancia a la que se encuentra el objeto, en función del tiempo que tardó en ir y volver la señal de radio.
La palabra radar corresponde a las iniciales de "radio detection and ranging", y fue utilizado por las fuerzas aliadas durante la IIª Guerra Mundial para designar diversos equipos de detección y para fijar posiciones. No sólo indicaban la presencia y distancia de un objeto remoto, denominado objetivo, sino que fijaban su posición en el espacio, su tamaño y su forma, así como su velocidad y la dirección de desplazamiento.
Aunque en sus orígenes fue un instrumento bélico, hoy se utiliza ampliamente para fines pacíficos, como la navegación, el control del tráfico aéreo, la detección de fenómenos meteorológicos y el seguimiento de aeronaves.
El Radar: de dónde viene y hacia dónde va
De todos es conocida la utilización del radar en el control del tráfico aéreo y el temido control policial de la velocidad en el tráfico rodado. Pero ¿cuándo se inventó el radar, cómo ha evolucionado hasta nuestros días y qué otras aplicaciones tiene?
Aunque no puede hablarse de una fecha precisa, los orígenes del Radar se sitúan a mediados de la década de los 30 . Estamos pues ante una disciplina con casi 60 años de vida, anuque existen algunos precursores anteriores. El propio Hertz en sus experimentos (1888) ya constató la perturbación que objetos de diversa naturaleza causaban en las ondas de radio. En 1904, el alemán C. Hülsmayer patentó un sistema destinado a la detección radioeléctrica de barcos . No obstante, en aquella época el interés político e industrial en estos sistemas es escaso y no se va más allá de algunas experiencias aisladas.
La tensión internacional existente en los albores de la segunda guerra mundial, hizo que las administraciones de todos los países con tecnología propia en radio impulsaran el desarrollo de los primeros radares. Estos sistemas radiaban señales de onda continua o pulsadas en HF,VHF,UHF siendo capaces algunos de ellos de detectar y situar aviones a distancias del orden del centenar de kilómetros.
A principios de los 40, dos investigadores ingleses de la Univ. de Birmingham inventan el magnetron de cavidad, capaz de generar potencias de kilowatios a frecuencias de microondas.
La posibilidad de lograr directividades elevadas con antenas pequeñas impulsó fuertemente el desarrollo tecnológico en esta banda hasta el punto de que gran parte de los dispositivos pasivos de potencia de microondas tal como los conocemos en nuestros días se desarrollaron en esta década. El entonces código secreto de denominación de las bandas de microondas: L (1-2 GHz),S (2-4 GHz),C (4-8 GHz),X (8-12.5 GHz),etc. se ha consolidado como el estandard actual.
En esta época el radar fue aplicado fundamentalmente a intereses militares: vigilancia y localización aérea y marítima, control de tiro, etc., siendo aplicado también como ayuda a la navegación al creciente tráfico aéreo civil.
En los años 50 se profundizó en las bases teóricas del radar, consiguiéndose determinar los límites alcanzables en la detectabilidad, determinación de posición, velocidad, etc. Algunos conceptos fundamentales como el filtro adaptado, compresión de pulsos, teoría de la detección, etc. se desarrollan por radaristas de esta época, aplicándose posteriormente a los sistemas de telecomunicación. La disponibilidad de los klystron, válvulas de potencia capaces de amplificar linealmente en el margen de microondas permitió la utilización de señales elaboradas de larga duración y gran energía, obteniéndose resoluciones de distancia comparables a impulsos mucho más cortos.
En esta década empiezan a consolidarse algunas aplicaciones civiles del radar como ayuda a la navegación aérea y marítima, radares meteorológicos proporcionando información en tiempo real sobre precipitaciones, vientos, etc. y los radares de apertura sintética (SAR) ideados para formar imágenes de alta resolución de la superficie terrestre.
