Informática
Periféricos de un Ordenador
Descripción de los Periféricos
1. INTRODUCCIÓN
Se denominan periféricos tanto a las unidades o dispositivos a través de los cuales el ordenador se comunica con el mundo exterior, como a los sistemas que almacenan o archivan la información, sirviendo de memoria auxiliar de la memoria principal. Se entenderá por periférico a todo conjunto de dispositivos que, sin pertenecer al núcleo fundamental de la CPU-Memoria Central, permitan realizar operaciones de E/S, complementarias al proceso de datos que realiza la CPU (Fig.1).
Figura 1. El PC y sus periféricos
Según la definición, éstos están constituidos por unidades de entrada, unidades de salida y unidades de memoria masiva auxiliar. Estas últimas unidades también pueden considerarse como unidades de E/S, ya que el ordenador central puede escribir (dar salidas) sobre ellas, y la información escrita puede ser leída, es decir, ser dada como entrada. Ahora bien, la información grabadas en estos soportes no es directamente inteligible para el usuario de la ordenador, esto es, no puede haber una intercomunicación directa usuario-ordenador como la que hay a través de un teclado-pantalla.
El ordenador es una máquina que no tendría sentido si no se comunicase con el exterior, es decir, si careciese de periféricos. Por lo que debe disponer de:
- Unidades de entrada, a través de las cuales poderle dar los programas que deseemos que ejecute y los datos correspondientes. Unidades de salida, con las que el ordenador nos dé los resultados de los programas.
- Memoria masiva o auxiliar, que facilite su funcionamiento y utilización.
Los dispositivos de E/S transforman la información externa en señales codificadas, permitiendo su transmisión, detección, interpretación, procesamiento y almacenamiento de forma automática.
2. PERIFÉRICOS INTERACTIVOS CON EL USUARIO
2.1. TECLADO
Permite la introducción de información en el ordenador. Su estructura consiste en una matriz de contactos, estando asociado cada uno de éstos a una tecla determinada (ver fig. 2.2.). La pulsación de una tecla cierra su contacto, lo que se detecta por métodos electrónicos de exploración sistemática de la matriz. Entonces se realiza la conversión de la posición de cierre a su código alfanumérico asociado, enviándose dicho código al ordenador, En la mayoría de los casos se producirá un almacenamiento intermedio de los códigos en un buffer. Los caracteres tecleados se presentarán por pantalla, con objeto de mejorar la comunicación con el usuario.
Figura 2.1. Interfaces del ratón y del teclado
El teclado es un periférico de entrada de comunicación lenta (a lo sumo varios caracteres por segundo). Para este tipo de dispositivos, la estandarización es prácticamente total, aunque existan pequeñas variaciones respecto de la ubicación de algunas teclas.
Figura 2.2. Estructura electrónica del teclado
2.1.1. LA ELECCIÓN DEL TECLADO
En los teclados existen dos tecnologías que controlan la pulsación de las teclas, así tenemos los teclados que funcionan por: contacto capacitivo (de membrana) o por contacto mecánico.
Los teclados mecánicos constan de una serie de teclas con unos interruptores mecánicos colocadas encima de unos muelles, que son los que hacen retornar las teclas a la posición original, de modo que al ser pulsadas éstas hacen contacto con unas terminaciones metálicas del circuito impreso del propio teclado, cerrando así el circuito, y volviendo a abrirlo al dejar de pulsar por el efecto de retorno del muelle. El contacto establecido entre los terminales metálicos de las teclas y el del circuito impreso determina la señal diferenciada.
Los teclados de membrana se componen de cuatro capas: la inferior tiene una serie de pistas conductores impresas; encima de ella, se coloca una capa de separación con agujeros justo debajo de cada una de las teclas; encima de esta se coloca una capa conductora con pequeñas montañitas debajo de cada una de las teclas y en cada montañita un conector metálico; encima de éstas se coloca una capa de goma para producir el efecto de retorno a la posición inicial. Cuando pulsamos una tecla, lo que hacemos es poner en contacto las dos capas conductoras (la primera con el circuito y la tercera con los conectores) haciendo que el circuito se cierre, y la membrana de goma hace que se separen las capas al impulsar la tecla hacia su posición inicial.
Sin embargo, los teclados mecánicos suelen requerir una pulsación más suave y con una fuerza continuada, aunque la profundidad de hundimiento de cada tecla puede hacerlo más o menos agradable dependiendo de la velocidad (pulsaciones por minuto) que queremos alcanzar al escribir. Por el contrario, los teclados de membrana requieren una mayor fuerza en el tramo final de la pulsación para vencer la resistencia de la capa de goma de cubre las capas puramente electrónicas. Esta mayor resistencia no supone un óbice para aquellas personas no acostumbradas a un teclado profesional de máquina de escribir eléctrica, dándoles mayor seguridad y provocando un menor número de errores al pulsar las teclas contiguas. Debemos recordar, sin embargo, que el teclado de membrana aguanta peor el paso del tiempo y el uso continuado, dando lugar a que ciertas teclas más usadas pierdan parte de esa resistencia a la pulsación, con la consiguiente desigualdad que notaremos al escribir e incluso llegando al extremo de que ciertas teclas puedan quedar pulsadas por la pérdida de capacidad de retorno de ciertas zonas de la membrana de goma.
Teclados ergonómicos
Se basan en el principio que dividiendo el teclado principal colocando en ángulo cada una de las mitades, los codos descansan en una posición mucho más natural, y cambiando la curvatura del teclado y añadiendo un pequeño “reposamuñecas”, el ángulo de escritura es mucho más cómodo para el usuario. Pero tienen una desventaja, y es que hace falta acostumbrarse a una disposición de teclas muy diferente, y si por diversos motivos debemos utilizar también teclados normales (en el trabajo, etc.), no acabaremos de habituarnos nunca.
Teclados programables
El propio teclado lleva un microcontrolador interno (que se comunica con la controladora de teclado de la placa base) con un programa integrado que interpreta las señales producidas al cerrarse el circuito cuando dos terminales (tecla y circuito integrado) entran en contacto. Este programa reside en una ROM, la cual puede almacenar muchos otros datos, además del código del teclado (país) y la posición de las teclas, pero para interpretarlos, se ha de instalar un driver o controlador del dispositivo que interprete las señales. Un Driver (conductor) es suministrado por el fabricante y tiene como función asegurar la compatibilidad, el buen funcionamiento y el uso de las características que dicho dispositivo ofrece. Un driver normalmente está desarrollado para un sistema operativo específico y no funcionará bajo otros entornos.
La mayoría de los teclados que se venden actualmente tienen teclas específicas para WINDOWS 9x, que son interpretadas por el propio sistema operativo sin un driver adicional, pero existen teclados desde los cuales podemos manejar parámetros concernientes al sonido, la reproducción de CDs musicales, etc. Recientemente han aparecido en el mercado teclados con teclas adicionales programables sin una función específica, a las que nosotros podremos asignar la ejecución de nuestras aplicaciones favoritas, el guardado de documentos, impresión, etc.
Teclados inalámbricos
Pueden fallar si están mal orientados, pero no existe diferencia con un teclado normal. En vez de enviar la señal mediante cable, lo hacen mediante infrarrojos, y la controladora no reside en el propio teclado, sino en el receptor que se conecta al conector de teclado en el PC.
Si queremos conectar a nuestro equipo un teclado USB, primero debemos tener una BIOS que lo soporte y en segundo lugar debemos tener instalado el sistema operativo con el “Suplemento USB”. Un buen teclado USB debe tener en su parte posterior al menos un conector USB adicional para poderlo aprovechar como HUB y poder conectar a él otros dispositivos USB como ratones, altavoces, etc.
2.2. SISTEMA DE VIDEO
Funcionalmente, el sistema de vídeo de un ordenador es un dispositivo de salida. Actualmente, estos sistemas se han convertido en algo más que los simples circuitos presentadores de textos de los primeros ordenadores personales, incapaces de representar gráficos sobre la pantalla, habiendo experimentado una rápida y constante evolución, lo que ha creado cierta confusión, debido a las diferentes especificaciones de los distintos sistemas de vídeo existentes, que hace que éstos sean incompatibles entre sí a menudo. La evolución de los sistemas de vídeo ha permitido el desarrollo de gran número de aplicaciones gráficas, que permiten una comunicación más amigable y eficiente entre usuario y ordenador.
El sistema de vídeo, por tanto, permite la presentación de información al usuario, tanto alfanumérica como gráfica. A grandes rasgos consta de un controlador, adaptador o tarjeta de vídeo y un monitor. A continuación nos encargaremos de analizar cualitativamente el funcionamiento de estos elementos.
2.2.1. MONITOR
Representa el soporte en el que se suministra la información visual. En general estará constituido por un tubo de rayos catódicos (CRT), monocromo o de color, aunque es normal encontrar monitores con display de cristal líquido, en sistemas portátiles. Las señales generadas por el controlador o adaptador de vídeo son las que se visualizarán por pantalla. El monitor incorpora controles típicos de brillo y contraste.
El funcionamiento del CRT monocromo consiste en la emisión de un haz de electrones de intensidad variable, deflectado en dos direcciones espaciales perpendiculares entre sí y al haz mediante un campo magnético generado por unas bobinas que rodean al eje del haz (ver fig. 2.3.).
La deflexión permite que el haz alcance cualquier punto de una pantalla, perpendicular a su trayectoria, que está revestida de un material fosforescente, sensible al impacto de dicho haz, siendo el grado de iluminación proporcional a la intensidad del mismo. Podemos imaginar a la pantalla dividida en puntos o píxeles (picture elements), cada uno de ellos con capacidad de iluminación independiente. Del número y tamaño de los píxeles dependerá la resolución de la pantalla. La resolución es el numero de píxeles que se pueden presentar en pantalla horizontal y verticalmente manteniendo normalmente una relación 3/4 para compensar el tamaño rectangular de la pantalla para que así el píxel sea cuadrado. Si cada píxel viene representado en memoria por N bits, 2N será el número de tonos de gris que puede adoptar. En realidad la resolución de la pantalla dependerá de las características del cañón de electrones y de las señales que reciba el monitor desde el adaptador de vídeo. Normalmente un monitor soportará varias resoluciones, estando limitado a una máxima.
Figura 2.3. Fundamento del CRT.
En el caso de un monitor en color se tienen tres haces de electrones, constando cada píxel de una tríada de puntos luminiscentes rojo, verde y azul sobre el fósforo de la pantalla. Mediante una máscara se consigue que cada haz ilumine sólo los puntos correspondientes a un color primario. La mezcla de los distintos grados de brillo de cada color primario en cada píxel produce el efecto de color. Si cada punto necesita un almacenamiento en memoria de N bits, M= 2N será el número de tonos de intensidad de color primario por punto, lo que permitirá M3 colores distintos por píxel. A efectos prácticos puede uno imaginarse un único haz electrónico con su propia intensidad y color, incidiendo sobre la pantalla.
El dot pitch o tamaño del punto es la distancia existente entre dos
puntos adyacentes. Cuanto menor sea esa distancia mejor definición
tendrá la imagen. No obstante la forma de medir la distancia entre los puntos
varia en función de la tecnología empleada en el monitor. Un punto 0,25 mm
de Trinitron equivale a un 0,28 mm en un máscara de
sombra. Los tamaños más adecuados será
como mínimo de 0,28 mm para modelos de 14 y 15 pulgadas y de 0,31 mm
para modelos de 17 pulgadas o superiores.
El monitor de un ordenador difiere de un monitor de TV doméstico en que las señales de color y temporización, producidas por el adaptador de vídeo, van por separado, lo que permite una mejor definición de texto y color, respecto de la señal composite (compuesta de sincronización, color y audio) que decodifica el receptor de TV. De todos modos hay adaptadores de vídeo que permiten generar salidas compatibles con monitores de TV, aunque ésta no suele ser la solución adoptada.
Los monitores son dispositivos de barrido por traza (raster scan). La imagen consta de un grupo de líneas horizontales (raster), cada de ellas compuesta de un número determinado de píxeles. La imagen sobre la pantalla se formará al barrer el haz toda su superficie de una forma sistemática. El adaptador de vídeo modulará la intensidad del haz en cada punto en función de la información a presentar, además de generar las señales de sincronismo adecuadas. Esto diferencia a un monitor de barrido por traza de un monitor vectorial, en el que se manipula el haz para formar directamente los gráficos o caracteres deseados sobre la pantalla (por ejemplo, el monitor de un osciloscopio). Este último tipo de monitores ya está en desuso. Los monitores poseen capacidad de scroll o desplazamiento de la información presentada en pantalla (habitualmente será vertical ascendente).
Hoy en día es habitual que los monitores soporten la “norma DDC” (canal de datos de visualización), una extensión de la norma “plug and play” “Conectar y listo”, la cual permite que la tarjeta gráfica se comunique directamente con el monitor, detectándose mutuamente y ajustando las resoluciones y las frecuencias de refresco máximas sin intervención del usuario. Esto facilita la instalación del monitor, pero en caso de no soportar esta norma, debemos instalar los drivers suministrados con el monitor o ajustar manualmente en la configuración de la tarjeta gráfica las frecuencias de refresco soportadas, atendiendo al manual del monitor. Por último, casi todos los monitores actuales soportan los “Modos VESA de ahorro de energía” (Energy Star), que posibilitan el paso del monitor a modo de ahorro de energía o “Standby”de modo automático tras el espacio de tiempo programado en la BIOS o en el sistema operativo.
La alternativa LCD
La tecnología LCD o cristal líquido, a llegado a citarse como posible alternativa de futuro frente al CRT. Ventajas como el ahorro de consumo y de espacio, así como la prácticamente nula emisión de radiaciones, aportan unas ventajas a estos dispositivos. No obstante, su elevado costo unido a los continuos avances en la tecnología CRT hacen que, por el momento, ésta última sea la opción más recomendable.
Los cristales líquidos, básicamente son sustancias transparentes con cualidades propias de líquidos y de sólidos. Al igual que los sólidos, una luz que atraviesa un cristal líquido sigue el alineamiento de las moléculas, pero al igual que los líquidos, aplicando una carga eléctrica a estos cristales, se produce un cambio en la alineación de las moléculas, y por tanto en el modo en que la luz pasa a través de ellas.
Una pantalla LCD está formada por dos filtros polarizantes con filas de cristales líquidos alineadas perpendicularmente entre sí, de modo que al aplicar o dejar de aplicar una corriente eléctrica a los filtros, se consigue que la luz pase o no pase a través de ellos, según el segundo filtro bloquee o no el paso de la luz que ha atravesado el primero. El color se consigue añadiendo 3 filtros adicionales de color (uno rojo, uno verde, uno azul). Sin embargo, para la reproducción de varias tonalidades de color, se deben aplicar diferentes niveles de brillo intermedios entre luz y no-luz, lo cual se consigue con variaciones en el voltaje que se aplica a los filtros.
Al no requerir el uso de un único tubo de imagen, los monitores LCD tienen un tamaño, especialmente un fondo, mucho menor, haciéndolos ideales para ordenadores portátiles o en entornos donde escasea el espacio. El consumo de estos monitores es también mucho menor, de ahí su adecuación al mundo de los portátiles.
El parpadeo en las pantallas LCD queda sumamente reducido por el hecho de que cada celda donde se alojan los cristales líquidos está encendida o apagada, de modo que la imagen no necesita una renovación (refresco) sino que se enciende o se apaga. La geometría perfecta viene dada porque cada celda que contiene un cristal líquido se enciende o apaga individualmente, y por lo tanto no hay problemas de convergencia.
Los LCD tienen ciertas desventajas. El coste de fabricación de los monitores LCD es superior al de las pantallas CRT, no sólo por la tecnología empleada, sino también por su escasa implantación que hace que los volúmenes de fabricación sean pequeños. Puesto que la luz en los LCD's es producida por tubos fluorescentes situados detrás de los filtros, en vez de iluminar la parte anterior como en los monitores CRT, con una visión diagonal la luz pasa a través de los píxeles (cristales) contiguos, por lo que la imagen se distorsiona a partir de un ángulo de visión de 100º.
Las variaciones de voltaje de las pantallas LCD actuales, que es lo que genera los tonos de color, solamente permite 64 niveles por cada color (6 bit) frente a los 256 niveles (8 bit) de los monitores CRT, esta gama de colores es claramente insuficiente para trabajos fotográficos o para reproducción y trabajo con vídeo. Debido al sistema de iluminación con fluorescentes, las pantallas LCD muestran una menor pureza del color, ya que muestran zonas más brillantes que otras, lo que da lugar a que una imagen muy clara o muy oscura afecte a las áreas contiguas de la pantalla.
Un problema adicional que afecta a la calidad de imagen en las pantallas LCD vienen dada por el funcionamiento actual de las tarjetas gráficas y las pantallas LCD: la tarjeta gráfica recibe una señal digital del procesador y la transforma a analógica para enviarla a la salida de señal; por su parte la pantalla LCD recibe esa señal analógica y la debe transformar a señal digital, con la lógica perdida que se produce entre ambas transformaciones. Las pantallas LCD actuales se conectan a puertos analógicos VGA, pero se espera que en un futuro todas las tarjetas gráficas incorporen también una salida digital.
2.2.2. TARJETA DE VÍDEO
Funcionalmente puede considerarse como una interfaz de salida de datos. Un adaptador de vídeo típico para PC's constará de una placa de circuito impreso con un conector de 9 pines al que se conecta el cable del monitor (hay monitores que no cumplen esta característica), y un conector de ranura de 2 x 31 contactos que se inserta en una de las ranuras de expansión (slots) de la placa base del PC.
Adaptador de Video
Figura 2.4. Adaptador de Vídeo
La elección de un subsistema gráfico (actualmente el estándar SVGA), nos permitirá controlar la resolución (numero de píxeles visualizados en una pantalla), la cantidad de colores simultáneos observados. La cantidad de memoria de la tarjeta de vídeo, nos determina la máxima resolución y los colores posibles en los que podemos trabajar (siempre condicionado al tipo de monitor). Un monitor SVGA autentico debería soportar como mínimo 1024x768, si bien hoy en día, lo normal (al menos a partir de 15 pulgadas) es que soportara hasta 1280x1024. En tamaños superiores (17, 19 o 21 pulgadas) resoluciones como 1600x1200 deberían ser soportadas.
En detalle la tarjeta gráfica sería:
Información de Atributos
Código del Gráfico
Sincronización de la información

Figura 2.5. Diagrama de bloques de una tarjeta gráfica
En lo que sigue nos ocuparemos de describir los componentes de un adaptador, cuya estructura se muestra en la fig. 2.6.
En primer lugar, se dispondrá de un buffer de vídeo o memoria de refresco, en esencia una memoria RAM (VideoRAM) que almacenará la información que va a ser presentada por pantalla. Esta RAM puede direccionarse desde la CPU, por lo que funcionalmente ésta trabaja con aquella de la misma forma que con la Memoria Principal. Actualmente tenemos dos grandes grupos: las tarjetas basadas en VRAM y las basadas en DRAM. Las VRAM son chips de memoria de doble puerto, que permiten al procesador transferir datos a la memoria, mientras simultáneamente la tarjeta de vídeo transfiere información de la memoria al monitor. En contraste, las DRAM son chips de puerto simple por lo que los recursos se deben repartir entre el procesador y la propia tarjeta. Por todo ello podemos concluir que las tarjetas con VRAM alcanzan, generalmente, mayores prestaciones.
La cantidad de memoria que necesitan los datos que constituyen una imagen, depende del numero de bits que sean necesarios para codificar un color, de la resolución en la que estemos trabajando, y del hecho de que la aplicación este trabajando con simple o doble buffer de vídeo.
El controlador del CRT (CRTC) se encargará de actualizar, o refrescar, la información presentada en la pantalla continuamente con los contenidos de la RAM de vídeo, con objeto de producir la apariencia de una imagen estable. Para ello, el CRTC genera las señales de sincronismo de barrido horizontal y vertical, y además incrementa un contador de direcciones de la RAM de vídeo a una velocidad sincronizada con las señales de barrido, para poder actualizar todo el contenido de la pantalla en un único ciclo de refresco, lo cual impone una limitación al tiempo de acceso a la RAM de vídeo. La RAM de vídeo posee dos caminos de acceso para datos, lo que permite simultáneamente el refresco de la pantalla y el acceso del procesador a ésta.
El CRTC realiza además otras funciones. Por ejemplo, determinar el tamaño y posición del cursor que se visualiza en pantalla, seleccionar la parte de la RAM de vídeo que se ha de presentar en pantalla, o detectar las señales producidas por el ratón o lápiz óptico.
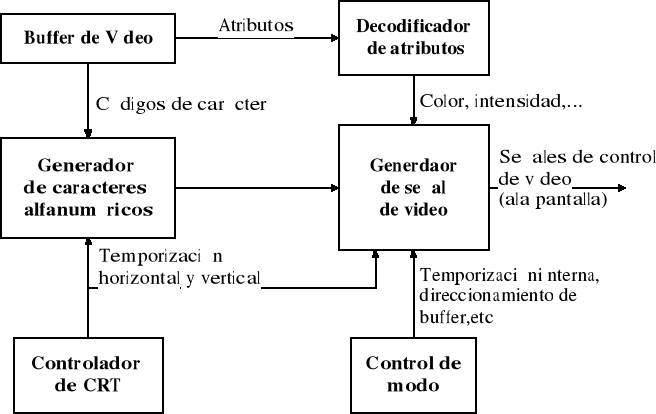
Figura 2.6. Componentes del sistema de vídeo de un PC
Los valores de refresco de pantalla suelen oscilar entre 70 y 100 Hz, por lo que una modificación de los contenidos de esta memoria por parte de un programa que esté ejecutándose en la CPU producirá un cambio inmediato de la presentación de la información en el monitor, respecto de la capacidad de percepción humana.
La capacidad del buffer de vídeo dependerá del adaptador de vídeo que manejemos. Suele ser usual disponer de RAM que contengan más de una pantalla, aunque el número de pantallas capaces de ser almacenadas vendrá determinado por la resolución y la escala de tonos o colores. Desde un punto de vista lógico puede considerarse a la RAM de vídeo dividida en planos, conteniendo cada plano un bit por cada píxel de la pantalla. Si P es el número de planos, 2P indicará la gama, número de tonos de gris o de colores por píxel. A medida que se aumenta la paleta de colores y la resolución, aumentarán las necesidades de capacidad de la RAM de vídeo. No es usual disponer de más de 1Mbyte de este tipo de memoria, si bien el abaratamiento de los costes de memorias hace atractivo el usar RAM de vídeo de alta capacidad, lo que provoca un crecimiento en la cantidad de información que debe recibir el sistema de vídeo del ordenador. Esto hará que aumente considerablemente el tiempo que pasa la CPU dedicada a procesamiento gráfico. Para liberar a la CPU de este tipo de tareas, surge la necesidad de incorporar un coprocesador gráfico en el sistema de vídeo, aunque esto encarecerá el coste de éste.
Además del CRTC y la RAM de vídeo, el adaptador de vídeo dispone de hardware que se encarga de realizar tareas complementarias. Así, el generador de caracteres alfanuméricos es una memoria ROM que permite la decodificación de los códigos ASCII de la RAM de vídeo en los patrones de puntos que forman los caracteres en la pantalla. Por último, un decodificador de atributos traduce otros datos almacenados en la RAM de vídeo en las señales que producen color e intensidad.
Cada carácter en pantalla, de forma similar al generado por una impresora matricial, está formado por una matriz de píxeles (character box píxel array), cuyo número varía tanto en horizontal como en vertical, dependiendo del adaptador de vídeo y del modo de resolución. La matriz de píxeles útil para cada carácter se denomina font (resulta al eliminar los píxeles de los márgenes, que no formarán parte del carácter). Un adaptador de vídeo que sólo permita la visualización por pantalla de los caracteres almacenados en su generador de caracteres se denominará alfanumérico, poseyendo una RAM de vídeo reducida. Pueden existir caracteres especiales almacenados en la ROM que permitan la formación de gráficos sencillos por composición los mismos, lo que dará al sistema de vídeo la posibilidad de trabajar en un modo semigráfico, de resolución limitada. Cuando el adaptador de vídeo dispone de RAM suficiente para especificar individualmente el estado de cada píxel, estaremos ante un adaptador de vídeo gráfico, que es lo usual en la actualidad. Este último además permitirá trabajar en modo alfanumérico también.
Por último, toda la información se enviará al monitor a través del generador de señal de vídeo. El rango de frecuencias que el adaptador de vídeo es capaz de enviar al monitor se conoce como ancho de banda, y es uno de los factores que determinan la nitidez de la imagen (normalmente será superior a 20 MHz). La información enviada puede ser digital o analógica, existiendo adaptadores de vídeo que pueden generar los dos tipos de señal.
Los programas diseñados para trabajar con adaptadores de vídeo pueden utilizar el conjunto de rutinas BIOS (Basic Input/Output System) de vídeo incluidas en la ROM del sistema, rutinas que proporcionan una interfaz con el hardware de vídeo, y que comprenden una serie de herramientas simples para realizar las tareas básicas de programación del vídeo: escribir cadenas de caracteres en pantalla, borrar la misma, visualizar un color determinado, etc. Los programas que utilizan estas rutinas se denominan compatibles a nivel del BIOS, por utilizar el mismo código máquina que éstas. Este tipo de compatibilidad confiere portabilidad a los programas que hacen uso de ella (si hablamos de PC's, claro), si bien puede producir lentitud en la ejecución de éstos, puesto que las rutinas del BIOS pueden ser poco rápidas y simples. Sin embargo, en determinados adaptadores será posible que el software no utilice las rutinas del BIOS y que tome control directamente sobre el hardware del adaptador, lo que redundará en beneficio del rendimiento de la aplicación gráfica. Esto se denomina compatibilidad en el ámbito de registros.
En la siguiente tabla una tabla se puede comprobar la cantidad de memoria necesaria para mostrar en pantalla los colores y resoluciones que se desea, junto con el tamaño de monitor recomendado para verlo.
| Resolución | 1 Mb | 2 Mb | 4 Mb | Tamaño Monitor |
| 1600x1200 | -- | 256 | 65.536 | 21" |
| 1280x1024 | 16 | 256 | 16´7 millones | 19/21" |
| 1152x882 | 256 | 65.536 | 16´7 millones | 19/21" |
| 1024x768 | 256 | 65.536 | 16´7 millones | 17" |
| 800x600 | 65.536 | 16´7 millones | 16´7 millones | 15" |
| 640x480 | 16´7 millones | 16´7 millones | 16´7 millones | 13/14" |
En realidad el ojo humano no puede distinguir 16´7 millones de colores, pero es sólo una cifra que indica el número de bits que estamos manejando. Por ejemplo, para 65.536 necesitaremos 16 bits (2 elevado a 16 es 65.536) . También podemos tener imágenes en 32 bits: 24 bits para los 16´7 millones de color y otros 8 para el canal alfa (para las transparencias). Pero apenas se percibe el cambio de 16 a 24 bits más que en una diferencia de velocidad en el refresco de los gráficos.
2.2.3. CICLO DE REFRESCO DE LA PANTALLA
Ya hemos dicho que la imagen de vídeo se refresca de una manera cíclica, con una frecuencia de 60 a 140 Hz. dependiendo de la configuración del sistema de vídeo. Durante cada ciclo de refresco, el haz de electrones barre la pantalla en forma de zig-zag, como se muestra en la fig.2.7., comenzando en el lado izquierdo de la línea horizontal más alta del raster. Después de barrer una línea de izquierda a derecha, el haz se sitúa en el comienzo de la siguiente línea, hasta que toda la pantalla ha sido barrida; entonces, el haz vuelve a la esquina superior izquierda de la pantalla y el ciclo se repite. Se denominará frecuencia horizontal a la inversa del tiempo requerido para que el haz trace una línea horizontal sobre la pantalla. Frecuencia vertical, o tasa de refresco, será la inversa del tiempo que se necesita para llenar la pantalla de líneas. Ambas se expresan habitualmente en KHz. Los monitores están diseñados para una o más frecuencias específicas tanto en horizontal como en vertical. También los adaptadores de vídeo están diseñados para frecuencias específicas, por lo que ambos deben ser compatibles.
Figura 2.7. Trayectoria del haz de electrones en un barrido completo
La tasa de refresco deberá tener en cuenta la persistencia o duración de la luminiscencia de los puntos de fósforo excitados por el haz de electrones. Una lenta tasa de refresco relativa a una pantalla de persistencia determinada producirá el efecto de parpadeo (flicker), con el que da la impresión de observar una intermitencia rápida en la pantalla, lo que se solucionará, lógicamente, aumentando la tasa de refresco. Los fósforos de larga persistencia reducen el parpadeo de la imagen, pero causan imágenes fantasma, visibles hasta un cierto tiempo después de oscurecerse la zona afectada de la pantalla. Además, los fósforos de alta persistencia son menos brillantes que los de baja persistencia, generando imágenes con poco contraste.
Al principio de cada línea el haz se activa como respuesta a la señal de activación de pantalla (Display Enable) que genera el CRTC. Cuando el haz barre de izquierda a derecha, a través de la línea, el hardware de vídeo utiliza el contador de direcciones del CRTC para leer una secuencia de bytes de la RAM de vídeo. Se decodifican los datos y se utilizan para controlar las señales de color y brillo enviadas al monitor. Cuando el haz barre a través de la pantalla, su color y brillo varían como respuesta a estas señales. Cerca del borde derecho de la pantalla, el CRTC desactiva la señal de activación de pantalla, dejándose de visualizar datos y de leer en la RAM de vídeo. Entonces el CRTC genera una señal de sincronismo horizontal que hace que el haz se desvíe hacia la izquierda y abajo hasta el comienzo de la siguiente línea horizontal. Nuevamente se pone en ON la señal de activación de pantalla y se repite el proceso para la nueva línea. Una vez que se han barrido todas las líneas horizontales, la señal de activación de pantalla se pone en OFF y el CRTC genera una señal de sincronismo vertical que desvía el haz hasta el borde superior izquierdo de la pantalla.
Al comienzo y final de cada línea, así como en los bordes inferior y superior de la pantalla hay un cierto margen sin iluminar, con objeto de proporcionar un margen de error en el raster, de tal forma que no se pierdan datos en los bordes de la pantalla (ver fig. 2.8.). Hay sistemas que permiten al usuario variar estos márgenes desde el propio monitor.
Figura 2.8. Márgenes
La técnica de formación de la imagen en la pantalla expuesta hasta ahora se denomina modo no entrelazado (non interlaced), dibujándose toda la pantalla en una sola pasada. Otra alternativa consiste en utilizar modo entrelazado (interlaced), con se dibuja la pantalla en dos pasadas. En la primera, se dibujan las líneas impares y en la segunda las pares, lo que aparentemente doblaría la tasa de refresco. Dependiendo del tipo de monitor, de la luz ambiente, y de la percepción individual, este entrelazado a menudo provoca sensación de parpadeo, sobre todo a corta distancia (efecto de falso parpadeo), por lo que sería deseable utilizar un modo de vídeo no entrelazado, si bien esto último representa una solución más cara (comparando dos sistemas de vídeo equivalentes en las demás características). Si bien este parpadeo no tiene nada que ver con la frecuencia de barrido vertical que soporte como máximo el monitor, a más frecuencia menos parpadeo, aunque por mucha frecuencia el efecto de un monitor entrelazado persistirá. El entrelazado permite una mayor resolución de pantalla con un ancho de banda menor, y tener un ancho de banda menor suele ser deseable.
Ahora bien el modo entrelazado o no entrelazado, por propia definición, es un aspecto que no afecta a resoluciones iguales o inferiores a las 600 líneas verticales, por lo que los modos 640x480 y 800x600 no se ven influidos. Si a estas resoluciones parpadea el monitor es que dicho monitor es de mala calidad. El primer modo que si se ve influido es el 1024x768. Aquí es cuando uno debe plantearse las diferencias entre monitor entrelazado o no. Hoy en día casi todos los monitores son no entrelazados. El problema es que lo de entrelazado o no entrelazado, no es una característica que englobe a todas las resoluciones de un monitor. Así, puede ser que un monitor sea no entrelazado para resoluciones como la 1024x768 pero si lo sea para la 1280x1024 o la 1600x1200. Por lo tanto lo ideal es que sea no entrelazado para todas las resoluciones que soporte superiores a la 800x600.
Haz que tener en cuenta, es que lo de entrelazado o no, no solo afecta al monitor, sino también a la tarjeta gráfica. Una tarjeta puede ser que a ciertas frecuencias altas (por ejemplo 75 Hz) en ciertas resoluciones sólo pueda trabajar en modo entrelazado.
2.2.4. TARJETAS DE VÍDEO PARA PC's
Cuando se introdujo el PC en 1981, IBM ofrecía dos tipos de adaptadores de vídeo: el adaptador de pantalla monocromo (MDA) y el "Color Graphics Adapter" (CGA). MDA se diseñó para utilizar un monitor monocromo alfanumérico de 80 x 25 caracteres de texto, con una matriz de 720 x 350 píxeles, disponiendo de una RAM de vídeo de tan sólo 4K (4.000 caracteres). CGA soporta un monitor RGB o de televisión, permitiendo visualizar tanto información gráfica (640 x 200 píxel, con posibilidad de usar 2 colores, ó 320 x 200, con 4 colores) como alfanumérica (40 x 25 ó 80 x 25 caracteres) y disponiendo de una RAM de vídeo de 16K, lo que permitía almacenar 8 ó 4 pantallas según el submodo alfanumérico con el que trabajásemos; esto permitía una capacidad alta de scroll. Un carácter en MDA está formado por una matriz de 9 x 14 píxeles (su font es de 7 X 11), mientras que en CGA es de 8 x 8. Por eso era preferible la utilización de MDA cuando se trabajaba en modo texto, aunque las posibilidades de representación de caracteres en ésta eran limitadas, al no disponer más que de 256 caracteres fijos almacenados en su ROM de vídeo, sin permitir al usuario definirse su propio juego de caracteres. Como las señales de vídeo generadas por ambos adaptadores son incompatibles, no se podía hacer uso de las ventajas de éstos simultáneamente (mayor resolución en modo texto de MDA y capacidad de generar gráficos en color de CGA), a menos que se instalasen dos sistemas de vídeo completos (incluido monitor) sobre la misma CPU.
Para resolver el problema de visualizar texto de buena calidad y gráficos en el mismo monitor, en 1982 se presentó el adaptador “Hercules Graphics Card” (HGC), que permitía el uso de texto y gráficos en el mismo monitor monocromo compatible con MDA y con resolución de 720 x 348 píxeles, lo que representaba una solución económica y relativamente eficiente. Actualmente se dispone de una gran cantidad de software para este adaptador. HGC era capaz de emular mediante software especial a un adaptador CGA. MDA y HGC sólo disponían de un juego de caracteres predefinido en su ROM de vídeo, y cómo los caracteres alfanuméricos se pueden presentar en pantalla mucho más rápidamente que los caracteres gráficos, era deseable disponer de un adaptador que dispusiera de varios juegos de caracteres. El adaptador Hercules Graphics Card (HGC+), aparecido en 1986, disponía ya de varios juegos de caracteres en su RAM de vídeo.
Una solución diferente al problema de visualizar texto nítido y gráficos de alta resolución fue aportada por la aparición de los adaptadores “Professional Graphics Controller” (PGC) y “Enhanced Graphics Adapter” (EGA), en 1985. PGC fue orientado hacia el mercado del CAD, intentando competir con los adaptadores diseñados para work- stations, proporcionando una relación de aspecto de 4:3 sobre una resolución de 640 x 480 y generando hasta 256 colores. Sin embargo, PGC era un adaptador caro que no llegó a popularizarse, sobre todo después de la introducción del adaptador VGA, que veremos más adelante. Por otra parte, el adaptador EGA puede configurarse para emular a los adaptadores MDA y CGA, con capacidad de generar gráficos en un monitor monocromo, aumentando la resolución de CGA al permitir imágenes gráficas o alfanuméricas de 16 colores con resolución de 640 x 350. EGA incorpora una RAM de vídeo de 64K, con posibilidad de instalar 192K más, para aprovechar todas sus prestaciones. También usa una matriz de caracteres de 8 x 14 píxeles, cercana a los 9 x 14 de MDA y bastante superior a los 8 x 8 de CGA. Así, por primera vez se disponía de textos legibles en modo gráfico. Esto ha hecho de EGA un estándar del hardware de vídeo, sobre todo después de la aparición del adaptador EGA Plus en 1988, que permite 640 x 480 píxeles y hasta modos superiores de resolución. Utiliza una matriz de caracteres de 9 x 14, dispone de una RAM de vídeo de 256K, y emulación de los estándares anteriores, MDA, CGA y Hércules.
En 1987 apareció el adaptador “Hercules InColor”, versión en 16 colores de la HGC+ con su misma resolución, y naturalmente compatible con ésta. Permite además conectarse a un monitor de color compatible con EGA, ya que presenta las mismas capacidades de color que ésta (16 colores de una paleta de 64).
Los anteriores adaptadores, salvo PGC, generan señales de vídeo RGB o monocromas digitales. Los adaptadores de vídeo diseñados posteriormente generan señales analógicas, lo que permite utilizar una gama de colores mucho mayor, o bien ambos tipos de señales, para poder utilizar distintos tipos de monitores. El adaptador “Multicolor Graphics Array” o MCGA (integrado en los modelos 25 y 30 de la serie PS/2 de IBM) sólo puede utilizar monitores analógicos; tiene una resolución máxima de 640 x 480 en el modo de 2 colores, y capacidad de visualizar 256 colores de una paleta de 262.144 (256K colores), trabajando con la más baja resolución, 300 x 200. También puede trabajar con un monitor monocromo analógico, pudiendo presentar hasta 64 tonos de grises. Es compatible parcialmente con CGA, al disponer de un modo de emulación de ésta.
El adaptador “Video Graphics Array” (VGA), integrado en los modelos 50, 60 y 80 de la serie PS/2, alcanza resoluciones de 720 x 400 en modo texto y 640 x 480 en modo gráfico (el modo gráfico de baja resolución es de 320 x 200). Dispone de 17 modos de funcionamiento, teniendo una interfaz de programación que la hace compatible con EGA casi totalmente. Como en el caso de MCGA, puede generar al mismo tiempo 256 colores de una paleta de 262.144. Puede utilizar los monitores analógicos en color o monocromos compatibles con MCGA, pues genera la misma señal RGB que ésta. Tiene una RAM de vídeo de 256K, lo que permite mantener en memoria hasta 8 pantallas, ya que los caracteres se construyen con una matriz de 9 x 16 píxeles en modo texto, o bien 8 x 16 en el modo gráfico. VGA puede emular todas las tarjetas estándar anteriores. Algunas mejoras sobre el estándar VGA han llevado a la realización del adaptador Super VGA, compatible con el anterior y con una resolución máxima de 800 x 600 con 16 colores. El estándar Super VGA es la recomendación actual de VESA (Video Electronics Standard Association), agrupación de fabricantes formada para establecer y mantener una normativa para la realización de adaptadores de vídeo y monitores.
En 1987 se introdujo un nuevo estándar por IBM para su serie PS/2. Se trata del adaptador 8514/A, que ofrece 256 colores con una resolución de 640 x 480 de una paleta de 256.000, o bien 16 ó 256 colores con resolución de 1.024 x 768. Dispone además de coprocesador gráfico. De todos modos, IBM está intentando sustituir este estándar por la última implementación de adaptador de vídeo, el “Extended Graphics Array” (XGA), introducido a finales de 1990 en los modelos 90 y 95 de la serie PS/2. XGA es compatible con VGA y estándares anteriores, añadiendo a los modos de resolución VGA los siguientes: 1.024 x 768 píxeles con 256 colores en pantalla y 640 x 480 con 65.536 colores simultáneos. XGA incorpora 1M de RAM de vídeo y coprocesador gráfico. IBM propuso, durante 1991, la norma XGA a VESA.
Actualmente existen chips para tarjetas gráficas muy potentes, la mayoría de las veces con potencia de cálculo superior a la del procesador principal, pero también muy diferentes entre sí. Hace algunos años, no se le prestaba en absoluto atención a la calidad de la tarjeta VGA. Después, tras la aparición de la SVGA, fue el punto de partida a la hora de mejorar estas tarjetas, ya que, junto con la evolución de la tecnología en los monitores, cada vez soportaban mayores resoluciones al incorporar memorias entre 1 y 3 Mb.
Pero la auténtica revolución gráfica fue en el sector tridimensional, el 3D, donde se necesitan potencias de cálculo muy superiores que el microprocesador central no puede soportar. Fundamentalmente, lo que hace un chip 3D es quitar la labor del procesador de generar los triángulos y el relleno de texturas, haciendo que la tarjeta gráfica lo haga sola liberando al procesador de otras tareas. Con esto, se obtiene una mejora muy grande en lo que se refiere a la velocidad, y además se han incorporado multitud de efectos gráficos fáciles de usar por los programadores que mejoran sustancialmente la calidad de los gráficos.
Las placas de video se fabrican hoy día para buses PCI y AGP (estos buses permiten características como Plug and Play y Bus Mastering, ésta última para optimizar las operaciones de transferencia de la tarjeta). Estas tarjetas se suelen usar en ordenadores Pentium y equivalentes (como el K6 de AMD). Actualmente también para el bus USB.
2.2.5. TARJETAS ACELERADORAS
La tarjeta aceleradora es una placa de circuito impreso que amplía las capacidades del microprocesador principal de un equipo o lo sustituye por otro más rápido. La tarjeta aceleradora permite al usuario ampliar un sistema dotándolo de un microprocesador más rápido sin necesidad de sustituir las tarjetas, unidades, teclado o caja. Esto reduce sustancialmente el precio total del sistema
Las tarjetas gráficas con aceleración 3D son, básicamente, una unidad de proceso periférica que se encarga de realizar los cálculos necesarios para la representación tridimensional. De este modo, la CPU está libre para encargarse de otras tareas menos específicas, acelerando el conjunto. Estas tarjetas se componen generalmente de unos procesadores de tipo CISC (aquellos que no usan un conjunto reducido de instrucciones, como los RISC) conectados a un BUS y a unas memorias de alta velocidad. Los procesadores se encargan del trabajo de cálculo, utilizando las memorias de la tarjeta para almacenar los datos necesarios (como las texturas) y el BUS para comunicarse con la CPU. Son unas tarjetas específicas para la generación de gráficos en tres dimensiones.
Figura 2.9. Diagrama de bloques de una tarjeta aceleradora
Su funcionamiento es igual al de una tarjeta gráfica 3D en cuanto a la transmisión de datos del procesador principal al procesador gráfico, el almacenamiento en memoria de los datos y la transmisión al monitor por medio de la RAM de video, pero el procesamiento de los datos por el chip gráfico es mucho más complejo, pues al contrario que en las tarjetas gráficas 3D el proceso de representación no lo realiza el procesador principal.
Durante el proceso de representación, el procesador gráfico 3D aplica a la imagen una serie de texturas que se almacenan en la memoria de vídeo y realiza básicamente las siguientes operaciones sobre una imagen generada por el procesador:
-
Buffer de ocultación: se utiliza para ocultar las partes de la imagen que no están visibles por estar tapadas por otras. Este efecto se puede conseguir por software o por hardware, siendo más rápido por hardware.
-
Sombreado Gouraud: se utiliza para evitar el aspecto cuadrado de los objetos y dando así más sensación de profundidad.
-
Corrección de perspectiva: orienta adecuadamente las texturas sobre los polígonos
-
Mapeado MIP: pega las texturas sobre los polígonos y evita que al aumentar o disminuir el tamaño de la imagen, se ganen detalles. Para ello se almacenan texturas en varias resoluciones que luego se recuperan de la memoria gráfica en tiempo real.
-
Filtrado Bilineal: evita el aspecto difuso en las uniones de texturas y polígonos al acercar la imagen (el proceso que más recursos consume al procesador gráfico).
-
Filtrado Trilineal: tiene la misma función que el anterior pero mejora los resultados del anterior.
-
Alpha Blending: crea efectos de transparencias.
Al ser chips específicos, estos periféricos pueden encargarse de los gráficos de modo mucho más eficiente y con mejores resultados que las CPUs, aunque sean menos potentes. Mejor calidad de imagen, mejores efectos especiales, más suavidad y mayor precisión en la representación son algunas de las principales ventajas, pero no las únicas. Las tarjetas aceleradoras vienen siendo utilizadas en el campo profesional desde mucho antes que en el del entretenimiento, lo que nos da una pista de las posibilidades que este hardware ofrece.
El rendimiento de una tarjeta es, por decirlo de algún modo, su velocidad. Los fotogramas por segundo (fps) que nos puede ofrecer en pantalla. Esta velocidad es vital, pues un ratio inferior a 25 fps nos dará una imagen poco suave, a saltos y muy incómoda de observar. A una tarjeta 3D se le suele pedir un ratio de en torno a los 50-60 fps. Hay que fijarse muy bien en las velocidades que la tarjeta obtiene en las aplicaciones que nosotros queremos usar. El análisis del comportamiento de los distintos chips gráficos en distintas resoluciones es el más significativo a la hora de mirar su resolución. Por ejemplo, partamos de que el trabajo fundamental de una tarjeta es el generado y el rellenado o texturado de polígonos. Si vemos que un chip gráfico da rendimientos muy parecidos en resoluciones distintas, significa que su limitación o “cuello de botella” está en el cálculo de polígonos, mientras que en el rellenado de éstos puede ser buena. Si por el contrario el rendimiento va disminuyendo notablemente a medida que aumentamos la resolución, significa que la limitación de esa tarjeta viene dada por el rellenado de los polígonos y no en su generado. De ahí que tarjetas sin problemas a la hora de rellenar polígonos sean ideales para equipos muy potentes (de modo que la mayor parte de la generación de polígonos la soporte el micro) y que las que tienen su mayor potencial a la hora de generar polígonos sean las ideales para equipos con micros poco potentes que apenas puedan prestar ayuda.