A partir de los años sesenta hasta la actualidad, el radar ha impulsado y se ha beneficiado del gran progreso tecnológico en materia de estado sólido, circuitos y procesadores digitales, amplificadores de potencia y bajo ruido, agrupaciones de antenas de fase controlada, etc. Estos avances han permitido construir sistemas altamente complejos como los radares tridimensionales capaces de situar y seguir centenares de blancos en distancia, acimut y elevación, o los radares transhorizonte que al trabajar en HF poseen alcances del orden de 2000 km. También se han desarrollado nuevos sistemas concebidos para el sondeo geológico subterráneo o radares laser (lidares) para la medida de aerosoles y contaminantes en la atmósfera.
Indudablemente los intereses de defensa han seguido iniciando y financiando el desarrollo del radar, los avances e innovaciones se han transferido en pocos años a los ámbitos civil y comercial del radar y las telecomunicaciones. Sin embargo, esta situación ha empezado a cambiar recientemente al dedicarse un creciente esfuerzo científico y dotación de recursos directamente a programas de observación de la Tierra con técnicas de teledetección. La monitorización de parámetros geofísicos en un momento de creciente preocupación por la estabilidad climática y biológica de nuestro planeta, está impulsando el desarrollo de nuevos sensores radar aerotransportados o embarcados en satélites.
Aunque los sensores tradicionales utilizados en teledetección son ópticos (Meteosat, Landsat, Spot, etc.), puede afirmarse que el radar se ha convertido en el centro de atención: en los últimos dos años más de la mitad de los trabajos publicados en una de las revistas de teledetección más prestigiosas se centran en el estudio de las aplicaciones del radar.
¿Qué Información puede Ofrecer el Radar sobre Nuestro Entorno?
Al margen de algunas aplicaciones ya consolidadas como la meteorología radar, sondeo ionosférico y del subsuelo, etc., los trabajos de I+D actuales se centran en tres tipos de sensores embarcados en satélite: altímetros, radares de apertura sintética (SAR) y dispersómetros
Los Altímetros permiten determinar con una precisión del orden del centímetro la superficie promedio de mares y océanos (geoide), de la que puede obtenerse por ejemplo la topografía submarina a escala mundial.
Los Radares de Apertura Sintética permiten formar, mediante un elaborado procesado de la señal radar, imágenes de la superficie planetaria con resoluciones del orden de algunos metros. Las aplicaciones potenciales de estos sistemas son innumerables: cartografía de zonas de alta nubosidad (inaccesibles mediante sensores ópticos), obtención de modelos topográficos a escala mundial de alta precisión, exploración de otros planetas o satélites con atmósfera, determinación de recusos hídricos, vegetación, clasificación de cultivos, etc.
Los Dispersómetros permiten obtener información sobre la naturaleza de las superficies observadas o del viento sobre el mar a partir de la medida precisa de la reflectividad radar.
En 1978 la NASA lanzó el Seasat, un satélite destinado fundamentalmente a la observación del mar dotado de los tres sensores radar citados. La vida del satélite quedó reducida a tres meses debido a una avería en su sistema energético, sin embargo el enorme volumen de datos suministrado (aún hoy en dia no ha concluido su análisis) permitió evaluar las aplicaciones previstas e idear otras nuevas.
En estos últimos años todas las administraciones espaciales están dedicando inversiones considerables al desarrollo de sensores radar:los EEUU han utilizado su lanzadera para realizar varias campañas de medidas SAR: SIR A, SIR B y la próxima SIR C. La misión SAR del Magallanes (Magellan) a Venus ha cartografiado con éxito la totalidad del planeta. En paralelo están desarrollando una gran plataforma espacial (El Earth Observation Sytem) dotada de sensores de variada naturaleza entre ellos el radar.
La Agencia Espacial Europea (ESA) está explotando desde 1991 el Satélite ERS-1 dotado como el Seasat de los tres tipos de sensores, y se dispone a lanzar próximamente una versión mejorada: el ERS-2, a la vez que ya está diseñando nuevos sistemas de concepción más avanzada.
Japón puso en órbita en JERS-1 en 1992 un satélite SAR dedicado fundamentalmente a aplicaciones geológicas. Hacia finales de 1994 Canadá pondrá en órbita su satélite RADARSAT con un SAR especializado en monitorización de hielos y zonas forestales.