Las tarjetas aceleradoras precisan una programación para aprovechar sus características. Por lo tanto, si un programa de ordenador no da las ordenes pertinentes, la aceleración no sirve de nada. Dado que cada fabricante quiere que esas aplicaciones le sean ordenadas de distinta manera, dicho fabricante normalmente proporciona un driver (un programa que actúa de interfaz entre la aplicación y la tarjeta) para facilitar el trabajo del programador. Dado que el fabricante no va a programar los drivers para las distintas aplicaciones del mercado, proporciona únicamente drivers para aquellos sistemas operativos que engloban aplicaciones (Windows, OS/2, etc...).
El termino aceleradora no engloba en si mismo ninguna especificación de los programas que acelera o no, es decir, dependiendo del chip acelerador, nuestra tarjeta acelerara más o menos cosas y más o menos rápidamente. Debemos disponer de un programa que sea capaz de decir que aplicación acelera y cual no.
Actualmente, en el mercado de consumo, existen 2 tipos de aceleradoras gráficas:
-
Las propias aceleradoras 3D, tarjetas independientes que sólo entran en funcionamiento cuando se ejecuta algún juego que necesite su funcionamiento. Estas tarjetas requieren una tarjeta 2D que se encargue de las tareas normales, con un único requisito de tener un mínimo 2 Mb. de memoria. Además, ambas suelen estar unidas con un cable externo.
-
Y luego están las tarjetas "híbridas" 2D/3D, que consisten en un único chip que se encarga tanto de las funciones 2D como de las funciones 3D de una aceleradora. Los últimos modelos que están apareciendo estos meses son realmente buenos y no tienen nada que envidiar a las aceleradoras 3D puras.
Las tarjetas gráficas tradicionales 2D son capaces de procesar imágenes 3D por emulación por software, aunque con resultados de baja calidad y con una desesperante lentitud, de modo que el cálculo y la generación de las imágenes en 3D las realiza el propio procesador, estando por tanto este demasiado ocupado para realizar otras operaciones, ralentizando todo el equipo.
Memoria: En las tarjetas 2D, la cantidad de memoria sólo influye en la resolución y el número de colores que dicha tarjeta es capaz de reproducir. Lo habitual suele ser 1 ó 2 Megas.
| Relación entre memoria y Resoluciones máximas | ||||
| Memoria | Máximas resoluciones y colores | |||
| 512 Kb. | 1024x768-16 colores | 800x600-256 colores |
|
|
| 1 Mb. | 1280x1024-16 colores | 1024x768-256 colores | 800x600-64k colores | 640x480-16,7M col. |
| 2 Mb. | 1280x1024-256 colores | 1024x768-64K colores | 800x600-16,7M colores | ídem |
16 colores = 4 bits.
256 colores = 8 bits.
64k = 65.536 colores = 16 bits
16,7 M = 16.777.216 colores = 24 bits.
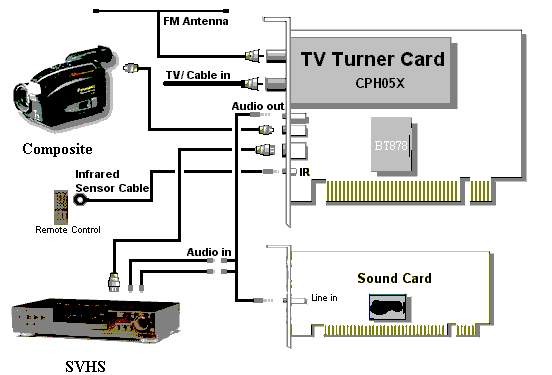
2.2.6. TARJETAS DE TELEVISIÓN
Consiste en un tarjeta que, colocada en un slot del ordenador, nos permite disfrutar de la televisión en una ventana de nuestro ordenador. Las aplicaciones que podremos darle a nuestro equipo son múltiples: desde captura de imágenes de la TV, hasta edición y salida a vídeo de nuestro producto retocado.
La tarjeta gráfica que se tenga ha de ser compatible con la tarjeta receptora de televisión. Por otra parte la tarjeta debe conectarse a una toma de antena, para poder sintonizar con claridad los canales.
Un esquema de las conexiones de una tarjeta de televisión sería la siguiente figura:
2.2.7. CÁMARAS DE VÍDEO
Las cámaras de vídeo han cobrado una gran importancia a raíz del boom de Internet. Una cámara de este estilo nos permitirá, desde mantener conferencias con nuestros amigos a mostrar nuestra vida a medio mundo a través de Internet.
Parámetros de importancia:
-
Resolución. Es el número de puntos que capta la cámara. Cuanto mayor sea, mejor. Una resolución habitual es la de 320x240 píxeles. Es posible que nos den dos resoluciones: para imagen fija y para vídeo.
-
“Frame rate”: Es el número de imágenes captadas por segundo. Existe una relación clara entre la forma de comunicar la cámara con el ordenador y el número de fps. Así, existen cámaras que se comunican vía puerto paralelo y solamente capturan 3 fps. Las cámaras que usan la conexión USB alcanzan entre 8 y 14 fps.
Es importante saber para qué se va a usar la cámara. El uso más habitual suele ser para mantener vídeo-conferencias. Debido a la lentitud de Internet, podemos estar casi seguros de que poco importa la calidad de las imágenes o los fps. De nada sirve poder mostrar 30 fps si solamente podemos transmitir 5 fps. En este caso, no es necesario disponer de una vídeo cámara excelente, puesto que no podremos usarla al límite de sus posibilidades. Si lo que queremos, por contra, es una captura de alta calidad, es conveniente invertir una cantidad de dinero superior para conseguir nuestros objetivos.
La conexión con nuestro ordenador, en el ámbito de compatibilidad y facilidad, es muy importante, la conexión USB la más aconsejable. Son interesantes también otras posibilidades tales como poder conectar nuestra cámara a una televisión o vídeo.
2.3. SISTEMA DE AUDIO
2.3.1. TARJETA DE SONIDO
La tarjeta de sonido es la encargada de convertir la información digital procesada por nuestro equipo (1s y 0s) en datos analógicos, o sonidos, para que sean reproducidos por unos altavoces conectados a la propia tarjeta de sonido.
El sonido es una señal analógica; puede tomar cualquier valor en un intervalo continuo. Los ordenadores son digitales; parece que trabajan con valores discretos. Las tarjetas de sonido usan un dispositivo conocido como convertidor analógico a digital (A/D o ADC) para convertir los voltajes correspondientes a las ondas de sonido analógico en valores digitales o numéricos los cuales pueden ser guardados en memoria. Similarmente un convertidor digital analógico (D/A o DAC) convierte valores numéricos en un voltaje analógico el cual puede ser reconducido a un altavoz, produciendo sonido.
Se encargan de digitalizar las ondas sonoras introducidas a través del micrófono, o convertir los archivos sonoros almacenados en forma digital en un formato analógico para que puedan ser reproducidos por los altavoces. Los sonidos que puede percibir el oído humano abarcan las frecuencias de 20 a 20.000 Hz.
La tarjeta de sonido recorre estas ondas tomando muestras del tipo de onda (de su frecuencia), esta operación se realiza con valores variables de muestreo, desde 8.000 hasta 44.100 Hz, a mayor frecuencia de muestreo mayor será la calidad de la grabación. Y del nivel sonoro de esta onda, esta información se guarda en 8 bits (28 = 256 niveles de sonido) o en 16 bits (216 = 65.536 niveles de sonido). Y en un canal o Mono o dos canales o Estéreo.
La calidad telefónica correspondería a 11.025 Hz, 8bits y Mono. La calidad de la radio a 22.050 Hz, 8 bits y Mono, ocupando el archivo el doble que el primero. Y la calidad del CD a 44.100 Hz, 16 bits y Estéreo, ocupando el archivo 16 veces más que el primero. El proceso de conversión de analógico a digital, conocido como muestreo (sampling), introduce algunos errores. Dos factores son fundamentales en determinar con qué fidelidad la señal de muestra representa a la original.
La frecuencia de muestreo (sampling rate) es el número de muestras hechas por unidad de tiempo (generalmente expresado en muestras por segundo o hertzios). Una frecuencia de muestreo baja genera una representación de menos calidad de la señal analógica. El tamaño de muestreo (sample size) es el rango de valores usados para representar cada muestra, generalmente expresado en bits. Cuanto mayor sea el tamaño de muestra de mayor calidad será la señal digital. Las tarjetas de sonido usan comúnmente muestras de 8 o de 16 bits y frecuencias de muestreo desde 4000 hasta 44000 muestras por segundo. Las muestras pueden estar contenidas en un canal (mono) o en dos (estéreo).
El proceso de reproducción sigue los mismos pasos pero en sentido contrario.
Muchas tarjetas de sonido poseen capacidades MIDI; esto significa que en un chip de la tarjeta, sintetizador, se encuentran almacenadas las características de diferentes instrumentos musicales, y la grabación o reproducción de un sonido se hace en referencia a éstos y las notas musicales correspondientes.
Igualmente, los sonidos analógicos introducidos por medio de un micrófono, un equipo de música conectado a LINE-IN, o un instrumento musical conectado al puerto MIDI, son transformados en información digital para que sea reconocida y procesada por el equipo. Además la tarjeta de sonido es la encargada de reproducir, por medio de los altavoces conectados a ella, las pistas musicales de un Compact Disc de música insertado en nuestra unidad de CD-ROM. Para ello, el CD-ROM y la tarjeta de sonido deben estar conectados por un cable.
Una tarjeta de sonido necesita una dirección por donde recibe las órdenes (
puerto), una interrupción para llamar la atención al microprocesador (IRQ
) y un camino (canal) por donde transferir datos (DMA).
La síntesis de FM es una técnica antigua para producir sonido. Se basaba en combinar diferentes formas de onda (por ejemplo sinusoidal, triangular, cuadrada). La síntesis de FM es más fácil de implementar en hardware que la conversión D/A, pero es más difícil de programar y menos flexible. Algunas tarjetas de sonido traen la síntesis de FM para conservar la compatibilidad con otras tarjetas y software anteriores.
La síntesis de tabla de onda (WaveTable) combina la flexibilidad de la conversión D/A con la capacidad de múltiples canales de la síntesis de FM. Con este esquema las voces digitalizadas pueden ser cargadas en una memoria dedicada, y después reproducidas, combinadas, y modificadas con pocos recursos de la CPU. La mayoría de las tarjetas de sonido proporcionan la capacidad de mezclar, combinar señales de diferentes fuentes de entrada y controlar los niveles de ganancia.
MIDI significa Musical Intrument Digital Interface (interfase digital para instrumentos musicales), y es el hardware estándar y el protocolo software que permite a los instrumentos musicales comunicarse con cualquier otro. Los eventos enviados a través de un bus MIDI también pueden ser guardados como ficheros MIDI para editarlos más tarde y reproducirlos. Algunas tarjetas de sonido traen un interfase MIDI. Las que todavía no pueden reproducir ficheros MIDI usan las capacidades de la placa de la tarjeta de sonido.
Una tarjeta de sonido también es capaz de manipular las formas de onda definidas; para ello emplea un chip DSP (Digital Signal Processor), que le permite obtener efectos de eco, reverberación, coros, etc. Las más avanzadas incluyen funciones ASP (Advanced Signal Processor), que amplía considerablemente la complejidad de los efectos. Por lo que a mayor variedad de efectos, más posibilidades ofrecerá la tarjeta.
![]()
Figura 2.10. Diagrama de bloques de la Tarjeta de Sonido
Haciendo un repaso por la historia de las tarjetas de sonido, nos damos cuenta que muchos consideran a la Empresa “Creative Labs” como la más avanzada en el campo del sonido, pero no es así. Todo, probablemente, comenzó con la aparición en el mercado de una tarjeta casi olvidada: AdLib. Esta tarjeta disponía de síntesis FM, es decir, síntesis por modulación de frecuencias, una tecnología inventada por el MIT en los años 60. Con esa capacidad, sólo se podía reproducir música desde secuenciadores MIDI, o reproducir la música y efectos de los juegos.
Tras la aparición de la tarjeta AdLib, vino la tarjeta Sound Blaster (SB) de la casa “Creative Labs”, totalmente compatible con la anterior, pero que además de la síntesis FM, incorporaba la posibilidad de grabar y reproducir audio digital (en 8 bits). Esto permitía a los programadores de juegos usar sonidos reales (voces, ruidos, etc) como efectos especiales de sus juegos. Esta espectacularidad está subrayada por su pomposo nombre (en inglés-americano). Creative se hizo con el mercado, consiguiendo desde entonces ser el estándar de hecho: todas las tarjetas que se precien deben ser compatibles con la Sound Blaster, ya que todos los fabricantes de juegos y otros software programan para este sistema. La Sound Blaster Pro ya funcionaba en estéreo.
En 1989 “Turtle Beach” (TB) sacó al mercado su Turtle Beach Multisound. Este no era un producto orientado al mercado doméstico, como los anteriores, sino que su elevado precio (unas 140.000 Pts.), y sus avanzadas características (incorporaba un chip DSP “Motorola” 56000 a 20 Mips) la dirigían hacia un mercado de audio profesional. Entre sus mejores características destacan que no usaba la lamentable síntesis FM, sino una excelente síntesis PCM (wavetable) incorporando un Chip de la empresa “EMU Systems”, una de las mejores empresas de sintetizadores y samplers para el mercado musical profesional. Pero si el sonido MIDI era inmejorable, en cuanto al audio tampoco se quedaba corta, ya que permitía la grabación y reproducción de audio a 16 bits, con unos buenos conversores DAC y DCA, proporcionando por lo tanto un bajísimo nivel de ruido y poca distorsión armónica. De lo que no se preocuparon fue de proveer compatibilidad con los juegos que usaban síntesis FM.
La famosa “Gravis Ultrasound” (GUS) fue el primer intento de fabricar un sampler para el mercado doméstico. Los usuarios de Sound Blaster que escuchaban una GUS se arrepentían de su compra. Para mejorar el sonido, la GUS disponía de una memoria RAM de 256 Kb que permitía almacenar grabaciones de instrumentos reales (sistema Wavetable). Pero esta tarjeta tenía un problema: aunque podía reproducir sonido de 16 bits, sólo podía grabarlo a 8 bits. Por ello, no era utilizable para la grabación de audio digital de calidad, aunque en el campo MIDI estaba entre la SB y la Multisound. Este defecto fue subsanado varios años después, con las versiones posteriores Ultrasound Max y Ultrasound Ace., que además traían ya 1 Mb de RAM.
Con la Sound Blaster 16, el mercado del audio a 16 bits se popularizó, haciéndolo asequible al mercado doméstico, pero sin ofrecer la alta calidad de la Multisound (lógico si se desea abaratar costes). Por otro lado, la SB 16 mantenía la misma síntesis FM de la SB Pro, por lo que musicalmente, su valor seguía siendo escaso. Antes de la Sound Blaster, “Media Vision” había fabricado la Pro Audio Spectrum (PAS), con sonido de 16 bits, aunque fue la primera la que dominó el mercado. Creative sacó una versión ASP de la Sound Blaster, que contenía un chip de proceso digital de señal (Avanced Signal Processor), que aún no se atrevían a llamar DSP (Digital Sound Processor, como la Multisound). Este ASP permitía cierta mejora al añadir efectos de Reverberación y 3D, además de aportar compresión de ficheros de audio (wav).
La fidelidad de reproducción MIDI que aportaba la GUS motivó que, con el tiempo, varias marcas se plantearan sacar al mercado tarjetas con tecnología similar. La Orchid Wave 32 entre otras, y las empresas de instrumentos musicales ya habían desarrollado tarjetas de alta calidad (especialmente la excelente Roland RAP-10 y la Ensoniq Soundscape). La tecnología wavetable de las demás tarjetas usaban sonidos (formas de onda) grabados en memoria ROM, en lugar de usar memoria RAM como la Gravis, con lo cual no se podía modificar los sonidos a voluntad del usuario. Sin embargo, implementaban los 128 sonidos del General MIDI (GM) y el General Standard (GS), incluyendo varios bancos de sonidos de batería y percusión. Con estas tarjetas, escuchar un buen fichero MIDI es ya una delicia.
En otro nivel más avanzado, la Digidesign Sample Cell ofrece la calidad de los samplers profesionales, e incluso mejores prestaciones. La diferencia está en el precio (más de 230.000 pts), a diferencia del medio millón que costaba un sampler en esa época. Aunque ahora hay algunos samplers de 150.000 pts, la Sample Cell aporta mayor calidad: 8 salidas de sonido independientes, edición súper completa y sofisticada de las muestras de onda, 8 Mb de RAM ampliables a 32, trae 2 CD-ROM de muestras de altísima calidad... en fin, un producto totalmente profesional.
Para presupuestos más limitados en la tarjeta de sonido, la Turtle Beach Maui ofrece por unas 40.000 pts el mismo sistema, trae 2 Mb de ROM con los sonidos General MIDI y permite llegar a 4 Mb de RAM, con casi 200 parámetros para edición de los bancos de sonidos. Se puede adquirir un puñado de CD-ROMs de muestras de calidad especialmente preparadas para Maui. Tiene la salida estéreo habitual, pero no dispone de entrada para digitalizar sonido. Así pues, debe usarse en combinación con otra tarjeta de 16 bits.
Creative también quiso copar el segmento doméstico de este mercado, y fabricó, entre otras, la tarjeta Sound Blaster 32 PnP, que disponía de sonido wavetable en 1 Mb de ROM, con el sintetizador de la EMU 8000, de la famosa empresa “EMU Systems”, que acabó comprada por Creative. Además, de la síntesis FM, efectos de reverberación y coro, polifonía de 32 voces, compatible General Midi, y añade 2 zócalos para añadir RAM en SIMMs de 30 contactos (hasta 28 Mb), con la tecnología de sampling que denomina “Sound Fonts”. Asimismo, admite grabación y reproducción simultánea de audio a disco duro, es decir, son Full Duplex. Esto es importante para usar programas de audio multipista, ya que mientras grabas una toma nueva, puedes escuchar lo que habías grabado antes.
Después vino la Sound Blaster AWE (Avanced Wave Effects ) 32 PnP, que añade a la SB 32 sonido 3D, y 512 Kb de RAM para Sound Fonts, para lo que incluye software, además del secuenciador MIDI Orchestrator Plus.
En el mundo de los ordenadores compatibles el estándar en sonido lo ha marcado la empresa “Creative Labs” y su saga de tarjetas Sound Blaster. Si escogemos una tarjeta que no sea de esta marca, y queremos ejecutar todo tipo de software es importante comprobar que sea SB compatible a nivel de hardware, y si así es, informarnos de con que modelo es compatible.
Otro factor a tener en cuenta es si la tarjeta admite la modalidad full duplex, es decir si admite grabar y reproducir a la vez, o lo que es lo mismo, si puede procesar una señal de entrada y otra de salida al mismo tiempo. Esto es importante si queremos trabajar con algún programa de videoconferencia.
También es importante el soporte de MIDI. Este es el estándar en la comunicación de instrumentos musicales electrónicos, y nos permitirá reproducir la partitura generada por cualquier sintetizador y a la vez que nuestra tarjeta sea capaz de atacar cualquier instrumento que disponga de dicha entrada. Hay que tener claro que el formato MIDI realmente no graba el sonido generado por un instrumento, sino sólo información referente a que instrumento estamos tocando, que nota, y que características tiene de volumen, velocidad, efectos, etc..., con lo que el sonido final dependerá totalmente de la calidad de la tarjeta.
Otro punto importante es la memoria. Esta suele ser de tipo ROM, y es utilizada para almacenar los sonidos en las tarjetas de tipo “síntesis por tabla de ondas”. Este tipo de tarjetas nos permiten almacenar el sonido real obtenido por el instrumento, con lo que la reproducción gana mucho en fidelidad. Cuanta más memoria tengamos, más instrumentos será capaz de guardar en ella y mayor será la calidad obtenida. En las tarjetas de síntesis FM este dato no es importante.
Es habitual leer que una tarjeta marcada como “32”, por ejemplo, la Sound Blaster 32, esta tarjeta no es de 32 bits, sino de 16 bits, es decir, pueden reproducir y grabar sonido digitalizado a 16 bits. El número 32 se refiere a la polifonía, es decir, el número de notas musicales que puede tocar simultáneamente el sintetizador interno. Por lo tanto las tarjetas marcadas como 64 no son tarjetas de 64 bits. De hecho, los estudios de grabación profesionales no usan más de 20 bits en sus equipos de mayor calidad. Sólo una de las tarjetas de sonido descritas tiene más de 16 bits: la Turtle Beach Pinnacle, con 20 bits.
Haciendo una tabla de las diferentes tarjetas podemos ver su polifonía y el número de bits que poseen:
| Tipo de tarjeta | Polifonía | Número de bits |
| Típica FM (compatible SB 16) | 20 | 8 ó 16 |
| Estándar GM (General MIDI) | 24 | 16 |
| Tipo Wavetable (estilo SB 32) | 32 | 16 |
| Maxi Sound Home Studio, SB AWE 64 | 64 | 16 |
| Turtle Beach Pinnacle | 64 | 20 |
También es falso que una tarjeta etiquetada con 32 signifique que pueda reproducir 32 instrumentos simultáneos. Lo que quiere decir es que puede tocar 32 notas simultáneas. Un piano, por ejemplo, puede estar sonando con 8 notas a la vez (un acorde complejo), la guitarra tiene 6 cuerdas que pueden sonar todas a la vez, y la percusión puede llevar 4, 6 u 8 notas simultáneas. Así una composición interpretada por piano, batería, bajo, guitarra, y sección de metales puede ocupar más de 24 voces de polifonía. Lo que sí es cierto es que pueden usarse hasta 16 instrumentos diferentes a la vez, repartiéndose entre ellos la polifonía disponible. En un equipo General MIDI, éstos 16 instrumentos pueden elegirse de un banco de 128 sonidos de todo tipo, mientras que la percusión dispone de 10 kits diferentes.
El sonido 3D que ofrecen algunas tarjetas intenta dar al oyente la impresión de sonido envolvente. En el cine, el Sistema Surround está basado en el uso de varios altavoces situados en diferentes puntos de la sala. Sin embargo, obtener este efecto con sólo dos altavoces es mucho más complejo.
En un estudio de grabación, cuando se quiere “situar” unos sonidos en el frente y otros en el fondo, se juega con dos parámetros: el volumen (cuanto más alto, más cerca), y la reverberación (una especie de eco), que se produce cuando los sonidos están más alejados del oyente. Así se intenta distinguir entre sonidos cercanos y sonidos lejanos. De un modo similar, algunos receptores de TV estéreo, cuando reproducen un programa grabado en mono, simulan el estéreo retrasando ligeramente la señal de uno de los dos canales. Esto da un efecto pseudo-estéreo que resulta más agradable que el sonido mono.
En los años 70, después del desarrollo del sonido de alta fidelidad (hi-fi), se intentó dar un paso más con la cuadrafonía: se trataba de usar cuatro altavoces (con sus cuatro amplificadores correspondientes), colocados en las esquinas de un cuadrado, con el oyente en el centro. Con este sistema, podíamos “situar” un sonido en cualquier lugar de la habitación, manipulando su volumen independientemente en cada uno de los 4 canales. Sin embargo, este efecto resulta muy caro: no sólo se necesitan 4 altavoces y 4 amplificadores, sino que también la fuente de sonido (cassette, disco compacto...) tenía que estar grabado en cuadrofónico en vez de estéreo.