Rusia posee también dos satélites SAR Almaz I y II, y curiosamente está comercializando los datos obtenidos a través de una agencia en EEUU.
¿Qué vamos hacer con todos estos datos y como van a afectar la vida del ciudadano de a pie?
En primer lugar la explotación comercial de estos sistemas aún en fase de investigación es aún limitada. Se espera una utilización progresiva de estas técnicas en los próximos años por parte de las administraciones medioambientales, de planificación de recursos, territorio, etc. que a su vez tomarán decisiones políticas que nos afectarán a todos. En el ámbito de la ciencia y la ingeniería el desarrollo de estas técnicas se traduce en oportunidades de trabajo en la industria de alta tecnología y espacial y también en el sector de servicios añadidos derivados de los datos.
3. Procesamiento de Imágenes de Radar
El término Radar ("Radio Detection And Ranging") ha sido utilizado de forma genérica para clasificar los sistemas que operan en la región de frecuencias del microondas. Estos sistemas fueron utilizados inicialmente con fines militares durante la Segunda Guerra Mundial y posteriormente con fines civiles a partir de la década del 70.
La creciente utilización del uso de imágenes de la región de microondas se debe a las características propias del sistema de captación de estas imágenes, ya que la región espectral de operación permite una alta transmisión de las ondas electromagnéticas en la atmósfera independiente de la iluminación solar, e inclusive durante precipitaciones o condiciones de nubosidad, pudiendo generar imágenes bajo las condiciones más adversas.