Algunos programas de grabación de audio multipista, permiten usar a la vez hasta 4 tarjetas de sonido en un mismo ordenador. Con ello, se obtienen hasta 8 canales de sonido simultáneos (4 estéreo), por lo que podíamos colocar altavoces en las 8 esquinas de un cubo tridimensional (4 arriba y 4 abajo). Todo ello, con 4 tarjetas de sonido normales, de 16 bits, cada una con su pareja de altavoces auto amplificados.
Gracias a la revolución de las tarjetas de sonido (y a la de los procesadores), ya están en el mercado los primeros reconocedores de voz fiables, ya sean procesadores de texto (VoiceType de IBM), como cursillos de idiomas, programas de intercambio de audio a través de la red, o sonidos de videojuegos con calidad de CD. En definitiva, a una mayor comodidad por parte del usuario.
Los Altavoces
La gran mayoría de las tarjetas de sonido incluyen un amplificador interno de 4W por canal, lo que nos permite conectar a la salida “speakers” de la tarjeta unos altavoces sencillos como los utilizados en los walkman. Pero si queremos obtener una calidad de sonido mayor, deberemos conectar unos altavoces auto-amplificados. Para hacer una buena elección de los altavoces hay que tener en cuenta:
-
El número de controles: para obtener una buena calidad, además del control de encendido/apagado y volumen, deben incluir controles independientes para graves y para agudos, e incluso una tecla para acentuar el “efecto surround”.
-
Para una óptima calidad, la mejor solución es un Subwoofer, que se coloca en el suelo, y dos, o mejor cuatro, altavoces que se colocan a la altura de la cabeza.
La solución más económica y la que proporciona mayor calidad de sonido es conectar la salida LINE OUT de la tarjeta de sonido a la entrada LINE IN de una cadena de sonido. Esto proporcionará una amplificación potente y un sonido tan bueno como en la propia cadena ya que la salida LINE OUT de la tarjeta de sonido proporciona 44,1KHz, es decir, calidad de sonido digital, como el de un reproductor de CD.
2.3.2. RECONOCEDORES DE VOZ
Uno de los campos de investigación actual más relevantes relacionados con la Informática es el reconocimiento de la voz. Se pretende una comunicación directa del hombre con el ordenador, sin necesidad de transcribir la información a través de un teclado u otros soportes intermedios de información.
Normalmente los dispositivos de reconocimiento de la voz o de la palabra tratan de identificar fonemas o palabras dentro de un repertorio o vocabulario muy limitado. Un fonema es un sonido simple o unidad del lenguaje hablado. Un sistema capaz de reconocer 7 palabras, lo que hace al detectar un sonido es extraer características o parámetros físicos inherentes a dicho sonido, y compararlos con los parámetros (previamente memorizados) de las 7 palabras que es capaz de reconocer. Si, como resultado de la comparación, se identifica como correspondiente a una de las 7 palabras, se transmite a la memoria intermedia del dispositivo el código binario identificador de la palabra. Si el sonido no se identifica, se indica esta circunstancia al usuario (iluminándose una luz, por ejemplo) para que el usuario vuelva a emitir el sonido. Existen dos tipos de unidades de reconocimiento de la voz:
Dependientes del usuario: En estos sistemas es necesario someter al dispositivo a un período de aprendizaje o programación, al cabo del cual puede reconocer ciertas palabras del usuario. En el período de aprendizaje el sistema retiene o memoriza las características o peculiaridades de los sonidos emitidos por el locutor, y que luego tendrá que identificar.
Independientes del usuario: Estos sistemas están más difundidos, pero el vocabulario que reconocen suele ser muy limitado. Los parámetros de las palabras que identifican vienen ya memorizados. Son utilizados, por ejemplo, para definir el movimiento de cierto tipo de robots. En este caso el operador da verbalmente órdenes elegidas de un repertorio muy limitado, como para, anda, arriba, abajo,... La unidad cuando capta un sonido comprueba si corresponde a uno de los del repertorio. En caso de identificación se transmite al ordenador central la información necesaria para la ejecución del programa que pone en marcha y controla la acción requerida.
2.4. RATONES Y TRACKBALLS
2.4.1. RATÓN
La función principal del ratón es transmitir los movimientos de nuestra mano sobre una superficie plana hacia el ordenador. Allí, el software denominado driver (Fig.2.10) se encarga realmente de transformarlo a un movimiento del puntero por la pantalla dependiendo de varios parámetros.
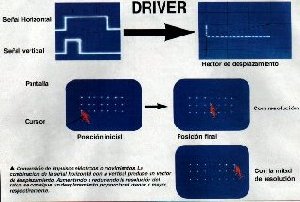
Figura 2.11. Driver del Ratón
En el momento de activar el ratón, se asocia su posición con la del cursor en la pantalla. Si desplazamos sobre una superficie el ratón, el cursor seguirá dichos movimientos. Es casi imprescindible en aplicaciones dirigidas por menús o entornos gráficos, como por ejemplo Windows, ya que con un pulsador adicional en cualquier instante se pueden obtener en programa las coordenadas (x,y) donde se encuentra el cursor en la pantalla, seleccionando de esta forma una de las opciones de un menú.
Hay cuatro formas de realizar la transformación y por tanto cuatro tipos de ratones:
1.- Mecánicos: Son los más utilizados por su sencillez y bajo coste. Se basan en una bola de silicona que gira en la parte inferior del ratón a medida que desplazábamos éste. Dicha bola hace contacto con dos rodillos, uno perpendicular al ratón y otro transversal, de forma que uno recoge los movimientos de la bola en sentido horizontal y el otro en sentido vertical (Figura 2.12).
En cada extremo de los ejes donde están situados los rodillos, existe una pequeña rueda conocida como “codificador”, que gira en torno a cada rodillo. Estas ruedas poseen en su superficie, y a modo de radios, una serie de contactos de metal, que a medida que gira la rueda toca con dos pequeñas barras fijas conectadas al circuito integrado en el ratón.
Cada vez que se produce contacto entre el material conductor de la rueda y las barras, se origina una señal eléctrica. Así, el número de se señales indicará la cantidad de puntos que han pasado éstas, lo que implica que, a mayor número de señales, mayor distancia habrá recorrido el ratón. Tras convertir el movimiento en señales eléctricas, se enviaban al software del ordenador por medio del cable. (Fig. 2.13.)
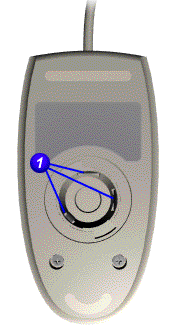
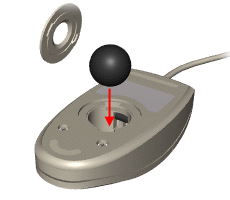
Figura 2.12. Bola y zonas de contacto con los rodillos
Los botones son simples interruptores. Debajo de cada uno de ellos se encuentra un microinterruptor que en estado de “reposo” interrumpe un pequeño circuito. En cuanto se ejerce una ligera presión sobre estos, se activa el circuito, dejando pasar una señal eléctrica que será única en caso de que sólo se haga “clic” con el botón, o continua en caso de dejarlo pulsado.
Por último las señales se dan cita en el pequeño chip que gobierna el ratón, y son enviadas al ordenador a través del cable con los une. Allí el controlador del ratón decidirá, en función del desplazamiento vertical y horizontal detectado, el movimiento final que llevará el cursor. También será capaz de aumentar o disminuir ese movimiento, dependiendo de factores como la resolución que se le haya especificado al ratón.

Figura 2.13. Esquema general de un ratón mecánico.
2.- Los ratones opto-mecánicos trabajan según el mismo principio que los mecánicos, pero aquí los cilindros están conectados a codificadores ópticos que emplean pulsos luminosos al ordenador, en lugar de señales eléctricas. El modo de capturar el movimiento es distinto. Los tradicionales rodillos que giran una rueda radiada ahora pueden girar una rueda ranurada, de forma que un haz de luz las atraviesa. De esta forma, el corte intermitente del haz de luz por la rueda es recogido en el otro lado por una célula fotoeléctrica que decide hacia donde gira el ratón y a que velocidad (figura 2.14).
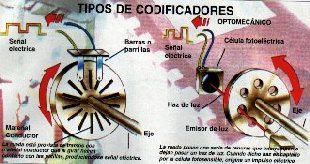
Figura 2.14. Codificadores del ratón.
3.- Los ratones de ruedas sustituyen la bola giratoria por unas ruedas de material plástico, perpendiculares entre sí, dirigiendo así a los codificadores directamente.
4.- Los ratones ópticos carecen de bola y rodillos, y poseen unos foto-sensores o sensores ópticos que detectan los cambios en los patrones de la superficie por la que se mueve el ratón. Antiguamente, estos ratones necesitaban una alfombrilla especial, pero actualmente no. Microsoft ha denominado a este sistema IntelliEye en su ratón IntelliMouse y es capaz de explorar el escritorio 1500 veces por segundo, sobre multitud de superficies distintas como madera plástico o tela. La ventaja de estos ratones estriba en su precisión y en la carencia de partes móviles, aunque son lógicamente algo más caros que el resto.
Una característica a tener en cuenta será la resolución, o sensibilidad mínima del sistema de seguimiento: en el momento en que el ratón detecte una variación en su posición, enviará las señales correspondientes al ordenador. La resolución se expresa en puntos por pulgada (ppp). Un ratón de 200 ppp podrá detectar cambios en la posición tan pequeños como 1/200 de pulgada, y así, por cada pulgada que se mueva el ratón, el cursor se desplazará 200 píxeles en la pantalla. El problema es que la relación entre la sensibilidad del movimiento y el movimiento en pantalla es de 1:1 (un desplazamiento equivalente a la sensibilidad mínima provoca un desplazamiento de un píxel en la pantalla); como consecuencia, cuanto mayor sea la resolución del monitor, mayor será el desplazamiento que habrá que imprimir al ratón para conseguir un desplazamiento equivalente en pantalla. Para solucionar este problema los fabricantes desarrollaron el seguimiento dinámico, que permite variar la relación anterior a 1:N, donde N > 1.
Una de las cosas que está cambiando es el medio de transmisión de los datos desde el ratón al ordenador. Se intenta acabar el cable que siempre conduce la información debido a las dificultades que añadía al movimiento. En la actualidad estos están siendo sustituidos por sistemas de infrarrojos o por ondas de radio (como incorpora el Cordless MouseMan Wheel de Logitech). Esta última técnica es mejor, pues los objetos de la mesa no interfieren la comunicación. Los dos botones o interruptores tradicionales han dejado evolucionado a multitud de botones, ruedas, y palancas que están dedicados a facilitar las tareas de trabajo con el ordenador, sobre todo cuando se trabaja con Internet. Hay modelos que no sólo tienen mandos que incorporan las funciones más comunes de los buscadores o navegadores, sino que tienen botones para memorizar las direcciones más visitadas por el usuario. Naturalmente, los fabricantes han aprovechado para poner botones fijos no configurables con direcciones a sus páginas.
La tecnología force-feedback consiste en la transmisión por parte del ordenador de sensaciones a través del periférico. Podremos sentir diferentes sensaciones dependiendo de nuestras acciones. Por ejemplo, si nos salimos de la ventana activa, podremos notar que el ratón se opone a nuestros movimientos. Por supuesto, un campo también interesante para esto son los juegos. En los juegos de golf, se podría llegar a tener sensaciones distintas al golpear la bola dependiendo de si esta se encuentra en arena, hierba, etc.. Lamentablemente, este tipo de ratones si se encuentra estrechamente unido a alfombrillas especiales.
Existen dos tipos de conexiones para el ratón: Serie y PS/2. En la práctica no hay ventaja de un tipo de puerto sobre otro.
Criterios para seleccionar un ratón
El primer criterio será la sencillez a menor número de botones y de mecanismos mayor será la sencillez de su uso. Aunque también para determinados trabajos en los que se precise utilizar de forma continuada el ratón será mejor elegir uno que facilite el trabajo a realizar y que además nos optimice el tiempo. Para ello son muy indicados sobre todos los ratones que poseen la ruedecilla central para que actúe de como scroll.
Otro criterio será el de ergonomía. El ratón deberá estar construido de modo que la mano pueda descansar naturalmente sobre él, alcanzando los dedos los pulsadores de forma cómoda.
Para elegir un ratón USB, al igual que con el teclado, hay que tener instalado el sistema operativo con el suplemento USB o no funcionará. Un ratón USB tiene una ventaja. El ratón PS/2 consume una IRQ (normalmente la IRQ12) y si lo conectas al COM1/2, pierdes un puerto serie (que si no utilizas puedes anular en la BIOS de la placa base y recuperar una IRQ para otros dispositivos). Cierto que el puerto USB también consume una IRQ, pero si te posees HUB USB o tienes otro dispositivo USB (dos dispositivos en 2 puertos USB sin un HUB), con dos (o hasta 128 usando HUBs) dispositivos USB sólo consumes una IRQ, y si lo puedes conectar al puerto USB del teclado, no gastas una IRQ adicional ni el otro puerto USB.
2.4.2. TRACKBALL
Es conocido como primo hermano del ratón dada su gran similitud con éste. La diferencia primordial estriba en que no es necesario desplazar todo el dispositivo, sino tan sólo la bola, que la tiene situada en su parte superior. Esta característica lo convierte en el sustitutivo idóneo del ratón en los ordenadores portátiles.
El funcionamiento del trackball es idéntico al descrito para el ratón. Para los trackballs no existe la versión óptica. (Figura 2.15.)
![]()
Figura 2.15. Trackball
2.5. OTROS DISPOSITIVOS AUXILIARES
2.5.1. LÁPIZ ÓPTICO
El lápiz óptico permite marcar un punto en la pantalla de un monitor CRT. Este dispositivo consta, en esencia, de una fotocélula y de un pulsador. Físicamente tiene la forma de una pluma o lápiz grueso, de uno de cuyos extremos sale un cable para unirlo a un monitor. El lápiz contiene un pulsador, transmitiéndose información hacia el monitor sólo en el caso de estar presionado. El usuario posesiona el lápiz sobre el punto deseado de la pantalla y acciona el pulsador. La célula fotoeléctrica detecta el paso del haz de electrones al efectuar el barrido sobre la pantalla, generando una señal eléctrica. Esta señal permite detectar la posición de la pantalla sobre la que se encuentra el lápiz. Así, mediante software adecuado, el lápiz óptico sirve para dibujar sobre la pantalla, o para seleccionar las funciones de un menú presentado en ella. Es incómodo mantener el lápiz sobre la pantalla largos períodos de tiempo. Este tipo de dispositivo es más adecuado para aplicaciones con representación visual vectorial que para aquellas que tienen una representación visual que es generada por barrido.
2.5.2. JOYSTICK
Se trata, como el ratón, de un manejador de cursor. Consta de una palanca con una rótula en un extremo, que permite efectuar rotaciones según dos ejes perpendiculares. La orientación de la palanca es detectada por dos medidores angulares perpendiculares, siendo enviada esta información al ordenador. Un programa adecuado convertirá los ángulos de orientación de la palanca en desplazamiento del cursor sobre la misma.
Principalmente existen dos diferentes tipos de joystick: los analógicos y los digitales. Para la construcción de uno analógico se necesitan dos potenciómetros, uno para la dirección X y otro para la dirección Y, que dependiendo de la posición de la palanca de control producen un cambio en la tensión a controlar. Contienen además un convertidor tensión / frecuencia que proporciona los pulsos que se mandan por el puerto según la señal analógica de los potenciómetros. Los digitales no contienen elementos analógicos para obtener las señales de control, sino que los movimientos son definidos por el software de control que incluirá el dispositivo en cuestión.
Sistema de conexión: Van conectados al puerto juegos de la placa, al de la tarjeta de sonido, al puerto o puertos de una tarjeta de juegos, o eventualmente, al puerto serie o paralelo. Aunque la opción del puerto de la tarjeta de sonido es con mucho la más utilizada por ahorro de recursos.
Tecnología: Aquí dependiendo del tipo de joystick que estemos hablando (palanca, joypad, volante, etc) la tecnología utilizada es variopinta. A pesar de ello es útil optar por mandos robustos y que ofrezcan buen soporte de software. Los basados en tecnología digital son ideales para los que requieran precisión.
Muchos joystick permiten de forma sencilla y simplemente mediante el uso de un cable especial (en forma de Y), la utilización de dos dispositivos simultáneos.
Posibles problemas: Lo más frecuente son los provenientes de la mala configuración del software. Estos dispositivos necesitan ser instalados y calibrados mediante los programas incluidos antes de poder ser utilizados.

Figura 2.16. Diagrama de un joystick analógico
Tipos de Joysticks:
-
Pads. Se componen de una carcasa de plástico con un mando en forma de cruz para las direcciones y unos botones para las acciones. El control se hace de forma digital: es decir, o pulsas o no pulsas.
-
Joystick clásico. Una carcasa de plástico con una palanca con botones de disparo, imitando a las de los aviones. El control en estos joysticks suele ser analógico: cuánto más inclinas la palanca, más rápido responde el juego. Especialmente recomendados para simuladores de vuelo.
-
Volantes y pedales. Para juegos de coches. Son caros.
También hay joysticks 3D, con procesador incorporado (para responder a tus movimientos) e incluso los hay que dan sacudidas y tal cuando te pegan un tiro.
3. PERIFÉRICOS DE ALMACENAMIENTO
La Memoria Principal de un ordenador presenta dos importantes inconvenientes: la limitación en cuanto al espacio de almacenamiento de información que proporciona, además de sus características de volatilidad. Aunque el primer problema queda resuelto en parte gracias al desarrollo y abaratamiento de costes que han tenido las memorias de semiconductores en los últimos tiempos, que permiten integrar en un simple PC memorias RAM de varios Megabytes, está claro que necesitaremos dispositivos auxiliares no volátiles de almacenamiento de información. Vamos a centrarnos fundamentalmente en los siguientes dispositivos: las unidades de cinta magnética y los discos magnéticos y ópticos. Estos dispositivos suelen denominarse unidades de almacenamiento secundarias o externas, mientras que la Memoria Principal del ordenador será la unidad de almacenamiento principal o interna.
Figura 3.1. Controles sobre las unidades de almacenamiento
3.1. UNIDADES DE CINTA MAGNÉCA
Las unidades de cinta magnética son dispositivos de entrada / salida de datos de acceso secuencial, que permiten la grabación y lectura (no destructiva) de la información sobre un soporte magnético. Una unidad de cinta constará, aparte del soporte de almacenamiento (cinta magnética), de un controlador de cinta, que reúne los elementos electrónicos y electromecánicos que permiten realizar las acciones de lectura y escritura de información, posicionado de la cinta y sincronismo, envío y recepción de los datos (es la interfaz con el ordenador).
El soporte de almacenamiento magnético consta de una cinta de material sintético de 1/2 de pulgada de anchura y del orden de 3 centésimas de milímetro de espesor, recubierta de una capa de óxido de hierro, óxido de cromo o partículas de metal, de 1.5 centésimas de milímetro de espesor. Estas cintas se suministran en carretes de unos 800 m. de longitud.
El ancho de la cinta está dividido en 9 pistas a lo largo de toda la longitud de la misma, cada una de ellas asociada con una cabeza de grabación y lectura, que permiten la escritura o lectura de un carácter, compuesto de 8 bits más un bit auxiliar de paridad vertical. Cada cierto número de caracteres se intercala también un carácter especial de paridad horizontal; cada bit del mismo nos informa sobre la paridad del conjunto de bits de su pista hasta el último carácter de paridad.
No toda la longitud de la cinta puede emplearse para almacenar datos, ya que además necesitaremos disponer de información de dirección para poder acceder a la zona de datos deseada. Además, el mecanismo de posicionado de la cinta necesita pasar una cierta longitud de cinta mientras se produce una parada o se alcanza la velocidad de régimen de la cinta, por lo que se necesita dejar unos claros sin información entre los registros que se quieren leer de forma independiente, esto es, parando la cinta entre ellos. Estos claros se denominan Inter Record Gaps (IRG), y tienen una longitud de 1.5 cm. Para optimizar la ocupación de la cinta, los registros pueden agruparse formando bloques. Un grupo de bloques forma, a su vez, un fichero. Cada fichero tiene un registro cabecera con su nombre y características, que permite su identificación. Por su lado, cada registro tiene una cabecera, que consta de un identificador y una zona de sincronismo, y una cola, con un código de detección de error y una zona de fin de registro (ver fig. 3.2.). La cinta sólo se puede leer y grabar en un sentido, mientras que sí se puede retroceder o avanzar un número determinado de registros, mediante la detección de las marcas de fin de registro.
Figura 3.2. Formato de una cinta magnética
El principal problema que presentan las cintas magnéticas, aparte de la lentitud de acceso secuencial, consiste en la imposibilidad de intercalar información adicional. Para ello hay que volver a grabar todo el resto de la cinta hasta el final. Las unidades de cinta magnética pierden terreno frente a los discos magnéticos. Prácticamente sólo se emplean para efectuar copias de seguridad (back-up). Además de las unidades de cinta de 1/2 de pulgada, existen diversos tipos de unidades compactas tipo cassette. Se basan en los mismos principios descritos, pero las prestaciones son menores y su mecanismo de arrastre suele ser más sencillo. En la actualidad están tomando cierto auge, utilizándose para realizar copias de seguridad en work-stations.
3.2. DISCOS MAGNÉTICOS
El disco magnético constituye un periférico clave en todo ordenador, gracias a permitir almacenar información de forma no volátil, a su alta capacidad de almacenamiento y a tratarse de un dispositivo de acceso directo, en contraposición a la cinta magnética. Una unidad de disco magnético se comportará funcionalmente como una unidad de cinta, siendo, como aquella, un periférico de entrada / salida. En una unidad de disco magnético, deberemos distinguir de nuevo entre el soporte de almacenamiento y el controlador de disco. Las tareas que realizan ambos elementos serán análogas a las realizadas por sus homólogos, en el caso de la cinta magnética.
Nuevamente nos encontramos ante un soporte magnético, de lectura no destructiva, consistente en uno o varios discos (recubiertos de una fina película magnética), que giran solidariamente a alta velocidad (unas 3.000 r.p.m). El sistema puede tener una o varias cabezas de lectura-escritura por superficie. En el primer caso estaremos ante un sistema de brazo o cabeza móvil, y en el segundo, ante un sistema de cabeza fija o cabeza por pista (ver fig. 3.3.). Para entender el funcionamiento de estos sistemas tendremos que referirnos a la organización del disco, que se divide en pistas, sectores y cilindros.
Una pista es la porción del soporte de almacenamiento que gira delante de una cabeza. En los sistemas de cabeza fija, cada una de éstas define una pista. En los de cabeza móvil, puesto que el brazo puede desplazar la cabeza radialmente mediante mecanismos hardware, cada posición de la cabeza definirá una pista distinta. En un sistema de cabezas fijas el cambio de una pista a otra se efectúa rápidamente, pero el gran número de cabezas que se precisan hacen caro el dispositivo, mientras que en un sistema de cabeza móvil precisa sólo de una cabeza, lo que reduce el precio. Los caracteres dentro de una pista se almacenan en serie, de forma opuesta al método utilizado en las cintas magnéticas (ver fig.3.4.)