La transmisión de las ondas electromagnéticas por un medio es directamente proporcional a la longitud de onda, de esta forma cuanto menor es la frecuencia del radar mayor será su penetración. Esta facilidad permite la obtención de imágenes donde los sistemas que operan en la región del visible y del infrarrojo se muestran ineficientes, principalmente en situaciones de extensa cobertura de nubes como es la región amazónica.
La figura a seguir presenta la curva del porcentual de transmisión de las ondas por longitud de onda, que abarca la región del visible, infrarrojo y microondas.
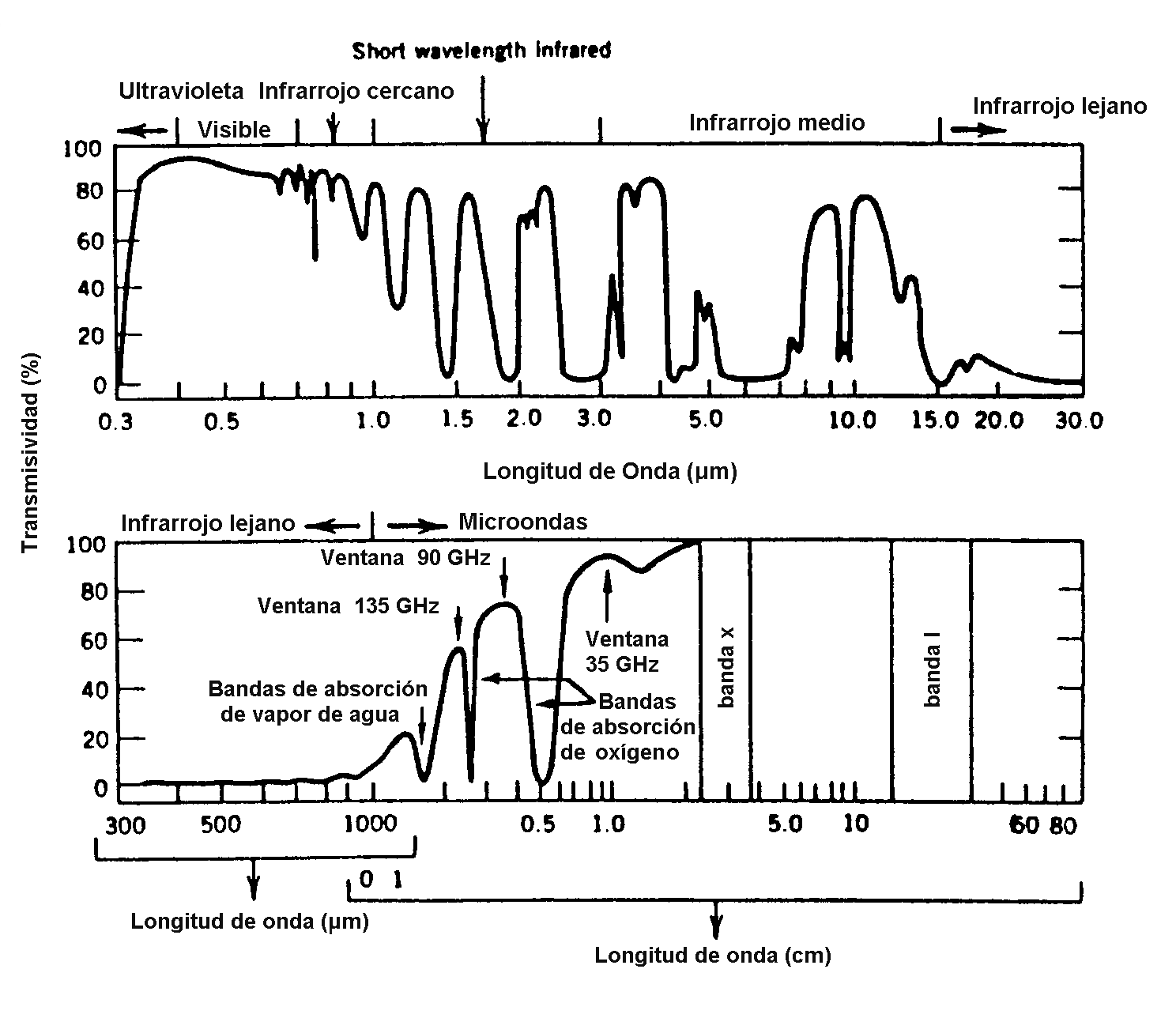
La extensión de la penetración depende de la humedad, de la densidad de la vegetación, bien como de la longitud de onda. De esta manera, longitudes de onda menores interactúan con los estratos superficiales de la vegetación y las longitudes de onda más largas con los estratos inferiores de la vegetación, pudiendo en algunos casos hasta interactuar con el suelo o inclusive con el subsuelo.
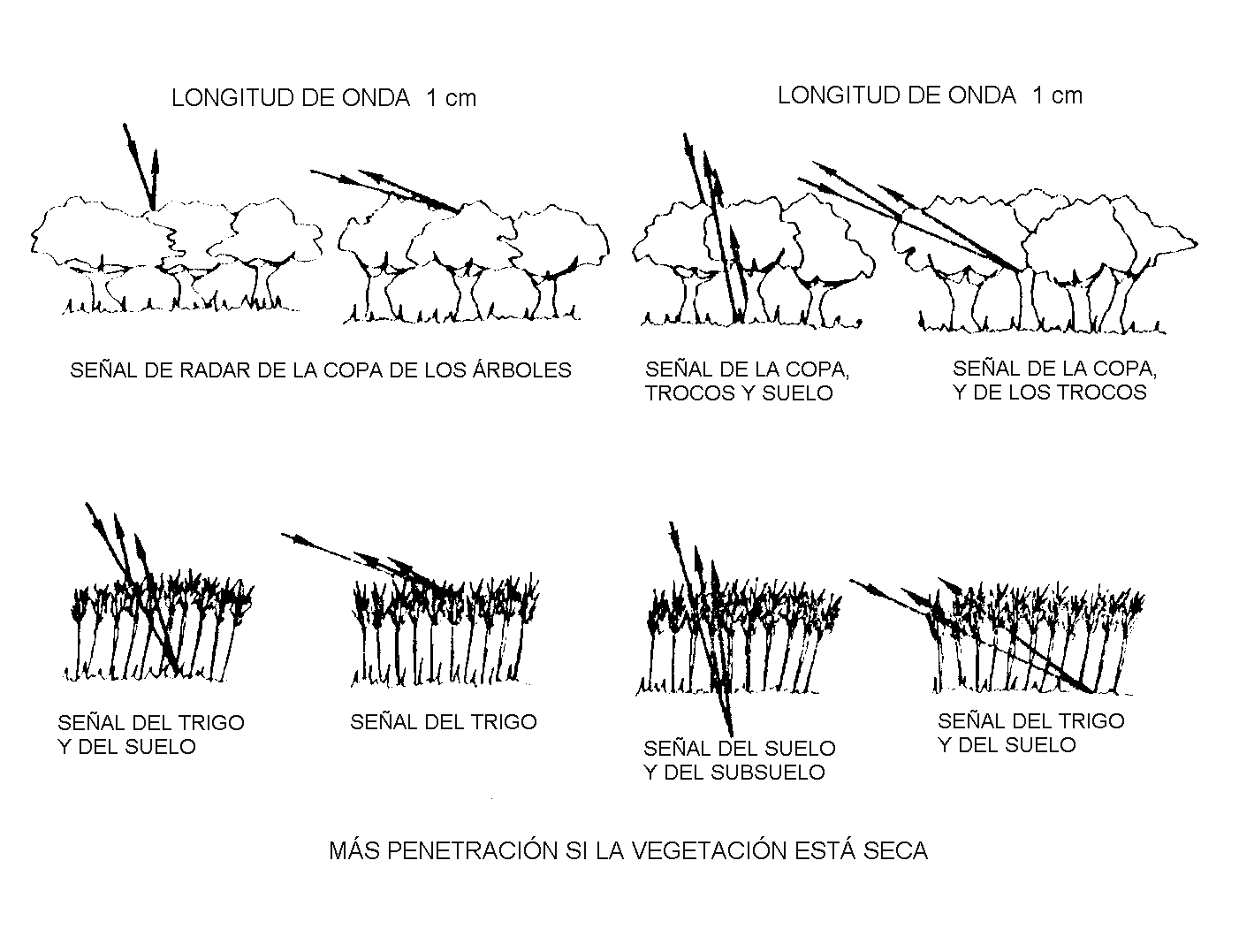
Penetración de las señales de Radar en vegetación.
Mientras que en la porción del espectro óptico la interacción ocurre a nivel de resonancia molecular en la superficie de contacto, en microondas la respuesta está condicionada por la geometría y la profundidad de las grandezas dieléctricas de la superficie.
La combinación de imágenes de microondas y del espectro óptico permite comprender mejor los diferentes albos ya que se pueden inferir las diferentes propiedades de los mismos.