Figura 3.3. Unidades de disco de cabeza móvil y fija
A su vez, las pistas se dividen en sectores. Cada sector constituye la unidad de información que se transfiere en un acceso (de escritura o de lectura). La forma de acceso a un determinado sector se realiza gracias a información de direccionamiento contenida en la propia pista.
Finalmente, en los sistemas de varias superficies y de brazo móvil, aquellas pistas a las que se accede en cada posición del brazo, constituyen un cilindro. La selección de una pista, dentro de un cilindro, se efectúa por medios electrónicos (lo único que hay que hacer es seleccionar la cabeza deseada).
Figura 3.4. Pistas y sectores
En general las cabezas de lectura-escritura no están en contacto sobre el soporte, sino que planean sobre él a una distancia de una diezmilésima de mm, gracias al aire que desplaza el disco en su giro. Esto permite que las cabezas se adapten a las irregularidades de la superficie. Existen mecanismos que impiden que las cabezas puedan golpear a ésta, por ejemplo, al disminuir la velocidad de giro por un fallo en la alimentación eléctrica.
La densidad de grabación dependerá del tamaño de las cabezas, así como de la distancia que las separa de la superficie magnetizada. Para una unidad de disco determinada, la densidad de grabación angular o número de bits grabados por pista es fija, por lo que la densidad de grabación lineal o número de bits grabados por unidad de longitud es mayor en las pistas interiores. Otra magnitud que nos informa sobre la cantidad de información almacenada es la densidad de grabación superficial o número de bits grabados por unidad de superficie. Se espera conseguir próximamente densidades de grabación superficial de 100Mbits por pulgada cuadrada. Lógicamente cuanto menor sea la separación entre pistas mayor será esta magnitud. Es normal disponer de más de 1.000 pistas por pulgada. No obstante, lo más usual será especificar la capacidad total de almacenamiento de la que dispone la unidad de disco, que viene expresada en Megabytes (encontraremos capacidades por unidad desde 5M hasta 300M).
Para poder reconocer la información del disco hay que añadir una información de direccionamiento y, a veces, de sincronismo. El formato de grabación especificará esta información. También se han de incluir, al igual que en las cintas magnéticas, unos claros o gaps entre sectores. Este formato puede ser de tipo hardware o software. En el primer caso, existen unas marcas fijas, físicamente situadas sobre el soporte, que indican el comienzo de cada sector. Esto hace que los sectores sean de tamaño fijo. En el segundo caso, sólo existe una marca o índice que indica el principio de las pistas. Los distintos sectores se identificarán por su cabecera.
Ya hemos dicho que el acceso en las unidades de disco es directo. El tiempo de acceso viene dado por el tiempo de posicionado del brazo en la pista deseada (tiempo de búsqueda), más el tiempo que tarda la información de la pista en pasar delante de la cabeza por efecto de la rotación del disco (latencia). Estos tiempos dependen de la posición de partida y del lugar donde se aloje la información buscada. Suelen especificarse los valores peores y medios de acceso.
3.2.1. DISCO DURO
El disco duro es el dispositivo donde se almacenan todos los datos de manera permanente, además de tener instalados el sistema operativo (DOS, WINDOWS, etc. ) y los programas que se utilizan habitualmente en el ordenador (procesador de textos, hoja de cálculo, base de datos, etc.)
La velocidad de transferencia de datos entre el disco duro y el ordenador depende básicamente de la controladora, que normalmente está integrada en la placa madre y se comunica con el disco duro mediante un bus. También existen controladoras que van en una tarjeta que se une a la placa a través de una ranura de expansión. Si el ordenador es lento, es inútil disponer de velocidades de transferencia rápidas, ya que el microprocesador no es capaz de admitir datos a tanta velocidad.
Las dos tecnologías de interfaces que coexisten actualmente en la fabricación de discos duros son SCSI y EIDE. Los primeros se emplean fundamentalmente en equipos de gama alta, mientras que los EIDE son los mas extendidos.
EIDE (Extended Integrated Device Electronics): Estos discos duros, poseen la circuiteria de control en el propio disco duro, lo que los hace económicos y fáciles de producir. Actualmente su capacidad se halla en el rango de 250 MB a 9 GB. La diferencia entre los antiguos IDE y los actuales EIDE radica en los modos de transferencia de datos: los EIDE soportan además del modo PIO 1 propio de IDE, los modos PIO 2 a PIO 5; además soportan los modos DMA 0 y 1. Una controladora IDE solo soporta 2 discos duros, mientras que EIDE soporta hasta 4 dispositivos.
Figura 3.5. Enhanced Integrated Disk Electronic (EIDE)
SCSI (Small Computers System Interface): Normalmente de mayor capacidad que los IDE y mejores prestaciones, esta interfaz permite conectar en cadena hasta 7 discos a una sola controladora. La principal desventaja de los SCSI radica en su precio y en su mayor dificultad de instalación. Dentro de esta interfaz podemos distinguir entre el SCSI (ancho de banda de 8 bits), SCSI-2 (ancho de banda de 16 bits), Fast Wide SCSI-2 (ancho de banda de 16 bits y transferencia máxima en modo síncrono de 20 Mbytes por segundo), Ultra SCSI (ancho de banda de 8 bits y velocidad de transferencia máxima de 20 Mbytes/segundo) y Ultra Wide SCSI (ancho de banda de 16 bits y velocidad máxima de transferencia de 40 Mbytes/segundo).
Dentro de los parámetros a fijarnos para determinar las prestaciones de un disco duro, tenemos:
-
TMA: Tiempo medio de acceso (Average Seek Time) o tiempo medio de búsqueda y posicionamiento de las cabezas del disco duro en un cilindro determinado. Se mide en milisegundos (ms). Es el valor que suele aparecer en todas las tablas de características de discos duros.
-
TMB: Posicionamiento pista a pista ( Track-Track Seek). Tiempo medio de posicionamiento de las cabezas del disco duro entre dos cilindros consecutivos. Se mide también en milisegundos (ms) y no suele especificarse en las tablas.
-
VELOCIDAD DE TRANSFERENCIA DE DATOS: ( Data Transfer Rate). Especifica la cantidad máxima de información que se transfiere por unidad de tiempo. Se mide en Mbytes/segundo.
-
MTBF: Tiempo medio de vida entre fallos. Se especifica en horas.
-
CAPACIDAD: Hoy en día se mide en MB o GB.
Una vez determinado el modelo de disco duro, otro factor a tener en cuenta es la optimización de su funcionamiento. Es aquí donde incluimos:
-
Fragmentación: cuando un fichero se encuentra almacenado en partes dispersas del disco duro, las cabezas deben desplazarse de una parte a otra para leer la información, con las consiguientes perdidas de prestaciones. Mediante utilidades software, como las Utilidades Norton, podemos conseguir desfragmentar el disco. Este proceso deberá efectuarse periódicamente.
-
Caché software de disco: mediante una utilidad software ( Smartdrv.exe en el MS DOS) se reserva una cierta cantidad de espacio en la memoria RAM que permite almacenar en ella los datos sensibles del disco duro FAT, Tabla de directorios ... así como la información mas recientemente utilizada. Ello hace aumentar significativamente las prestaciones. Por ultimo indicar que el tamaño de dicho caché debe ir en función de la cantidad de memoria RAM del sistema.
Por ejemplo un esquema sencillo de un disco duro seria el mostrado enla figura 3.6. Se trata de un conjunto de discos o platos rígidos montados verticalmente uno encima de otro, herméticamente cerrados en una carcasa metálica que evita que se pueda deteriorar la superficie de los discos o las cabezas lectoras.
Figura 3.6. Esquema de un Disco Duro
Para la lectura del disco duro se realiza el acceso por cilindros.Cuando se lee o escribe, las cabezas de lectura no están en contacto con el disco. (Fig. 3.7.)
Figura 3.7. Lectura en un Disco Duro
En el dibujo de arriba se destacan las “cabezas lectoras”. La distancia entre las cabezas y los discos es de 0,3 micras. La cabeza lectora nunca toca los discos, los dañaría (esto era uno de los grandes problemas de los ordenadores antiguos).
Otro concepto a la hora de funcionar con disco duro (H.D.), es la controladora que es un dispositivo necesario que hace de intermediario entre el ordenador y el disco duro. Transforma las peticiones de lectura y escritura en las señales eléctricas adecuadas para el funcionamiento del disco duro. Para pasar información del disco duro a la memoria necesitamos la controladora de disco que hará de intermediario entre el ordenador y esos dispositivos de almacenamiento. La controladora de disco debe ser compatible con ambos dispositivos.
3.2.2. DISKETES
Existen otros dispositivos auxiliares de almacenamiento externo de soporte magnético extraíbles, los disketes o floppy disks. Su funcionamiento no es totalmente similar a los discos magnéticos comentados anteriormente, ya que aquí se los recubre de una superficie resistente que permite el contacto de la cabeza de lectura-escritura sobre la superficie magnetizada, lo que permite más sencillez de uso y menos coste, si bien su capacidad de almacenamiento es mucho más reducida (100K a 1.44 M).
Los disquetes son pequeños discos cuyos platos son flexibles, ya que están constituidos por un material de plástico y son intercambiables. La superficie se encuentra protegida por una funda recubierta internamente de un material que facilita el deslizamiento rotacional del plato. En la funda hay una abertura radial que abarca a todas las pistas; a través de esta ventana las cabezas de la unidad de disquetes acceden a la información. También en el sobre y en el plato hay otro orificio que sirve para que la unidad por medios ópticos tenga una referencia de alineación para localizar pistas y sectores. El centro está abierto con objeto de que el disquete ajuste en el eje de rotación de la unidad de lectura / grabación.
Los disquetes siguen siendo un medio muy importante para introducir y extraer datos del ordenador. Por eso se comentan brevemente los aspectos relativos a la unidad en la que se insertan: las denominadas disqueteras.
Hoy en día la práctica totalidad de los discos que se venden son de 1.44 Mb, y las disqueteras actuales son para discos de alta densidad pero, aunque los discos sean de menor capacidad, pueden ser leídos en la misma unidad de disco
Funcionamiento de una disquetera conlleva los siguientes pasos:
El rotor hace girar el disco situado en el interior del disquete una vez insertado en la disquetera. Una cabeza de lectura/escritura se mueve sobre la superficie del disco escribiendo o leyendo los datos. Dado que el disco gira a una velocidad constante, los datos son escritos en él también a velocidad constante, con lo cual, las pistas más céntricas contendrán más datos por pulgada que las más externas.
Un haz de luz atraviesa la muesca de protección del disquete y comprueba si está protegido antes de escribir o borrar datos.
Un diodo LED externo indica si la unidad está leyendo o escribiendo.
3.3. DISCOS ÓPTICOS
Las memorias ópticas presentan un gran potencial de almacenamiento, lo que está produciendo su expansión con la aparición de sistemas de lectura-escritura más económicos. Estos sistemas poseen densidades de almacenamiento extremadamente altas, del orden de 10 veces mayor que las existentes en las mejores unidades de disco magnético actuales. El almacenamiento óptico también es adecuado para la utilización de sistemas extraíbles, y los sistemas ópticos son más resistentes y fiables que los magnéticos, al no existir la posibilidad de colisión de las cabezas que había en éstos, además de ser mucho más duraderos. Un sistema de almacenamiento óptico utiliza métodos ópticos para leer y/o escribir datos sobre un soporte de disco, en esencia un haz láser que explora las variaciones de dos estados de reflexión sobre una superficie especial. Existen distintas tecnologías que llevan a cabo estas operaciones: hay que distinguir entre unidades de disco de sólo lectura y de lectura-escritura
Estos sistemas se basan en las marcas físicas permanentes hechas sobre una superficie con un láser de baja potencia, de modo que una vez escrito no se puede borrar (WORM- Write Once Read Many - una escritura múltiples lecturas). Estos dispositivos ofrecen un medio de almacenamiento de alta capacidad, fácil transportabilidad y alta resistencia a la influencia de factores del medio. Sin embargo, sus prestaciones son muy inferiores a las de los discos duros, por lo que se han convertido en medios complementarios a éste, pero no excluyentes.
El primer intento lo realizaron Iomega y 3M en 1993 con su disco FLOPTICAL, pero su relativamente baja capacidad de 21Mb y su precio lo hicieron desaparecer pronto. Sin embargo, los avances en el campo de los CD-ROM, posteriormente las unidades CD-RW, que permiten borrar los datos y grabar en su lugar otros, y la aparición del DVD con su alta capacidad de almacenamiento de hasta 17 GB, han hecho a esta tecnología una de las más extendidas actualmente.
Figura 3.7. Grabación y lectura láser
3.3.1. CD-ROM (Compact Disk Read Only Memory)
En primer lugar, un CD-ROM es básicamente una adaptación del sistema de grabación de audio digital (un CD de audio no es más que una ROM, de unos 500Mbytes de capacidad, leída por medios ópticos mediante un haz láser). Los datos, con formato digital, se escriben en discos maestros mediante un equipo especial de grabación que hace unos surcos microscópicos en la superficie del disco, obteniéndose a partir de este disco maestro las copias mediante un proceso mecánico de presión, con lo que las copias así realizadas poseen contenidos de información fijos. La información codificada en los surcos se puede leer detectando, mediante un fotodetector incorporado al haz láser, los cambios en la reflexión del elemento de superficie iluminado por el láser. Gracias al desenfoque del haz en la capa más externa de la superficie, se puede conseguir gran insensibilidad frente al polvo e imperfecciones de la misma.
Las características de estos discos ya todos las conocemos, están formados por un disco de policarbonato de 120 mm de diámetro y 1.2 mm de espesor. Grabamos la superficie plástica, damos un baño de aluminio y nuevamente otra superficie plástica, finalmente imprimimos una de las caras, contra lo que muchos podrían pensar, la capa de datos es la capa superior, es decir, aquella que está impresa y por lo tanto el haz de luz debe atravesar los 1.2 mm de espesor del CD para llegar hasta los datos. Prueba de esto es el que a menudo nuestros CDs presentan pequeñas muescas o rayazos y aun así los datos siguen siendo accesibles, esto es debido a varias razones, en primer lugar los métodos de redundancia y recuperación de errores implementados, pero además es que muchos de estos arañazos no afectan a la capa de datos que está en la cara opuesta del CD. Pequeñas ralladuras en la capa impresa pueden afectar a los datos y contra lo que cabría esperar serían más perjudiciales de cara a la recuperación de estos. No obstante la propia capa impresa es a menudo protección suficiente para nuestros CDs.
El mecanismo de lectura de un CD es el siguiente (Fig. 3.8):
-
Un haz de luz coherente (láser) es emitido por un diodo de infrarrojos hacia un espejo que forma parte del cabezal de lectura que se mueve linealmente a lo largo de la superficie del disco.
-
La luz reflejada en el espejo atraviesa una lente y es enfocada sobre un punto de la superficie del CD
-
Esta luz incidente se refleja en la capa de aluminio. La cantidad de luz reflejada depende de la superficie sobre la que incide el haz. Así, decíamos que sobre la superficie de datos del disco se imprimen una serie de hoyos, si el haz de luz incide en un hoyo esta se difunde y la intensidad reflejada es mucho menor con lo que solo debemos hacer coincidir los hoyos con los ceros y los unos con la ausencia de hoyos y tendremos una representación binaria.
-
La luz reflejada se encamina mediante una serie de lentes y espejos a un fotodetector que recoge la cantidad de luz reflejada
-
La energía luminosa del fotodetector se convierte en energía eléctrica y mediante un simple umbral nuestro detector decidirá si el punto señalado por el puntero se corresponde con un cero o un uno.
Señal binaria
Sensor
Diodo Láser Rayo reflectado Espejo Móvil
Divisor de Rayos
Disco óptico
Figura 3.8. Lectura de un CD-ROM
La presencia de un cabezal de lectura óptico y no magnético evita muchos problemas al no existir un contacto directo entre este y la superficie del disco pero aun así hay ciertos cuidados que se deben tener en cuenta como la limpieza de la superficie o el polvo acumulado en la superficie de las lentes que pueden acabar afectando a una lectura errónea por parte del lector.
Tenemos ya una idea aproximada de como se realiza la lectura de un dato almacenado en una posición concreta de la superficie del CD-ROM, pero ahora nos queda saber como son estos datos almacenados y como se realiza la lectura de una secuencia de estos. En primer lugar, debemos explicar como es el movimiento del cabezal a través de la superficie del disco y en que forma se distribuyen los datos.
El CD-ROM va provisto de un motor que hace girar el disco, así tenemos dos opciones que son mantener la velocidad lineal constante o que la que permanezca constante sea la velocidad de giro:
-
CAV (constant angular velocity): El disco rota a una velocidad constante independientemente del área del disco a la que accede. El disco tarda siempre el mismo tiempo en dar una rotación de 360 grados independientemente de lo cerca o lejos que la cabecera esté del centro del CD-ROM.
-
CLV (constant linear velocity): Heredado de los CD de audio estándar, el CD-ROM ajusta la velocidad del motor de manera que su velocidad lineal sea siempre constante. Así, cuando el cabezal de lectura está cerca del borde el motor gira más despacio que cuando está cerca del centro. Este hecho dificulta mucho la construcción del lector pero asegura que la tasa de entrada de datos al PC sea constante. La velocidad de rotación en este caso es controlada por un microcontrolador que actúa según la posición del cabezal de lectura para permitir un acceso aleatorio a los datos.
Los primeros CD-ROM operaban a la misma velocidad que los CD de audio estándar: de 210 a 539 RPM dependiendo de la posición del cabezal, con lo que se obtenía una razón de transferencia de 150 KB/s velocidad con la que se garantizaba lo que se conoce como calidad CD de audio. No obstante, en aplicaciones de almacenamiento de datos interesa la mayor velocidad posible de transferencia para lo que es suficiente aumentar la velocidad de rotación del disco. Así aparecen los CD-ROM 2X, 4X,.... 40X, ?X que simplemente duplican, cuadriplican, etc. la velocidad de transferencia.
La mayoría de los dispositivos de menor velocidad que 12X usan CLV, los más modernos y rápidos, no obstante, optan por la opción CAV. Al usar CAV, la velocidad de transferencia de datos varía según la posición que ocupen estos en el disco al permanecer la velocidad angular constante.
Un aspecto importante al hablar de los CD-ROM de velocidades 12X o mayores es, a que nos referimos realmente cuando hablamos de velocidad 12X, dado que en este caso no tenemos una velocidad de transferencia 12 veces mayor que la referencia y esta ni siquiera es una velocidad constante. Cuando decimos que un CD-ROM CAV es 12X queremos decir que la velocidad de giro es 12 veces mayor en el borde del CD. Así un CD-ROM 24X es 24 veces más rápido en el borde pero en el medio es un 60% más lento respecto a su velocidad máxima.
Existen distintos formatos:
-
CD-DA (Compact Disk Digital Audio) Este fue sin duda el primer formato utilizado en el mundo del CD y fue desarrollado por Philips y Sony a principios de los 80. Este estándar especifica no solo el formato de datos de audio sino también las características en cuanto a la disposición de estos en el dispositivo, distancia entre pistas, etc.
El sonido almacenado en el CD es previamente muestreado para convertirlo a formato digital a una frecuencia de 44.1 Khz en estéreo, lo que se conoce como calidad CD (el oído llega hasta unos 20 Khz). Las muestras de 16 bits son almacenadas en el CD. Tenemos entonces una tasa de 176.400 bytes/s. Los datos de audio son almacenados en sectores de 2.352 bytes de datos más una cantidad adicional de datos para corrección de errores de manera que cada segundo de sonido precisa de 75 sectores. De esta forma, 74 minutos de CD llevan 2.352x74x75x60 = 747 MB. De aquí que 1 minuto lleva 10 MB aproximadamente en un CD de audio.
-
High Sierra, ISO 9960 Este formato es el utilizado habitualmente para datos y está basado en el estándar anterior. Prácticamente todos los CD-ROM existentes implementan únicamente este formato de sector que constituye el auténtico estándar. Los datos aquí se presentan prácticamente del mismo modo que en los CD de audio pero se añade un código de protección de errores adicional. En este formato se ahorran las informaciones para la corrección de errores aumentando el tamaño del sector de datos y se mantienen el sistema de corrección de errores básico. La justificación de este formato está en que ciertos tipos de datos, como el vídeo o sonido no requieren tanta protección como otro tipo de información. De esta forma, cuando tenemos este tipo de información podemos utilizar este tipo de sectores con lo que obtendremos una tasa de datos mayor. No obstante pocos son los CD-ROM que permiten este sistema.
-
CD-ROM XA ( Extended Architecture ) Los discos que utilizan este formato se han convertido en un estándar dentro del multimedia. Fue creado por Sony y Philips con la colaboración de Microsoft en 1989 y perfeccionado en 1991. Una de sus características es que puede utilizar el mecanismo conocido como Interleave. Este mecanismo viene de las características del fenómeno multimedia y motivado por los altos tiempos de acceso de estas unidades. Cuando corremos una aplicación multimedia en nuestro PC tenemos que al mismo tiempo podemos necesitar reproducir sonido, imagen y posiblemente texto o datos de cualquier otro tipo. Si realizamos el acceso a estas distintas fuentes de información abriendo y cerrando cada fichero nos encontramos con la necesidad de ir desplazando la cabeza lectora para ir leyendo las distintas fuentes. Los altos tiempos de acceso limitarían de forma importante las tasas de información y las fuentes simultáneamente utilizadas.
-
CD-I ( Interactive ) Este formato hizo su aparición en 1986 y es un formato próximo al CD-ROM / XA anteriormente explicado. Fue creado con la ambiciosa idea de desarrollar un nuevo tipo de hardware. Este fue el primer intento importante de crear lo que conocemos como multimedia y que integra texto, gráficos, video, audio y datos binarios. El CD-I pretende facilitar la conexión de este dispositivo a una pantalla de televisión. Para estas funciones los dispositivos de CD-I van provistos de su propio microprocesador que sustituye al PC. Algunas unidades de CD-ROM modernas ofrecen compatibilidad con estos dispositivos.
-
Photo CD Este estándar fue desarrollado a principios de los 90 por Kodak y Philips y usa el modo 2 y forma 1 antes explicados en CD-ROM / XA. El procedimiento comienza desde la toma de las fotos, estas son convenientemente digitalizadas y grabadas en el CD por el procedimiento habitual. La ventaja es que pertenece al tipo de discos grabables y permite ser actualizado y regrabado en varias sesiones. Son fáciles de reconocer ya que en este caso su baño no es de aluminio y sustituye ese habitual brillo plateado por un brillo dorado. Los habituales hoyos son en este caso sustituidos por una sustancia de color cuyas propiedades de reflexión varían utilizando un láser de manera que después sean legibles para las unidades convencionales de CD-ROM.
-
DVD: Hablaremos de ellos mas detenidamente después.
Parámetros de interés:
- Latencia: Una vez que el cabezal de lectura está en el sitio correcto para realizar una lectura, al estar girando el disco, debe esperar a que pase por el punto adecuado para comenzar a leer. La cantidad de tiempo que lleva, en media, hasta que la información pasa por donde espera el cabezal de lectura desde que este está en el lugar adecuado es lo que se conoce como latencia. Obviamente la latencia depende directamente de la velocidad del dispositivo, es decir, cuanto mayor sea la latencia en un dispositivo 32X es mucho menor que un 4X. No es un parámetro sencillo de medir y no suele ser dado para un CD-ROM ya que forma parte del tiempo de acceso.
- Tiempo de acceso: El tiempo de acceso se toma como la cantidad de tiempo que le lleva al dispositivo desde que comienza el proceso de lectura hasta que los datos comienzan a ser leídos. Este parámetro viene dado por: la latencia, el tiempo de búsqueda y el tiempo de cambio de velocidad (en los dispositivos CLV). Téngase en cuenta que el movimiento de búsqueda del cabezal y la aceleración del disco se realizan al mismo tiempo, por lo tanto no estamos hablando de sumar estos componentes para obtener el tiempo de acceso sino de procesos que justifican esta medida.
Este parámetro, obviamente, depende directamente de la velocidad de la unidad de CD-ROM ya que los componentes de este también dependen de ella. La razón por la que el tiempo de acceso es tan superior en los CD-ROM respecto a los discos duros es la construcción de estos. La disposición de cilindros de los discos duros reduce considerablemente los tiempos de búsqueda. Por su parte los CD-ROM no fueron inicialmente ideados para el acceso aleatorio sino para acceso secuencial de los CD de audio. Los datos se disponen en espiral en la superficie del disco y el tiempo de búsqueda es por lo tanto mucho mayor.
- Tiempo de búsqueda: El tiempo de búsqueda se refiere al tiempo que lleva mover el cabezal de lectura hasta la posición del disco en la que están los datos. Solo tiene sentido hablar de esta magnitud en media ya que no es lo mismo alcanzar un dato que está cerca del borde que otro que está cerca del centro. Esta magnitud forma parte del tiempo de acceso que es un dato mucho más significativo.
- Tiempo de cambio de velocidad: En los CD-ROM de velocidad lineal constante, la velocidad de giro del motor dependerá de la posición que el cabezal de lectura ocupe en el disco, más rápido cuanto más cerca del centro. Esto implica un tiempo de adaptación para que este motor tome la velocidad adecuada una vez que conoce el punto en el que se encuentran los datos. Esto se suele conseguir mediante un microcontrolador que relaciona la posición de los datos con la velocidad de rotación.
- Caché: La mayoría de los CD-ROM suelen incluir una pequeña caché cuya misión es reducir el número de accesos físicos al disco. Cuando se accede a un dato en el disco éste se graba en la caché de manera que si volvemos a acceder a él, éste se tomará directamente de esta memoria evitando el lento acceso al disco. Por supuesto cuanto mayor sea la caché mayor será la velocidad de nuestro equipo pero tampoco hay demasiada diferencia de velocidad entre distintos equipos por este motivo ya que esta memoria sólo nos evita el acceso a los datos más recientes que son los que van sustituyendo dentro de la caché a los que llevan más tiempo.
3.3.2. WORM
Este sistema (Write Once, Read Mostly) es un sistema CD-ROM que incluye el sistema de escritura maestro dentro de la unidad de disco en sí. No obstante, la diferencia estriba en el proceso de grabación: las unidades WORM normalmente utilizan el calor que produce el láser para oscurecer la superficie del disco o evaporar parte de ella. Estos sistemas no permiten una producción masiva de copias a partir de una unidad maestra.
En contraste con estas dos tecnologías de grabación irreversible, existen los llamados sistemas regrabables, que permiten lectura y escritura a voluntad. Por lo menos tres tecnologías han sido desarrolladas para los sistemas ópticos regrabables de almacenamiento de datos: Dye Polimer, Phase Change y Magneto Optical.
Los sistemas Dye Polimer, desarrollados por Tandy, utilizan discos translúcidos que contienen una capa interior que al ser calentada por un láser se hincha convirtiéndose en una protuberancia, que cambia la reflexión del disco, detectándose así por el fotodetector. Un segundo tratamiento con el láser hace que la protuberancia se relaje, borrándose así el bit codificado. Estas unidades aún no están disponibles comercialmente.
Los sistemas Phase Change, de Pioneer y Panasonic, funcionan creando alteraciones entre estados cristalinos y amorfos en el soporte de grabación, con grados de reflexión diferentes.
Los sistemas Magneto Optical incorporan un soporte magnético de grabación, y mediante la cooperación de un láser y un campo magnético se consigue realizar la lectura/escritura: el láser calienta el punto de memoria a unos 150o C, con lo que puede modificarse su estado de polarización magnética mediante el campo correspondiente (a altas temperaturas la coercitividad o resistencia a variaciones de orientación magnética de los materiales disminuye). La lectura en los sistemas estos sistemas (MO) se realiza reduciendo la potencia del láser, lo que evita el calentamiento del soporte. La posibilidad de lectura de un soporte magnético mediante un elemento óptico se explica teniendo en cuenta que el haz láser está polarizado, y el estado magnético de las partículas del soporte hace que la polarización del haz varíe, detectándose este cambio por el fotodetector.
La diferencia fundamental que separa a esta tecnología de las dos anteriores es que éstas se basan en un cambio físico producido en el soporte que modifica la reflexión. En contraste, esta tecnología produce un cambio de una propiedad magnética, no de estado físico en sí, lo que la hace superior a las dos anteriores puesto que los cambios físicos reales reducen sensiblemente la vida del soporte. Estas unidades presentan todavía una serie de inconvenientes, debido a los altos campos magnéticos que requieren, lo que hace que las cabezas de lectura-grabación sean voluminosas y pesadas, con lo que se hace más lento su movimiento. Además, antes de efectuar una escritura es necesario efectuar el borrado de la información existente, pues es requisito del proceso de escritura que la alineación magnética de las partículas del soporte sea la misma al comenzar dicho proceso.
Las unidades MO trabajan con un único surco en el soporte, y al disponer únicamente de una cabeza de lectura-escritura, como el disco presenta información en sus dos caras, sólo la mitad de la capacidad de almacenamiento está en un momento dado disponible.
3.3.2. DVD (Digital Versatile Disk)
DVD utiliza el mismo formato físico que CD-ROM, pero es completamente distinto de todo lo anteriormente explicado. Ante la necesidad de más capacidad, sobre todo en el almacenamiento de vídeo, se ha creado un nuevo formato que revolucionará en los próximos años el mundo del almacenamiento de datos y los sistemas multimedia.
Este sistema permite el almacenamiento de 4.7 GB a 17 GB de datos, suficiente para almacenar una película de larga duración y se espera de él que sustituya a los actuales videos VHS, a los CD-ROM y a los láser-Disk. La especificación DVD soporta discos de gran capacidad con tasas de acceso de 600KBps a 1.3 MBps. Además las unidades DVD permiten leer los CD-ROM estándar, CD-I y vídeo CD.
Se requieren dos moldes para hacer un disco DVD, que consta de dos discos de 0'6 mm pegados, que se unen en un proceso de unión en caliente para los de una capa y con un proceso de unión para los de dos capas. En los de doble capa, se añade una capa semi-reflectante para que se puedan leer ambas capas desde una misma cara del disco.
Figura 3.8. Proceso de lectura de un DVD
El secreto para la alta capacidad en una superficie igual a la de los CDs es que el tamaño mínimo de una marca en un DVD de una cara es de 0'44 micras, frente a las 0'83 micras del CD; además, la distancia entre marcas es de 0'74 micras, frente a las 1'6 micras para el CD. Todo ello da lugar a la posibilidad de hacer hasta 4 veces más marcas que en un CD, es decir, a mayor densidad de datos, o lo que es lo mismo, mayor capacidad.
El tamaño más pequeño de cada marca, por tanto, implica también un láser de menor longitud de onda, que en el DVD es de 635 a 650 nanómetros, frente a los 780 nanómetros del láser del CD. Otra característica importante es que la segunda capa de datos del disco DVD puede leerse desde la misma cara que la primera capa o desde la cara contraria, pero los datos se almacenan en una pista espiral inversa, de modo que el láser solamente tiene que hacer un pequeño ajuste muy rápido para leer la segunda capa.
Hay dos tamaños físicos: 12cm (4.7 pulgadas) y 8 cm (3.1 pulgadas), ambos 1.2 mm de grueso. Son las mismas dimensiones que el CD. Un disco DVD puede ser de una cara o de dos caras. El disco DVD puede llegar a almacenar hasta 17GB de información, con transferencias superiores al CD-ROM y con tiempos de acceso similares. Existen 4 versiones del DVD atendiendo a su capacidad:
* DVD-5: de una sola cara, con una sola capa y una capacidad de 4'7GB.
* DVD-9: de una sola cara, con doble capa y una capacidad de 8'5GB.
* DVD-10: de doble cara, con una sola capa y una capacidad de 9'4GB.
* DVD-18: de doble cara, con doble capa y una capacidad de 17GB.
Cada lado puede tener una o dos capas de datos. La cantidad de vídeo que un disco puede almacenar depende de cuanto audio acompañe al disco y de lo fuertemente que este comprimido el audio y el vídeo. A una aproximada velocidad media de 4.7 Mbps (3.5 Mbps para vídeo, 1.2 Mbps para tres pistas de audio de 5.1 canales), un DVD de simple capa contiene sobre dos horas. Una película de dos horas con tres pistas sonoras puede tener una media de 5.2 Mbps. Un disco de doble capa puede almacenar una película de dos horas a una media de 9.5 Mbps.
Fig. 3.9. DVD´s de una o dos caras, una o dos capas y distintas capacidades
Fueron las compañías cinematográficas las primeras en pensar en un CD de alta capacidad, con mejor calidad sonora y visual y más barato que las cintas VHS. Así, utilizando MPEG-2 como protocolo de compresión, el mismo de la televisión digital, es posible almacenar una película completa con sonido digital multicanal en un disco DVD. El DVD-Vídeo es generalmente codificado desde las cintas master de estudio digital a formato MPEG-2.
En el proceso de compresión se elimina información redundante (tales como áreas de la imagen que no cambian) e información que no es fácilmente perceptible por el ojo humano. El vídeo resultante, especialmente cuando es complejo o de imagen cambiante rápidamente, podría ser tal que tuviese falta de trozos de imagen, imagen borrosa y ruido de vídeo dependiendo de la calidad del procesado y de la cantidad de compresión.
A velocidades medias de 3.5 Mbps (millones de bits/segundo) estos dispositivos podrían ser ocasionalmente reconocibles. Velocidades mayores pueden dar mayor calidad sin casi diferencia perceptible con el master original a velocidades sobre 6Mbps. Mientras la tecnología de compresión MPEG avanza, se consigue mejor calidad a menores velocidades.
La principal desventaja de los DVD es que pasaran años hasta que las películas y software de ordenador estén ampliamente disponibles.
Formatos y sus características
1. DVD-ROM
Método de almacenamiento de sólo lectura de alta capacidad. Las principales diferencias con el CD-ROM son su capacidad a partir de 4'7Gb, la posibilidad de utilizar las dos caras del disco, doblando así la capacidad anterior, y la posibilidad de grabar en cada cara dos capas de datos, multiplicando así la cantidad inicial y pudiendo llegar a alcanzar 17GB de almacenamiento.
Tanto externamente como internamente las unidades CD-ROM y DVD-ROM son bastante similares. Sin embargo, existe una diferencia importante en el láser: el láser tiene dos lentes sobre un eje que se intercambian, una para leer DVD's y la otra para leer CDs. En cuanto a la velocidad, tenemos que tener en cuenta que un DVD 1x transfiere datos a 1.250KB/s, equivalente a una unidad de CD-ROM 8x, y en 1998 se han hecho populares las unidades DVD 2x, con una transferencia de 2.700KB/s, equivalentes a un CD 18x y han empezado a parecer las unidades DVD 5x, con una trasferencia de 3'5MB/s. Las unidades DVD-ROM inicialmente tuvieron ciertos problemas de compatibilidad con los discos CD-R y CD-RW, porque la reflectividad de la superficie de estos discos los hacía imposibles de leer para la mayoría de las unidades DVD. Para los CD-RW, esto se resolvió con un láser de longitud de onda dual, y desde finales de 1998, disponemos de unidades DVD capaces de leer cualquier tipo de discos grabables o regrabables, tanto por CD como por DVD.
2. DVD-Vídeo
Permite el almacenamiento digital de películas. Los discos DVD-Vídeo utilizan la compresión MPEG-2 para almacenar vídeo, y en países como Estados Unidos, almacenan también sonido digital envolvente AC-3. La calidad de una película almacenada en DVD con compresión MPEG-2 es muy superior a la de un vídeo VHS, ya que utiliza 480 líneas horizontales con una resolución de 780x420 píxeles, frente a 425 líneas del LASERDISC o las 250 a 270 líneas para VHS. Además, una película DVD permite escoger entre formato estándar 4:3 y formato 16:9, y en cuanto a sonido, hasta 8 idiomas diferentes y hasta 32 diferentes subtítulos. Un disco DVD de una sola cara puede almacenar 133 minutos de video comprimido de alta calidad, con sonido envolvente en tres idiomas y cuatro canales de subtítulos.
3. DVD-Audio
Es similar al CD-Audio, pero de mayor capacidad. Con el DVD se pueden obtener grabaciones con una frecuencia de muestreo de 96kHz de 24 bits, frente a los 16 bits y 44'1kHz del CD actual. La ventaja más importante del DVD-Audio es la posibilidad de incorporar vídeo con la música y su capacidad de 2 horas de sonido envolvente o 4 horas de sonido estéreo con el estándar DVD5.
4. DVD-R
Permite una sola grabación y múltiples lecturas; es similar al CD-R. El DVD-R o DVD grabable apareció poco después del DVD-ROM e inicialmente alcanzó una capacidad de 3'95Gb por cada cara. La unidad grabadora DVD crea discos compatibles con casi todas las unidades DVD utilizando discos similares a los CD-R.
5. DVD-RAM
Variante grabable y regrabable del DVD; similar al CD-RW. Los discos DVD-RAM vienen dentro de cartuchos, imprescindibles para realizar la grabación, pero solamente algunos tipos de cartuchos permiten sacar el disco una vez grabado para ser leído por la unidad DVD-ROM, por lo que mientras no se fabriquen unidades capaces de leer los discos dentro del los cartuchos, las unidades DVD-RAM quedan destinadas solamente a copias de seguridad personales pero no universalmente compatibles. Sin embargo, una posible ventaja de estas unidades es que además de permitir grabar, borrar y regrabar los datos alcanzando capacidades de hasta 4'7GB, son capaces de leer discos CD-ROM, CD-R y CD-RW, además de los discos DVD-ROM.
3.4. UNIDADES DE ALMACENAMIENTO MASIVO
Es una unidad de almacenamiento removible, conectable a un puerto, que utiliza unos cartuchos parecidos a los disquetes, pero que logran contener 100 Mb. en datos.
Una de estas unidades es la Zip de Iomega, que con el tiempo se ha ido convirtiendo en una seria alternativa al disquete de 1,44. La unidad ZIP es un excelente periférico que nos permite una gran acumulación de datos a bajo coste y con una velocidad de acceso igual o mejor que la de un disco duro. Se han creado unidades conectables al puerto IDE y a la salida paralelo del ordenador, habiendo, por tanto unidades internas y externas. También se ha conseguido que muchos fabricantes de placas base incorporen en sus ROM's código para hacerlas autoarrancables, y así poder sustituir por completo a la disquetera tradicional. Es una de las unidades más extendidas actualmente.
Utiliza cartuchos de un tamaño muy similar a los disquetes de 3 pulgadas y media con capacidad de 100 Mb sin comprimir. La velocidad de transferencia es de 380 Kb/s para la versión en paralelo y de 1.024 Kb/s para la versión SCSI. Los disquetes se protegen mediante software y no con lengüeta. La mayor ventaja de estas unidades es su bajo precio y su facilidad de uso, a costa de una escasa capacidad comparando con otros sistemas de almacenamiento.
También por el mismo fabricante existe otro dispositivo llamado Iomega JAZ que es similar a la ZIP. Esta unidad utiliza cartuchos de hasta 2'5 Gb sin comprimir, por lo que podemos grabar en ellos más de dos horas de sonido en calidad CD o más de 56 minutos de vídeo. Funciona mediante conexión SCSI-2 con una velocidad de transferencia de 1´7 Mb/s y es como tener discos duros removibles.
Otra de ellas es Imation LS-120 de Imation (actualmente una división de 3M). Esta unidad es capaz de leer y grabar en todos los formatos del estándar de 3 1/2, pero que también permite, con unos disquetes especiales y en un nuevo formato, almacenar 120 Mb. Esta unidad recibe el nombre de LS-120, y actualmente algunas empresas como Panasonic, ya están comercializando unidades tanto externas, conectables al puerto paralelo, como internas conectables al IDE. Al igual que la ZIP de Iomega, también está implementada en la ROM de algunos ordenadores para ser usada como unidad de arranque. Esta unidad debería haberse convertido ya en el disquete del siglo XXI. Sus características son discos de 120 Mb de capacidad en tres pulgadas y media y 525 Kb/s de transferencia. Pero lo mejor, es totalmente compatible con los viejos discos de 3 y media (tanto 720 Kb como 1440 KB). Además lee y graba los viejos discos el triple de rápido.
Otra más es la denominada Sony HiFD. Ha surgido hace poco tiempo, pero constituye un serio peligro para los dos anteriores, por dos motivos: El primero es que lo ha desarrollado el gigante Sony junto con Fuji Film, y el segundo que técnicamente es superior a los demás. A esto hay que unirle el hecho de que ninguno de los anteriores ha conseguido hacerse con el estándar en todo este tiempo. También hay que tener en cuenta que Sony fue la inventora del actual disquete de 3 1/2. Esta unidad, a la que le han puesto el nombre de HiFD, cuenta con compatibilidad total con los anteriores formatos de 3 1/2, permite almacenar hasta 200 Mb. y es bastante más rápida que sus rivales, sobretodo la LS-120, la más lenta del grupo y la más perjudicada.
DynaMO: Este dispositivo es el primero de los que podemos llamar “súper disquetes”, con una capacidad entre los 200MB y los 300MB, y a la vez pueden utilizarse como complemento a la disquetera o incluso como unidad de copia de seguridad, aunque su capacidad limita su utilización a campos muy concretos. El DynaMO de Fujitsu es una unidad magneto-óptica que ha ido apareciendo en el mercado en diversas versiones según su capacidad, que inicialmente era de 128Mb, aumentó a 230MB y en su última versión ha alcanzado los 640MB. Existen versiones IDE interna, SCSI externa y puerto paralelo, y sus prestaciones son bastante buenas. Apoyada por una caché interna de 128KB, estas unidades alcanzan una velocidad de búsqueda de 65ms y una tasa de transferencia de 1'6MB/s, aunque la versión puerto paralelo es considerablemente más lenta. En su versión de 640MB, esta unidad alcanza los 35ms de tiempo de búsqueda y una tasa de transferencia de 2,4MB/s, debido a su velocidad de rotación de 3.600rpm y su caché interna aumentada a 2MB.
EZFlyer: La unidad EZFlyer de Syquest utiliza tecnología magnética para ofrecer unas prestaciones algo superiores a la unidad ZIP con un tiempo medio de búsqueda de 18ms y una tasa de transferencia de 2MB/s en su versión SCSI, aunque también existe una versión para puerto paralelo. Por su capacidad de 230MB y sus prestaciones, esta unidad es válida tanto para hacer copias de seguridad como para ejecutar aplicaciones o archivos de vídeo desde ella.
4. PERIFÉRICOS DE COMUNICACIÓN IMPRESA
4.1. IMPRESORAS
Las impresoras son dispositivos de salida que escriben la información sobre papel. Las impresoras son, junto a los monitores, los dispositivos más utilizados para poder ver en forma directamente inteligible para el hombre los resultados de un programa de ordenador. Son dispositivos de salida de datos que permiten la impresión de la información sobre un soporte de escritura permanente, el papel. Existe una amplia gama de impresoras, con velocidades de impresión muy distintas.
La conexión al ordenador de una impresora se realizará, normalmente, mediante el puerto paralelo estándar. Si bien en las matriciales no es necesario, a la hora de adquirir una impresora de inyección o láser es prácticamente imprescindible que el puerto paralelo de nuestro ordenador sea bidireccional. Esto es así debido a que estas impresoras no sólo reciben datos del PC, sino que también pueden enviarle información, en forma de notificación de errores o situaciones anómalas, respuestas a códigos de control, etc. De hecho, el funcionamiento de los drivers y paneles de control vía software de estas máquinas se basa en esa premisa, e incluso algunos modelos ni siquiera instalarán su software de control si no detectan una conexión bidireccional. En ordenadores actuales, ya se incluye de fábrica el puerto paralelo ECP/EPP (Enhanced Parallel Port), y únicamente hay que verificar si está activada dicha característica en el Setup. Sin embargo, en máquinas más antiguas no se implementan estos puertos.
Prácticamente todas las impresoras, independientemente de la tecnología empleada, incluyen una memoria RAM. En las matriciales puede ser de unos pocos bytes (8 Kb, 16 Kb, etc.), y no mucho más en las de inyección. Por el contrario, en las láser sí que es imprescindible una buena cantidad de memoria, que no suele bajar de 512 Kb, aunque la verdad es que lo mínimo admisible debe ser, al menos, 1 Mega.
Las impresoras se pueden clasificar de la siguiente forma, según el mecanismo de impresión:
4.1.1. - IMPRESORAS DE IMPACTO
Las impresoras matriciales se basan en una matriz de agujas (también se pueden llamar impresoras de agujas) que percuten individualmente sobre una cinta entintada que marca el papel. Las más habituales eran las de nueve y las de veinticuatro agujas. Es sabido que no tienen una forma definida y que pueden imprimir gráficos y cualquier tipo de fuente dentro de sus limitaciones de resolución. Son las más ruidosas y mecánicamente las más delicadas.
La ventaja de este tipo de impresoras y la razón por la que todavía se utilizan es el hecho de que se basan en la percusión, lo que permite utilizarlas para los impresos múltiples.
La impresora matricial (o de agujas) forma los caracteres uno a uno basándose en puntos, impresos a través de la cinta entintada por unos punzones redondeados activados por electroimanes. Hay tantos electroimanes como filas de puntos por carácter (en general 8). Permiten varios juegos de caracteres y posibilidad de imprimir gráficos. La velocidad de impresión oscila entre 30 y 300 caracteres por segundo (cps). (fig. 4.1)
Figura 4.1. Impresión en una impresora matricial
Son impresoras comunes la matriciales de 24 agujas (en realidad no se trata de impresoras de 24 agujas sino de agujas en forma matricial de 24x24).
Las impresoras matriciales han sido muy empleadas durante muchos años, ya que las otras tecnologías han sido desarrolladas posteriormente, y en un principio eran muy caras. Hoy en día han sido sustituidas en muchos entornos por sus competidoras, pero todavía son irreemplazables en algunas tareas. Para empezar, son imprescindibles en trabajos donde haya que imprimir sobre papel de copia, es decir, con más de una hoja; esto engloba todo tipo de oficinas y centros, públicos o privados, que empleen ese tipo de papel.