Los sistemas de radar pueden ser agrupados en imageadores (o generadores de imágenes) y los no imageadores (Ulaby et al., 1981a). Los imageadores comprenden los sistemas de antena rotatoria, los radares de vista lateral de abertura real (SLAR) y los radares de vista lateral de abertura sintética (SAR). Entre los no imageadores se destacan los escaterómetros, los espectrómetros y los altímetros.
4. Sistemas y Aplicaciones
Los SLAR-RAR (Radares de Vista Lateral de Abertura Real) fueron los primeros sistemas imageadores por microondas, los cuales fueron utilizados durante la II Guerra Mundial como auxiliares a bombardeos nocturnos.
El SLAR posee una antena que ilumina lateralmente los albos con un haz que es amplio verticalmente y estrecho horizontalmente. El barrido para la obtención de la imagen es producido por el propio movimiento de la aeronave durante el paso sobre el área a ser recubierta. Este radar presenta el inconveniente de que su resolución azimutal es directamente proporcional a la distancia entre la antena y el albo imageado, e inversamente proporcional a la longitud de onda de la antena utilizada para el imageamiento. De esta forma, para obtener una mejor resolución azimutal es preciso disminuir la distancia entre el radar y el albo o aumentar la longitud de la antena.
Con el desarrollo del Radar de Abertura Sintética (SAR) en la década del 50, fue solucionado el problema descrito antes, ya que la resolución azimutal de este nuevo sistema no depende de la distancia entre el radar y el albo. La utilización para uso civil de estos radares, se inició en la década del 70, cuando fueron realizados algunos programas utilizando imágenes de radar a bordo de aeronaves.