A pesar de que en un principio se desarrolló la tecnología matricial en color como competencia directa con las de inyección de tinta, actualmente las impresoras que encontramos suelen ser monocromas, ya que no es la tecnología más adecuada para la impresión de colores, sobretodo en modos gráficos.
Sus principales características son su elevado ruido, y su poca definición, pero en la vertiente de ventajas podemos considerar su economía tanto en compra como en mantenimiento. Aunque hoy en día sus precios de compra van parejos a los de las impresoras de inyección a tinta, las segundas ofrecen más ventajas. Son sólo aconsejables para la impresión de texto, siempre que éste no requiera gran calidad, y mayormente cuando empleamos papel continuo.
4.1.2. IMPRESORAS TÉRMICAS
De mecanismo equivalente a las impresoras matriciales, pero utilizando papel termosensible y agujas de impresión por calentamiento. Son mecánicamente sencillas y silenciosas, pero poco utilizadas por ser el papel térmico caro y poco estable. Otras impresoras de este tipo, que gozan de mayor difusión, sustituyen el papel térmico por una cinta térmica, que actúa como cinta entintada. Para imprimir sobre la página, las agujas del cabezal de impresión se calientan una fracción de segundo, fundiendo la cera de la tinta, que se plasma sobre el papel.
Para obtener mayor velocidad, se sustituye el cabezal móvil por uno fijo de la anchura de la página. La sincronización y el tiempo de calentamiento de los elementos del cabezal de impresión deben estar perfectamente controlados, para evitar el calentamiento de elementos de impresión no deseados por transmisión térmica, ya que la distancia entre ellos es muy reducida.
El principio de funcionamiento de estas impresoras es similar al de las impresoras de agujas, la única diferencia es que en lugar de percutir sobre una cinta entintada, las agujas están calientes y percuten sobre un papel sensible al calor. Se emplean principalmente en la impresión de códigos de barras.
4.1.3. IMPRESORAS POR INYECCIÓN A TINTA
Las impresoras de inyección de tinta o de chorro de tinta permiten obtener resultados de gran calidad, tanto en gráficos como en texto, a un precio relativamente bajo. Aunque en un principio se preferían las matriciales, hoy son las reinas indiscutibles en el terreno domestico.
Su funcionamiento se basa en la expulsión de gotas de tinta líquida a través de unos inyectores que impactan en el papel formando los puntos necesarios para la realización de gráficos y textos. La impresión se realiza mediante la aplicación de una carga eléctrica que hace saltar una minúscula gota de tinta por cada inyector, sin necesidad de impacto.
Imprimen los caracteres de forma similar a como se producen en un CRT, mediante un fino chorro de tinta pulverizada cuyas gotas están cargadas de electricidad estática, por lo que la trayectoria del chorro puede gobernarse mediante dos campos eléctricos perpendiculares.
Figura 4.3. Impresoras por chorro de tinta
La tinta se obtiene de unos cartuchos reemplazables que dependiendo del tipo de impresora pueden ser más o menos. Algunas impresoras utilizan dos cartuchos, uno para la tinta negra y otro para la de color, en donde suelen están los tres colores básicos. Estas impresoras tienen como virtud la facilidad de manejo, pero en contra, si utilizamos más un color que otro, nos veremos obligados a realizar la sustitución del cartucho cuando cualquiera de los tres colores se agote, aunque en los demás compartimentos todavía nos quede tinta de otros colores. Esto hace que estas impresoras sean bastante más caras de mantenimiento que las que incorporan un cartucho para cada color, pero también suelen ser más económicas. También podemos encontrar las famosas impresoras con calidad fotográfica, que suelen contar con cartuchos de 4 colores en vez de 3.
Los cartuchos de tinta son relativamente caros, debido a que generalmente no sólo contienen la tinta, sino parte o la totalidad del cabezal de impresión; este sistema asegura que el cabezal siempre está en buen estado, pero encarece el precio. Existen decenas de sistemas de recarga de cartuchos para rellenar el cartucho aprovechando el cabezal, pero en el 99% de los casos son un engorro y se pone todo perdido de tinta
Las características principales son la velocidad, que se mide en páginas por minuto (ppm) y que suele ser distinta dependiendo de si imprimimos en color o en monocromo, y la resolución máxima, que se mide en puntos por pulgada (ppp). La resolución de estas impresoras es en teoría bastante elevada, hasta de 1.440 ppp, pero en realidad la colocación de los puntos de tinta sobre el papel resulta bastante deficiente, por lo que no es raro encontrar que el resultado de una impresora láser de 300 ppp sea mucho mejor que el de una de tinta del doble de resolución. Por otra parte, suelen existir papeles especiales, mucho más caros que los clásicos folios de papelería, para alcanzar resultados óptimos a la máxima resolución o una gama de colores más viva y realista.
El principal destinatario de este tipo de impresoras es el usuario doméstico, además del oficinista que no necesita trabajar con papel continuo ni con copias múltiples pero sí ocasionalmente con color (logotipos, gráficos, pequeñas imágenes...) con una calidad aceptable.
4.1.1. IMPRESORA LÁSER
Impresora láser es una impresora electro-fotográfica que utiliza la misma tecnología que las fotocopiadoras. Se basan en un láser que ioniza un rodillo para que se impregne de tinta de forma selectiva y al pasar sobre la superficie a imprimir plasma el gráfico o texto deseado.
Para dibujar la imagen de la página deseada se utilizan un rayo láser dirigido y un espejo giratorio, que actúan sobre un tambor fotosensible. La imagen se fija en el tambor en forma de carga electrostática que atrae y retiene el tóner. Se enrolla una hoja de papel cargada electrostáticamente alrededor del tambor, de forma que el tóner depositado se queda pegado al papel. A continuación se calienta el papel para que el tóner se funda sobre su superficie. Por último, se elimina la carga eléctrica del tambor y se recoge el tóner sobrante. Para hacer varias copias de una misma imagen, se omite este último paso y se repiten sólo la aplicación del tóner y el tratamiento del papel.
Son impresoras que actualmente gozan de una gran difusión, por su versatilidad, la calidad de su impresión, su velocidad y su bajo nivel de ruido.
El tambor giratorio es de aluminio del mismo ancho que el papel y de diámetro adecuado para que la longitud de la hoja coincida con su superficie lateral.
Figura 4.4. Impresora láser
Dicha superficie, sensible a la carga eléctrica, permite ser cargada con electricidad estática. Un haz láser no móvil, modulado en intensidad según la información a presentar, puede barrer toda la anchura del tambor, mediante un sistema óptico adecuado. El propio giro del tambor permitirá que el haz alcance todos los puntos de su superficie. Primero se carga la superficie del tambor, y después, mediante el láser, se elimina la carga en las zonas en las que no se desea entintar. Luego, el tambor se expone a un polvo tóner (compuesto de partículas negras de una sustancia sensible a la carga eléctrica), que se adhiere a las zonas del tambor cargadas estáticamente. Este tóner pasa al papel al aproximar éste sobre el tambor (es demasiado abrasivo como para permitir el contacto), siendo finalmente fijado mediante calor, generado por una unidad térmica. No todas las partículas de tóner pasan al papel (sólo un 70%). Para evitar que las siguientes imágenes impresas presenten suciedad, se limpia el tóner restante del tambor mediante un filtro micrónico, además de eliminar la carga residual (ver fig. 4.5).
Para generar la señal que modula la intensidad del láser, hay que realizar previamente la operación de formado de la imagen, traduciendo el texto alfanumérico y las órdenes gráficas, enviadas por el ordenador, en una matriz de bits, que determinan la intensidad del haz láser en cada punto de la página.
La formación de caracteres se basa en la misma técnica que utilizan las impresoras matriciales, generándose patrones que permanecen almacenados, usualmente en una ROM incluida en un dispositivo denominado cartridge o cartucho.
Figura 4.5 Impresora láser
La técnica de impresión expuesta antes se conoce como método indirecto. Existe otra técnica, conocida como impresión electrostática o método directo, en la que un cabezal especial pasa directamente la carga eléctrica al papel, cargado mediante un electrodo, sin intervención del tambor. El principal inconveniente reside en la necesidad de emplear papeles especiales, impregnados de un material que retiene la carga eléctrica. A cambio, la ausencia de tambor reduce considerablemente los costes, si bien este método no ha tenido mucho éxito.
La calidad de impresión se mide en puntos por pulgada (ppp o dpi), es decir, el número de puntos que, tanto horizontal como verticalmente podrían distinguirse en una pulgada cuadrada. Estas impresoras es que pueden llegar a velocidades muy altas, medidas en páginas por minuto. Su resolución también puede ser muy elevada y su calidad muy alta. Empiezan a ser habituales resoluciones de 1.200 ppm (puntos por pulgada) y velocidades de 16 ppm, aunque esta velocidad puede ser mucho mayor en modelos preparados para grupos de trabajo, hasta 40 ppm y más.
El proceso de impresión láser en color no ha sido bien desarrollado hasta el momento. La técnica usual consiste en realizar para cada hoja tres procesos de impresión sucesivos, uno por color básico (lo que produce más lentitud en la impresión). Esto complica el método expuesto anteriormente, puesto que hay que analizar primero las características de color de la imagen a imprimir. Además, al llegar la fase térmica de un determinado color tienden a fundirse los colores fijados anteriormente. Otro procedimiento para añadir color a las copias en blanco y negro, y que es válido para cualquier fotocopiadora o impresora láser, es el uso de un determinado dispositivo que se vale de hojas de color, con una emulsión especial. Al calentarla, sale de su soporte y se adhiere al tóner. No necesita utilizar papel especial.
Las peculiares características de estas impresoras obligan a que dispongan de su propia memoria para almacenar una copia electrónica de la imagen que deben imprimir. A mayor tamaño y calidad de impresión necesitaremos mayor cantidad de memoria, que estará entorno a 1 ó 2 MB; si el documento a imprimir fuera muy largo y complejo, por ejemplo con varias fotografías o a una resolución muy alta, puede producirse un error por overflow (falta de memoria). La memoria es importante para actuar como “buffer” en donde almacenar los trabajos que le van llegando y para almacenar fuentes y otros motivos gráficos o de texto que permitan actuar como “preimpresos” e imprimirlos en cada una de las copias sin necesidad de mandarlos en cada página.
Las impresoras láser son muy resistentes, mucho más rápidas y mucho más silenciosas que las impresoras matriciales o de tinta, y aunque la inversión inicial en una láser es mayor que en una de las otras, el tóner sale más barato a la larga que los cartuchos de tinta, por lo que a la larga se recupera la inversión. Por todo ello, las láser son idóneas para entornos de oficina con una intensa actividad de impresión, donde son más importantes la velocidad, la calidad y el escaso coste de mantenimiento que el color o la inversión inicial.
4.2. PLOTTERS
Los trazadores de gráficos (en inglés “plotters”) son dispositivos de salida que realizan dibujos sobre papel. Estos periféricos tienen gran importancia ya que con ellos se obtienen directamente del ordenador salidas en forma de planos, mapas, dibujos, gráficos, esquemas e imágenes en general. Se trata de unos aparatos destinados a la impresión de planos para proyectos de arquitectura o ingeniería, por lo que trabajan con enormes formatos, DIN-A1 (59,4x84 cm) o superiores.
Antiguamente consistían en una serie de plumillas móviles de diferentes grosores y colores que se movían por la hoja reproduciendo el plano en cuestión, lo que era bastante incómodo por el mantenimiento de las plumillas y podía ser impreciso al dibujar elementos tales como grandes círculos. En la actualidad casi todos tienen mecanismos de inyección de tinta, facilitando mucho el mantenimiento, que se reduce a cambiar los cartuchos; son auténticas impresoras de tinta, sólo que el papel es mucho más ancho y suele venir en rollos de decenas de metros.
El funcionamiento de un plotter se controla desde programa. El usuario puede incluir en su programa instrucciones para realizar las representaciones que desee con sus datos. Los plotters se fundamentan en el desplazamiento relativo de un cabezal con el elemento de escritura, con respecto al papel. Dependiendo del tipo de gráfico se moverá sólo la cabeza, o la cabeza y el papel.
Existen dos tipos básicos: el de tambor vertical y el de plataforma.
Los plotters de tambor vertical poseen un rollo de papel que está continuamente enrollándose o desenrollándose sobre un tambor rotatorio, en secuencia con el movimiento de la pluma. El papel puede ser continuo o una simple hoja unida a una cinta en movimiento que pasa alrededor del tambor. Este tipo de plotters es normalmente más rápido, más barato y ocupa menos espacio que el plotter de plataforma. Permite además realizar dibujos de gran longitud, utilizando un rollo de papel continuo, aunque habitualmente se diseña para hojas de papel de tamaño A0.
Los plotters de plataforma utilizan una hoja de papel apoyada sobre una superficie plana horizontal mientras que la pluma se mueve automáticamente y libremente sobre ella, gracias a dos carriles paralelos sobre los que se dispone un puente que incorpora el cabezal donde se alojan las plumillas, móvil según la dirección perpendicular a la de los carriles. La escala de tamaños de papel varía de A3 a A0. Este tipo de plotters produce dibujos más nítidos que los de tipo vertical. También pueden admitir hojas de otros tipos de material, como ciertos tipos de plásticos o acero.
Estos tipos de plotters se denominan vectoriales. Este término se refiere (dentro del contexto de generación de gráficos por ordenador) a que la construcción de imágenes se realiza a partir de líneas o segmentos y rellenado de zonas, en oposición a los dispositivos tipo raster, como los monitores CRT o las impresoras matriciales o láser, donde la construcción de la imagen se hace mediante píxeles. La técnica de gráficos por barrido o raster implica el almacenamiento de una imagen como una matriz de bits (o bytes, dependiendo de la cantidad de información que deba asociarse a cada elemento de la matriz) bidimensional. El problema básico al utilizar matrices de bits es que éstas tienen siempre un tamaño fijo. Esto está asociado a la resolución de cada dispositivo en particular. Se puede mostrar una matriz de bits con un tamaño menor o mayor, pero el resultado es normalmente poco satisfactorio. Para reducir la imagen habrá que eliminar filas o columnas enteras de píxeles de la imagen, lo que podría significar la pérdida de información importante, mientras que para ampliar el tamaño original de la matriz de bits, es necesario duplicar, o triplicar, quizás incluso cuadruplicar, algunas filas o columnas, lo que produce un aspecto pobre en resolución, quebrado o granulado, particularmente en líneas curvas y en texto. Sin embargo, los gráficos generados por barrido son ideales para almacenar y reproducir fotografías digitalizadas, mientras que los gráficos vectoriales son ideales para diseño asistido por ordenador (CAD), donde el proceso de diseño emplea sofisticadas técnicas gráficas, además de requerir software complementario. Siempre es posible combinar ambas técnicas.
Además de los plotters ya descritos, existen otros tipos, ampliamente utilizados:
Los plotters electrostáticos son dispositivos crean dibujos a partir de barridos horizontales con un principio semejante al de los monitores CRT y a las impresoras matriciales. Disponen de un rodillo de papel especial que pasa a través de una cabeza de escritura que contiene cientos de diminutos electrodos dispuestos en forma de regleta delgada.
El dibujo se forma cuando el modelo formado por los diminutos puntos creados por los electrodos pasa a través de un baño de tóner. Una ventaja particular de los trazadores electrostáticos es su posibilidad de producir dibujos si requerir especiales atenciones. No es posible, como ocurre con los trazadores vectoriales, que sus plumas se sequen en cualquier momento. Tienen las desventajas de su alto coste y de efectuar impresión línea a línea.
Los plotters de inyección operan con un principio similar a los electrostáticos, creando imágenes formadas por finos puntos. En este tipo de plotters, sin embargo, la cabeza de escritura consta de un carro que contiene los inyectores, los cuales disparan un volumen controlado de tinta a intervalos regulares de tiempo. El carro viaja lentamente a lo largo de un tambor que gira continuamente, al que está adherido el papel. Cada inyector conforma un tono de un color primario, pudiéndose crear un amplio rango de imágenes en color combinando los primarios y variando la intensidad de los inyectores. El plotter de inyección de tinta puede realizar todos los efectos artísticos del electrostático, teniendo ambos dispositivos una competencia muy directa en estas aplicaciones.
Es posible emular un plotter mediante una impresora láser, disponiendo de cartridge y software adecuado, obteniendo un resultado de mayor calidad en menor tiempo.
4.3. TABLETAS DIGITALIZADORAS
Las tabletas digitalizadoras (o digitalizador) son unidades de entrada que generan las coordenadas de un puntero móvil en el plano o incluso en el espacio (modelos tridimensionales). El puntero puede ser un lápiz o un cursor móvil, que un operador puede desplazar siguiendo un dibujo u objeto. El puntero puede disponer de pulsadores para seleccionar la función deseada del computador, por ejemplo, para marcar un punto, solicitar digitalización continua o parar dicha digitalización. Es éste un periférico que nos permite utilizar un ratón como si fuera un bolígrafo. De hecho las tablas digitalizadoras vienen acompañadas de su correspondiente bolígrafo; con el que nosotros escribimos sobre la tabla. Esa información es enviada al ordenador que nos muestra los resultados de nuestras acciones en pantalla.
Todo digitalizador consta de tres elementos:
-
Tabla: Donde se ubica el dibujo a digitalizar (puede ser opaca o transparente).
-
Mando: Con el que el usuario debe recorrer el dibujo. Este suele tener forma de lápiz o cursor, y está unido al resto del sistema por un cable flexible. En el último caso el cursor tiene una ventana cerrada con una lupa, en cuyo interior se encuentra embebida una retícula en forma de cruz para señalar o apuntar con precisión el punto a digitalizar. El mando puede disponer de uno o varios pulsadores para controlar la modalidad de funcionamiento, forma de transmisión y selección de opciones del programa que gestiona la digitalización.
-
Circuitos electrónicos: Controlan el funcionamiento de la unidad.
En la digitalización continua, el ordenador va tomando cada cierto tiempo las coordenadas del puntero, por lo que se puede captar cualquier tipo de movimiento descrito por éste. Con esto se pueden dibujar curvas de cualquier tipo. Existen distintos métodos para determinar la posición del puntero:
Métodos mecánicos, en los que el puntero está físicamente conectado a los sensores por un procedimiento semejante al de un plotter. Estos sensores son capaces de determinar las distancias en el plano por el giro de unas ruedas solidarias con los brazos móviles. Estos digitalizadores son incómodos de usar, por lo que no están muy difundidos.
Métodos electrónicos, en los que el puntero tiene movimiento libre, permitiendo más comodidad. Para la detección de su posición existen distintas técnicas, entre las que destacan las mesas electroacústicas, las mesas electrostáticas y los lápices acústicos. En las mesas electroacústicas se emiten ondas de superficie por la mesa, estando dotado el lápiz de un sensor que, al estar apoyado sobre ella, detecta el paso de estas ondas. Una onda avanza paralela al eje X y otra al Y, por lo que si medimos el tiempo que tardan desde su generación hasta su detección por el lápiz, se conocen las coordenadas del punto. Una técnica, válida tanto para digitalizadores tanto 2D como 3D, es la del lápiz acústico. Este emite una señal acústica que es detectada por dos o tres sensores de tipo micrófono de barra, perpendiculares entre sí, lo que permite detectar sus coordenadas.
La resolución de los digitalizadores se sitúa alrededor de la décima de milímetro, y la velocidad de digitalización puede ser superior a las 60 coordenadas por segundo.
4.4. SCANNERS
Los scanners ópticos son unos dispositivos de entrada para el ordenador que utilizan un haz luminoso para detectar los patrones de luz y oscuridad (o los colores) de la superficie del papel, convirtiendo la imagen en señales digitales que se pueden manipular por medio de un software de tratamiento de imágenes o con reconocimiento óptico de caracteres. La necesidad de incorporar diagramas, fotografías y gráficos ha hecho de la autoedición la aplicación predominante de los scanners. Además, el software gráfico suplementario permite posibilidades de manipulación de la imagen digitalizada.
Los programas que controlan el scanner suelen presentar la imagen capturada en la pantalla. Los colores no tienen porqué ser necesariamente los originales. Es posible capturar las imágenes en blanco y negro o transformar los colores mediante algún algoritmo interno o modificar y mejorar la imagen. Sin embargo, y en general, los colores que produce un scanner suelen ser los correctos.
Transforma las imágenes a formato digital, es decir en series de 0 y de 1, pudiendo entonces ser almacenadas, retocadas o impresas o ser utilizadas para ilustrar un texto. Si el documento que se desea escanear es un texto, por medio de programas de reconocimiento de caracteres, también llamados por las siglas inglesas OCR (Optical Character Recognition), es posible reconstituirlo y convertirlo en texto reconocible por el ordenador, pudiendo ser corregido o añadir texto nuevo, es decir, nos evita tener que teclearlo.
Un scanner se compone de dos piezas básicas: la primera de ellas es el cabezal de reconocimiento óptico, la segunda es un simple mecanismo de avance por debajo de un cristal que hace las veces de soporte para los objetos que se van a escanear. En principio, el cabezal de reconocimiento óptico realiza un escaneo del objeto en sí, reconociendo un determinado número de puntos por pulgada y a cada uno de estos puntos le asigna un valor en función del número de bits del proceso: 1 bit sería 1 color (negro o blanco), 2 bits serían 4 colores, 8 bits serían 256 colores y así sucesivamente hasta llegar a los 32 bits (color verdadero). A mayor número de bits mayor capacidad para representar el color con más precisión, pero también aumenta de manera sustancial el tamaño del fichero resultante.
El escaneado de una imagen se realiza con el barrido del documento por una fuente luminosa. Una fuente de luz va iluminando, línea por línea, la imagen o documento en cuestión, y la luz reflejada en la imagen es recogida por los elementos que componen el CCD (Charged-Couple Device), dispositivo que convierte la luz recibida en información analógica. Por último, un DAC (Digital-Analog Converter) convierte los datos analógicos en valores digitales. Las zonas claras reflejan más luz que las partes oscuras. La luz reflejada se envía por un juego de espejos y a través de un objetivo hasta un sensor CCD el cual la convierte en señal eléctrica. En color, el mismo procedimiento es repetido tres veces, o bien son los tres chips o captores CCD los que analizan los tres haces luminosos separados previamente por un prisma y filtros rojos, verdes y azules. Los elementos CCD están colocados en una sola fila de forma que a cada elemento le corresponde un píxel de cada una de las filas de puntos que forman la imagen.
Interfaz
Hacia el
PC
Figura 4.6. Diagrama de bloques del scanner
4.4.1. FUNCIONAMIENTO DEL SCANNER
El documento se ilumina por una fuente de luz fluorescente o incandescente. La luz reflejada incide a través de una lente sobre un fotosensor denominado charge coupled device (CCD). EL CCD es una tabla lineal de elementos fotoeléctricos o detectores de luz, cuyo número suele oscilar entre 2.000 y 4.000. Cada elemento proporciona un voltaje proporcional a la cantidad de luz que cae sobre él. Un punto negro del documento absorbe la mayor parte de luz, permitiendo que muy poca se refleje en el CCD, generándose una salida de bajo voltaje. Un punto blanco refleja la mayor parte de luz, dando como resultado una salida de alto voltaje. Los niveles de gris (o colores) causan igualmente voltajes proporcionales generados por los elementos CCD.