La utilización de radar a nivel orbital se inició con el lanzamiento del SEASAT en 1978 y con base en sus datos, la NASA comenzó el Programa SIR ("Shuttle Imaging Radar"), que consistió en una serie de vuelos de corta duración.
Dentro de este programa fueron lanzados el SIR-A, el SIR-B en 1981 y 1984 respectivamente y el SIR-C en 1994. Las misiones con una duración mayor, se iniciaron con el lanzamiento del ALMAZ-1 en 1981, ALMAZ-2 en 1991, ERS-1 en 1991 y JERS-1 en 1992, ERS-2 en 1995 y el RADARSAT en 1995.
| 5. Tipos de radares |
| Los radares primeramente pueden dividirse en dos grandes grupos, radares activos y radares pasivos. |
| Los radares activos emiten pequeños pulsos de microondas en la dirección de interés y reciben y almacenan la energía dispersada por los objetos dentro de un campo de un captura de la imagen. |
| Los radares pasivos reciben niveles de radiación de microondas emitidas por los objetos en su ambiente natural. |
| De acuerdo con el tamaño de la antena, los radares también pueden dividirse en dos grandes grupos: |
| Real Aperture Radar (RAR) |
| Synthetic Aperture Radar (SAR) |
| RAR |
| Los RAR son equipos donde el tamaño de la antena es controlado por la longitud fisica de la antena. También son conocidos como radares no coherentes. |
| La ventaja de los equipos RAR esta en su diseño simple y en el procesasmiento de los datos. Sin embargo su resolución es pobre para el rango cercano, misiones de baja altitud y longitudes de onda baja. El uso de estos datos estaría limitado para longitudes de onda mas corta y sería dificil aplicarlos a estudios atmosféricos o de dispersión, debido a que las misiones vuelan a baja altitud y su cobertura es pequeña. |
| La resolución de la imagen es limitada por la longitud de la antena. La antena necesita tener varias veces el tamaño de la longitud de onda para reducir el ancho de banda de la señal emitida. Sin embargo es impráctico diseñar una antena suficientemente grande como para producir datos de alta resolución. |
| SAR |
| Los SAR (Synthetic Aperture Radar) son sistemas de radares coherentes que generan imágenes de alta resolución. Una apertura sintética o antena virtual, consiste en un extenso arreglo de sucesivas y coherentes señales de radar que son transmitidas y recibidas por una pequeña antena que se mueve a lo largo de un determinado recorrido de vuelo u órbita. El procesamiento de la señal usa las magnitudes y fases de la señal recibida sobre sucesivos pulsos para crear una imagen. |
| Los puntos en los cuales sucesivos pulsos son transmitidos son considerados como largos arreglos sintéticos usados para generar la imagen SAR. Se envian pulsos de señal a los mismos puntos de la superficie terrestre en dos o más momentos distintos de la trayectoria del radar y la resolución que se obtiene es equivalente a la que si se utilizara una antena de similar longitud que la distancia entre los pulsos. Esta concepto de larga antena virtual es la base the los radares de apertura sintética. |
| Los SAR son instalados sobre aviones o plataformas espaciales y han servido para mapear la superficie de la tierra aun en condiciones atmosférica adversas, también son herramientas útiles para mapear la superficie del mar. |
| Algunos aplicaciones de los sensores SAR son incluidos en diferentes modos de aplicación como son los ScanSAR, SpotlightSAR, polarimetricSAR, interferometricSAR o InSAR. |
| A los RAR y SAR transportados en aviones se los denomina SLAR (Side Looking Airbone Radar) y difieren en el poder de resolución. |
| El equivalente optico en un sistema de radar es una antena rectangular qur transmite y recibe energía de microondas. La resolución es dependiente de la longitud focal en sensores ópticos y de la longitud de la antena en la direccion del vuelo del sistemas radar. |
| Las antenas son análogas a los sistemas de lentes en los que una antena larga se puede comparar a la lente de un telescopio (longitud focal larga), mientras que una antena más corta es similar a una lente angulosa ancha (longitud focal corta). Para continuar la analogía, una antena larga proporciona a una imagen detallada o de alta resolución de un área pequeña, mientras que una antena corta provee una imagen de un área grande con menos detalle. |
| La resolución en un sistema de radar es controlada por la longitud del pulso de la señal y el ancho del rayo proveniente de la antena. La longitud del pulso determina la resolución en la dirección de propagación de la energía (dirección del alcance). Pulsos más cortos dan lugar a una alta resolución en el alcance. |
| El ancho del rayo proveniente de la antena determina la resolución en la dirección del vuelo o del azimut. La amplitud de la señal es directamente proporcional a la longitud de onda del radar e inversamente proporcional al longitud de la antena que la transmite. |
| Esto significa que la resolución se deteriora con la distancia a la antena. Para tener una alta resolución en la dirección del azimut, la antena de radar debe ser muy larga. |
Anexo 1: el radar meteorológico.
Fondo histórico
-
La capacidad de los radares meteorológicos para detectar la lluvia ya era conocida en los años 40 (ver Figura 1.0). Su desarrollo inicial se produjo durante la segunda guerra mundial tras la invención del magnetrón de resonancia, con el que fue posible emitir una cantidad considerable de potencia a unas longitudes de onda de varios centímetros.
-
Una de las consecuencias no buscadas fue que la lluvia y la nieve se hicieron claramente visibles. Esa nueva habilidad para detectar la lluvia de forma remota, observar su patrón en el espacio y su evolución en el tiempo fue la impulsora del desarrollo de los radares meteorológicos.
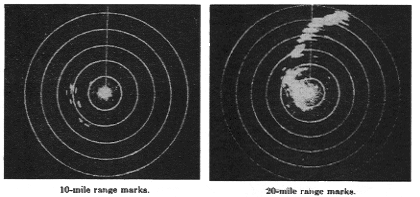
Figura 1.0 Imágenes recogidas en el MIT, en Cambrige Massachusetts, en 1942 por un radar de banda S. Figura extraída de Radar in Meteorology, (Battan memorial and 40th anniversary of the radar meteorology,Ed. AMS).
Funcionamiento básico
-
El principio de funcionamiento del radar meteorológico es el de emitir a través de una antena un pulso de energía electromagnética de duración t (del orden de los ms) y de longitud de onda l (del orden de los centímetros, ya que el blanco deseado son las gotas de agua) (Figura 1.1).
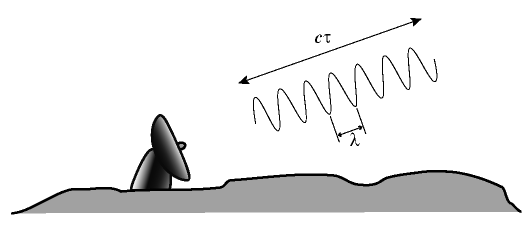
Figura 1.1 Idealización de la emisión de un pulso de duración ð y de longitud de onda ð. Ese pulso al ser emitido a la velocidad de la luz, c, se extenderá por un intervalo cð.
-
Esa energía se concentra en un haz que al emitirse al exterior y por efecto de la difracción toma una forma cónica. En el interior de ese cono la energía no se distribuye de forma uniforme sino en forma de lóbulo: es mucho mayor en el centro y decrece rápidamente al alejarse de éste.
-
Debido a que es imposible confinar toda la energía en dicho cono parte de ésta escapa fuera de él. Como resultado la energía emitida se distribuye en forma de un lóbulo central (que es el que contiene la mayor parte de la energía) y una serie de lóbulos secundarios de menor energía (ver Figura 1.2).
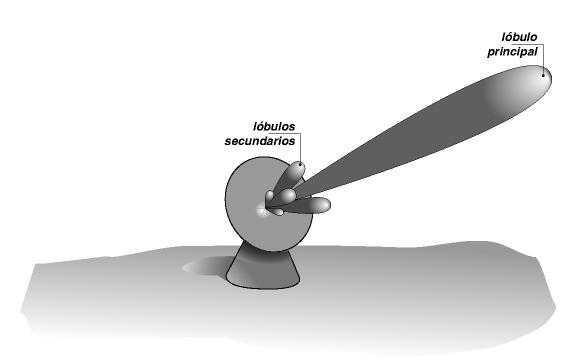
Figura 1.2 Idealización de la distribución de la energía emitida por el radar en un lóbulo central y una serie de lóbulos secundarios.
Captación de la energía por una gota de lluvia
-
Cuando esa energía es interceptada por un 'blanco' (por ejemplo, una gota de agua) se dispersa en todas direcciones (ver Figura 1.3), de forma que una fracción es devuelta en dirección al radar y captada por el receptor (normalmente localizado en la misma antena).
-
La distancia al 'blanco' se determina registrando el tiempo transcurrido entre la emisión y recepción de la energía y sabiendo que dicha energía se trasmite a la velocidad de la luz.
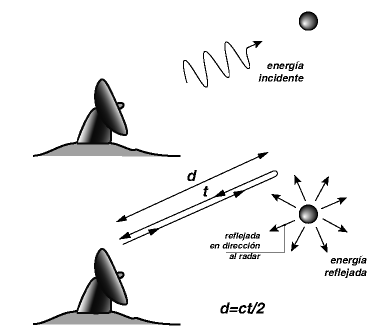
Figura 1.3 . Esquema de la energía captada y reflejada por una gota. Sabiendo que la energía se transmite a la velocidad de la luz, c, y registrando el tiempo t entre la emisión y recepción de la señal, la distancia a la gota se puede expresar como d = ct/2.
Ecuación del radar
-
En realidad lo que registra el radar es la energía devuelta en su dirección por las gotas de agua situadas en el interior de un cierto volumen Vres (ver Figura 1.4).
-
Esa energía, que se mide en forma de potencia, se puede expresar como,
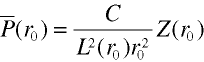
Donde P es la potencia media devuelta por las gotas situadas en el interior del Vres situado a una distancia r0 del radar. La potencia se expresa como media debido a que el radar usualmente emite un tren de n pulsos; así para un volumen situado a una distancia r0 se miden n valores de potencia que luego se promedian.
-
El motivo de tomar n medidas de un volumen es que de esta forma la medida final es mas robusta (ya que la potencia varía en el tiempo debido al movimiento de las gotas en el interior del volumen).
-
Por otro lado la constante C agrupa toda una serie de características relacionadas con el radar, es lo que se conoce como la constante del radar.
-
Finalmente la reflectividad, Z, es la variable relacionada con las gotas que se puede derivar una vez medida la potencia P. Posteriormente veremos como se define dicha variable y que como es posible relacionarla con la intensidad de lluvia.
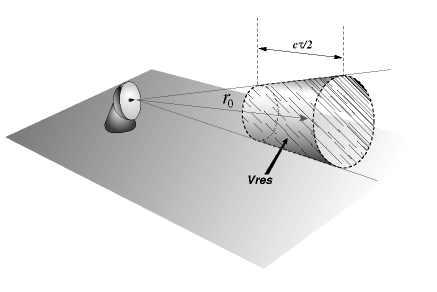
Figura 1.4 Volumen de tamaño radial c ð/2 que se corresponde con la energía medida en un instante determinado y asociada a un distancia dada.
Principio de la medida de lluvia por radar
-
La reflectividad Z se define como la suma de los diámentros a la sexta potencia de las gotas contenidas en el interior de un volumen, es decir,
Donde N(D) es función de distribución de las gotas de agua.
-
Por su parte la intensidad de lluvia se puede expresar como, el flujo de agua através de una superficie, y también se puede formular en función de N(D) como,
-
A partir de datos experimentales de Z y R se ha comprobado que las relacion entre ambas variables suele responder a una función potencial del tipo,
![]()
15
Descargar
| Enviado por: | Taz |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.