Estos niveles de tensión eléctrica, analógicos, deben convertirse en valores digitales. Un conversor analógico-digital (ADC) convierte el voltaje de salida de cada elemento del CCD en una trama de bits adecuada, que representa la intensidad de la luz reflejada. Con cualquier tipo de scanner, una vez convertidos los valores analógicos en digitales, la información resultante puede almacenarse localmente en una RAM para un procesado posterior (frecuentemente en aplicaciones OCR, donde el scanner puede disponer de CPU y Memoria de modo que envía al ordenador ya un fichero ASCII). La mayoría de los scanners, sin embargo, no preprocesan la información obtenida de la digitalización de las imágenes, sino que ésta se envía directamente al ordenador. Así, una vez recibidos los datos de la imagen digitalizada, el ordenador puede procesar la información, mediante software OCR, de edición de gráficos u otras utilidades.
Cada lectura representa una exploración completa de una fila de píxeles, por lo que hay que repetir el proceso hasta completar la lectura del documento o imagen. El CCD puede avanzar hasta la siguiente fila de píxeles por medio de uno de los siguientes métodos: manualmente (scanner manual), por movimiento automático de la página (scanner de rodillos) o por movimiento automático de un espejo reflector (scanner de exploración superior).
4.4.2. PARÁMETROS DE UN SCANNER
RESOLUCIÓN
Es el parámetro más importante de un scanner, es el grado de finura con el que se puede realizar el análisis de la imagen.
La resolución de un scanner es el número de puntos que puede leer para cada pulgada lineal del documento. Las resoluciones se miden en puntos por pulgada ( ppp o dpi). Esta es la resolución óptica o real del scanner. Así, cuando hablamos de un scanner con resolución de "300x600 ppp" nos estamos refiriendo a que en cada línea horizontal de una pulgada de largo (2,54 cm) puede captar 300 puntos individuales, mientras que en vertical llega hasta los 600 puntos; como en este caso, generalmente la resolución horizontal y la vertical no coinciden, siendo mayor (típicamente el doble) la vertical.
Esta resolución óptica viene dada por el CCD y es la más importante, ya que implica los límites físicos de calidad que podemos conseguir con el scanner. Por ello, es un método comercial muy típico comentar sólo el mayor de los dos valores, describiendo como “un scanner de 600 ppp” a un aparato de 300x600 ppp o “un scanner de 1.200 ppp” a un aparato de 600x1.200 ppp. Cuando se habla de una resolución óptica de 600 ppp (puntos por pulgada), estamos indicando que su dispositivo CCD posee 600 elementos. Cuanta mayor sea la resolución, más calidad tendrá el resultado.
Tenemos también la resolución interpolada; consiste en superar los límites que impone la resolución óptica (300x600 ppp, por ejemplo) mediante la estimación matemática de cuáles podrían ser los valores de los puntos que añadimos por software a la imagen. Por ejemplo, si el scanner capta físicamente dos puntos contiguos, uno blanco y otro negro, supondrá que de haber podido captar un punto extra entre ambos sería de algún tono de gris. De esta forma podemos llegar a resoluciones absurdamente altas, de hasta 9.600x9.600 ppp, aunque en realidad no obtenemos más información real que la que proporciona la resolución óptica máxima del aparato.
Por último está la propia resolución de escaneado, aquella que seleccionamos para captar una imagen concreta. Su valor irá desde un cierto mínimo (típicamente unos 75 ppp) hasta el máximo de la resolución interpolada. En este caso el valor es siempre idéntico para la resolución horizontal y la vertical, ya que si no la imagen tendría las dimensiones deformadas.
PROFUNDIDAD DEL COLOR
Este parámetro, expresado en bits, indica el número de tonalidades de color que un píxel puede adoptar; lo normal en la actualidad es un valor de 24 bits por píxeles. Aunque hasta hace poco los scanners de blanco y negro, tonos de grises o 256 colores eran muy populares, lo cierto es que los 24 bits de color se han convertido en un estándar, lógico si se tiene en cuenta que en la actualidad cualquier tarjeta gráfica es capaz de mostrar esta cantidad de colores. Sin embargo, hay scanners capaces de utilizar 30 o incluso 36 bits de color, pero la mayoría lo hacen a nivel interno, para disminuir el intervalo entre una tonalidad y la siguiente; posteriormente, lo que envían al PC son únicamente 24 bits.
Por tanto según el número de bits:
-
de 2 bits, resultaría una imagen en blanco y negro.
-
de 8 bits, se obtendría una imagen de 256 tonos de grises.
-
de 24 bits u 8 bits por componente de color (verde, rojo, azul), la imagen puede llegar a ser de 16'7 millones de colores.
-
de 30 bits, permite sobrepasar los mil millones de tintas.
CONEXIÓN
Un scanner puede tener diferentes formas de conectarse al ordenador, cada una con ventajas e inconvenientes. Una conexión por puerto paralelo facilita la instalación, pero es notoriamente más lenta que otras soluciones. Es el método más común de conexión para scanners domésticos, entendiendo como tales aquellos de resolución intermedia-alta (hasta 600x1.200 ppp, pero más comúnmente de 300x600 ó 400x800 ppp) en los que la velocidad no tiene necesidad de ser muy elevada mientras que el precio es un factor muy importante.
El puerto paralelo, a veces denominado LPT1, es el que utilizan la mayor parte de las impresoras; como generalmente el usuario tiene ya una conectada a su ordenador, el scanner tendrá dos conectores, uno de entrada y otro de salida, de forma que quede conectado en medio del ordenador y la impresora. Como primer problema de este tipo de conexión tenemos el hecho de que arbitrar el uso del puerto paralelo es algo casi imposible, por lo que en general no podremos imprimir y escanear a la vez (aunque para un usuario doméstico esto no debería ser excesivo problema).
La alternativa SCSI es mucho más rápida y fiable, aunque es preciso abrir el equipo, y lidiar con la clásica configuración de la cadena de dispositivos SCSI; otro detalle a tener en cuenta es el tipo de tarjeta SCSI que el scanner puede incluir. La utilidad de la conexión SCSI radica en dos apartados: velocidad y pocos requisitos de microprocesador. Lo primero es fácil de entender: la interfaz SCSI puede transmitir de 5 a 80 MB/s, dependiendo del estándar SCSI en concreto, mientras que el puerto paralelo a duras penas supera 1 MB/s. La otra cualidad de SCSI incide también en la velocidad, aunque de otra forma. No se trata sólo de que se puedan transmitir 10 ó 20 MB/s, sino que además dicha transferencia se realiza sin que el microprocesador realice apenas trabajo; esto permite ir escaneando imágenes mientras realizamos otras tareas, agilizando mucho el trabajo. En un scanner paralelo resulta muy normal que mientras se realiza el escaneado el rendimiento del ordenador baje tanto que no merezca la pena intentar hacer nada hasta que haya finalizado el proceso.
La conexión por el puerto USB es lo último en scanners. En general podríamos decir que los scanners USB se sitúan en un punto intermedio de calidad/precio. La velocidad de transmisión ronda los 1,5 MB/s, algo más que el puerto paralelo pero bastante menos que el SCSI; la facilidad de instalación es casi insuperable, ya que es Plug and Play; todos los ordenadores modernos tienen el USB incorporado; y además dejan el puerto paralelo libre para imprimir o conectar otros dispositivos. Se trata, en fin, de una solución claramente enfocada al usuario doméstico u oficinista.
4.4.3. TIPOS DE SCANNERS
Los scanners de página pueden manejar una página completa en una única exploración. A su vez pueden dividirse en tres categorías: de rodillo, planos y de exploración superior. Los scanners de rodillo funcionan moviendo la hoja a explorar mediante unos rodillos, de forma semejante a un fax de oficina. Los rodillos son la única parte móvil de la unidad: la óptica de exploración es fija. Son los scanners de página funcionalmente más simples, pero tienen el inconveniente de no poder explorar documentos que no posean un formato de hojas sueltas.
Los scanners planos son mecánicamente los más complejos. Su funcionamiento es semejante al de una fotocopiadora: el documento a digitalizar se coloca boca abajo sobre una superficie de cristal. Bajo ésta, una cabeza óptica se desplaza a lo largo del documento para digitalizar la imagen. Así, este diseño permite manejar fácilmente documentos encuadernados o grapados. Muchos scanners planos y de rodillo disponen también de un alimentador de hojas opcional, lo que pude ser muy útil en aplicaciones OCR. Son los más extendidos en la actualidad en el mercado.
Los scanners de exploración superior se parecen a los proyectores para fotografía.
En estas unidades, los documentos se colocan sobre una superficie plana y son digitalizados por medio de una cabeza situada encima de ella. El tamaño de la superficie de digitalización varía según el modelo de scanner. Estos dispositivos permiten, en general, digitalizar también objetos tridimensionales situados sobre la superficie. Debido a que la imagen está más lejos de la cabeza de exploración que en otros tipos de scanner, la calidad de exploración en alta resolución será menor que la ofrecida por las unidades planas o de rodillo.
Un tipo de scanner que ya apenas se utiliza es el scanner de mano, porque el usuario sujeta el scanner con la mano y lo desplaza sobre el documento. Estos scanners eran baratos, pero resultaban algo limitados porque no podían leer documentos con una anchura mayor a 12 o 15 centímetros y no eran válidos para aplicaciones OCR debido al los posibles movimientos de la mano durante el escaneado. Actualmente los scanners más utilizados son los modelos de sobremesa.
Una empresa española ha desarrollado, en colaboración con la Escuela de Óptica de la Universidad Complutense de Madrid, un adaptador universal para el escaneado de diapositivas para scanners de sobremesa. El adaptador refleja la luz generada por el propio escáner y la devuelve a los dispositivos fotosensibles, una vez que el haz luminoso ha atravesado la imagen de la diapositiva o transparencia.

Fig. 4.7. Funcionamiento del adaptador para el escaneado de diapositivas para scanners de sobremesa
4.4.4. RECONOCIMIENTO ÓPTICO DE CARACTERES (OCR)
El OCR (Optical Character Recognizer), es el proceso que analiza los caracteres impresos y determina su forma utilizando patrones de oscuros y claros. Una vez que el scanner o el lector han determinado las formas, éstas se comparan con conjuntos de caracteres definidos para traducirlas a un texto. En algunas ocasiones el reconocimiento óptico de caracteres se realiza con lectores especiales, pero lo más frecuente es utilizar un scanner óptico estándar y un software especializado.
El proceso de OCR se inicia con un escaneo en blanco y negro de la página de la cual queremos extraer el texto. El programa que acompaña al scanner se encarga de convertir las imágenes a caracteres siguiendo unos patrones precargados y comparando el resultado con la tabla de caracteres definidos, ofreciendo un resultado bastante aceptable, salvo que el texto sea prácticamente ilegible, pues hoy en día estos programas han avanzado mucho en este sentido, si bien hemos de realizar revisión visual corrigiendo posibles fallos por parte del software, el cual hasta no hace mucho tiempo dejaba bastante que desear.
4.4.5. ALMACENAMIENTO DE FICHEROS DE IMÁGENES
Existen diversos formatos de ficheros de almacenamiento de imágenes digitalizadas dependiendo del software de utilidad con el que trabajemos. La mayoría de scanners suele aceptar la mayor parte de estos formatos. Otros están limitados a uno o dos formatos, lo cual está bien si estos son los formatos que utiliza su aplicación. El formato de fichero soportado por la mayor parte de los scanners es el TIFF, desarrollado por Aldus y Microsoft. La versión más reciente de la especificación TIFF (5.0) soporta imágenes con escala de grises y en color, además de blanco y negro. Otro formato de fichero soportado por la mayor parte de los scanners es .PCX, utilizado por el popular dibujo de ZSoft, PC Paintbrush. Otros formatos usuales son .EPS (Postcript), .IMG (formato GEM de Digital) o .PFF (utilizado por las impresoras Epson).
Precisamente es el software de utilidad quien determina, al menos en parte, lo que el ordenador hará con las imágenes digitalizadas que recibe. Cualquiera que sea el formato de fichero utilizado, la capacidad de la memoria debe ser alta, no para el proceso de digitalización en sí, sino para la manipulación de las imágenes digitalizadas ( normalmente 2M de RAM o más, sobre todo si hay múltiples escalas de gris). Por ejemplo, explorar un documento de 8.5 x 11 pulgadas a 300 ppp con un simple scanner de dos tonos, da como resultado un fichero de 1M. Si se tratase de una imagen con 256 tonos de gris, el resultado sería de 8M.
Los scanners diseñados estrictamente para OCR a menudo utilizan un programa interno basado en el firmware, y se denominan scanners de texto. Sin embargo, la mayoría de los scanners se basan en el software de terceros para convertir la imagen del documento explorado en un fichero ASCII. Esto ofrece flexibilidad en la elección del paquete de OCR. Incluso los scanners que realizan el OCR internamente pueden sacar provecho del software de otros fabricantes, siempre que generen, por ejemplo, ficheros TIFF.
4.4.6. EL ESTÁNDAR TWAIN
TWAIN (Technology Without An Interesting Name) es un protocolo creado por una serie de fabricantes de hardware y software para que cualquier aplicación pueda adquirir imágenes a partir de un escáner desde dentro del propio programa, de modo que podamos utilizar las aplicaciones instaladas en nuestro equipo, u otras utilidades SHAREWARE o las suministradas con el propio escáner para digitalizar imágenes, modificarlas y guardarlas en el formato deseado.
Se trata de un controlador que puede ser utilizado por cualquier aplicación que cumpla con dicho estándar; su diseño permite que podamos digitalizar una imagen desde la aplicación con la que acabaremos retocándola, evitando pasos intermedios. Por tanto es recomendable que el driver Twain del scanner sea lo más potente y flexible posible; no basta con que nos permita elegir resolución, tamaño y tipo de la imagen o documento, sino que también posea controles para ajustar los parámetros que influyen en el proceso de digitalización: niveles de contraste, colores, etc.
-
Todo scanner incluye el driver TWAINB específico para cada marca, e incluso para cada modelo, pero que cumple las especificaciones necesarias parta que sea reconocido por cualquier aplicación compatible TWAIN. Hoy en día es impensable un driver propietario, como ocurría hace algunos años. Sin embargo, como el driver está diseñado para cada marca y modelo, éste incluye más o menos opciones de exploración que nos permiten ajustar el proceso de digitalización.
Algunos escáneres de reconocidas marcas ofrecen una alta resolución óptica y una lente de buena calidad, pero se ven muy limitados por el driver TWAIN, al ajustar éste automáticamente la resolución de la digitalización a la resolución de la impresora y al digitalizar siempre en modo color, con la consiguiente pérdida de tiempo durante la digitalización y posteriormente a tener que transformar la imagen a grises o blanco y negro mediante software.
5. PERIFÉRICOS DE TRANSMISIÓN
Permiten la comunicación entre ordenadores. Si éstos están próximos, la conexión de los mismos se puede realizar en banda base, mediante un bus paralelo. Si la distancia es tal que la transmisión paralela no ofrece garantías, se utilizará entonces la transmisión en serie, mediante una portadora sinusoidal modulada por la información digital a enviar, entendiendo por modulación el proceso por el cual un tren de datos genera una señal analógica compatible con la línea de transmisión, y por demodulación el proceso inverso. Este tipo de transmisión requiere unos dispositivos denominados módems, o moduladores-demoduladores, puesto que éstos que realizan dichas operaciones, enviando la información sobre el soporte correspondiente (cable coaxial, línea telefónica, fibra óptica, etc).
Las posibilidades a la hora de influir en la calidad de la comunicación de nuestro ordenador con el resto del mundo, por desgracia, son mínimas en comparación con las de otros factores. La líneas telefónicas marcan el tope, si no tenemos acceso a cable. En general, los dispositivos que hacen uso de las líneas de transmisión (ETD) tienen capacidades limitadas de transmisión de datos. La distancia a la que pueden transmitir es pequeña y no suelen conectarse directamente al medio. La solución más común es que el ETD use el sistema de transmisión a través de un equipo llamado ETCD (por ejemplo un módem).
5.1. MÓDEM
Un módem es un dispositivo que convierte las señales digitales del ordenador en señales analógica que pueden transmitirse a través del canal telefónico. Así pues, su trabajo es modular/demodular (mod/dem).
Un módem transforma las señales digitales del ordenador en señal analógica y viceversa, con lo que permite al ordenador transmitir y recibir información por la línea telefónica y es utilizado para la comunicación de ordenadores a través de líneas analógicas de transmisión de datos. El módem convierte las señales digitales del emisor en otras analógicas susceptibles de ser enviadas por teléfono. Cuando la señal llega a su destino, otro módem se encarga de reconstruir la señal digital primitiva, de cuyo proceso se encarga el ordenador receptor. En el caso de que ambos puedan estar transmitiendo datos simultáneamente, se dice que operan en modo full-duplex; si sólo puede transmitir uno de ellos, el modo de operación se denomina half-duplex.
Para convertir una señal digital en otra analógica, el módem genera una onda portadora y la modula en función de la señal digital. El tipo de modulación depende de la aplicación y de la velocidad de transmisión del módem. Un módem de alta velocidad, por ejemplo, utiliza una combinación de modulación en amplitud y de modulación en fase, en la que la fase de la portadora se varía para codificar la información digital. El proceso de recepción de la señal analógica y su reconversión en digital se denomina demodulación. Los utilizados en la actualidad en los ordenadores personales transmiten la información hasta 56 kbits por segundo. Pueden incluir funciones de fax y de contestador automático de voz.
La velocidad de un módem se mide en baudios (bits por segundo), y sabiendo que un byte se compone de 8 bits un módem de 33.600 baudios transmitirá (en el mejor de los casos) un máximo de 4.200 bytes por segundo y necesitaría unos seis minutos para transmitir el contenido de un disquete de 1,44 Mb.
La línea telefónica sólo es capaz de transmitir a 9.600 baudios, ya que fue concebida para la transmisión de la voz humana en comunicaciones de doble sentido. Esta velocidad de transmisión funcionó más o menos bien mientras las conexiones eran a servicios de hipertexto como las BBS, sistemas de comunicación que requerían escasa transferencia de información, tanto por parte del servidor como por parte del usuario. El problema surgió cuando apareció Internet, con sus cada vez más detallados entornos gráficos, lo que requería romper esa barrera de 9.600 bps. Evidentemente, se podía romper con conexiones por cable óptico o por satélite, pero eso no está al alcance del usuario corriente.
Había que conseguir que un módem normal pudiese transferir a mayor velocidad que la permitida por la línea telefónica convencional y la respuesta estaba en la compresión. Un módem actual, además de convertir la señal analógica en digital y viceversa, se encarga de comprimir y descomprimir los datos que envía o recibe. La compresión de datos observa bloques repetitivos de datos y los envía al módem remoto en forma de palabras codificadas. Cuando el otro módem recibe el paquete lo decodifica y forma el bloque de datos original. Estas normas de compresión vienen dadas por la Unión Internacional de Comunicaciones (ITU), cuyas últimas aprobaciones vienen dadas por el estándar V34, que permite velocidades de transmisión a 31.200 y 33.600 bps.
El último paso de esta escalada de velocidad es la guerra desatada entre las marcas Rockwell y US Robotics cada una con su propio sistema (56 Kflex y X2) capaz de alcanzar los 56.600 bps. Este nuevo sistema consiste, básicamente, en mantener la señal digital desde que sale del servidor hasta que llega a la centralita a la que se encuentra conectada nuestra línea. Como casi todas las centralitas son hoy en día digitales, los cambios que habrá que hacer de digital a analógico y viceversa serán menor, acelerando así la velocidad de transmisión. Afortunadamente, acaba de salir la norma V90, que es compatible con las dos citadas anteriormente.

Los siguientes pasos explican cómo comunica el módem con otros módems.
El software de comunicaciones en el ordenador, envía una señal de Terminal de Datos Listo (DTR) al módem. Esta señal indica al módem que el ordenador está lista para transmitir datos. El módem envía una señal Conjunto de Datos Listo (DSR) a el ordenador para indicar que el módem está listo para recibir instrucciones o datos. La presencia de estos dos señales inicia el proceso de comunicación.
El software de comunicación empieza a enviar comandos al módem. El software y el módem comunican usando el conjunto de comandos AT, que fue desarrollado por módems Hayes. Después de recibir cada comando, el módem envía una respuesta al software.
IMPORTANTE: Porque estos son los únicos comandos que el módem reconoce, siempre debe verificar que cualquier software de comunicaciones del que se disponga tenga una etiqueta indicando que es “Compatible con Hayes”.
Cuando el software de comunicaciones está listo para la comunicación del módem con otro módem, envía un comando que indica que el módem debe conectarse. Esto señala que el módem debe hacer una conexión con la línea telefónica. Entonces, el software indica al módem que marque un número telefónico.
Cuando el módem receptor contesta la llamada, su módem envía un tono para identificarse como un módem (en lugar de una llamada de voz normal); el módem remoto envía un tono de respuesta de un tono más agudo. Es posible que se pueda escuchar estos tonos a través de los altavoces del ordenador.
El módem envía la señal Detectar Portador (CD) al ordenador. Esto indica al software de comunicaciones que el módem está recibiendo una señal de portador, un tono constante que puede modularse para transmitir datos.
En un proceso denominado establecimiento de comunicaciones, el módem negocia con el módem remoto para establecer los protocolos que usarán para comunicar.
Cuando el software de comunicaciones desea enviar datos, envía una señal Solicitud de Enviar (RTS) al módem. Cuando el módem está disponible (o sea, cuando no está ocupado enviando o recibiendo datos), envía la señal Libre para Enviar (CTS) al ordenador.
El módem modula los datos digitales que el ordenador desea enviar y los transmite a través de la línea telefónica. El módem remoto recibe la señal análoga, la demodula y la envía al ordenador remoto. Ambos módems pueden enviar información al mismo tiempo a través de la línea telefónica.
Cuando usted indica al software de comunicaciones que debe terminar la llamada, el software envía un comando al módem para romper la conexión. El módem desconecta la llamada, luego deja de enviar la señal Detectar Portador (CD); esto indica al ordenador que la sesión de comunicaciones ha terminado.
5.1.1. TIPOS DE MÓDEMS
Existen dos formas de clasificar los módems hoy en día:
1. Según la forma de transmisión:
Los módems analógicos actuales (hasta 56K) llegan a utilizar la anchura máxima de las líneas telefónicas estándar, y según las condiciones de la línea puede que incluso no se llegue a alcanzar la velocidad máxima de transmisión y recepción del módem.
Los módems digitales (hasta 64K) necesitan una línea telefónica RDSI (Red Digital de Servicios Integrados), totalmente digital, que nos permite dos canales de 64KB para voz y datos, llegando así a una transferencia máxima de 128K.
Mientras que las llamadas por ambos tipos de líneas, analógica (la de todas las casas) y digital (RDSI), cuestan exactamente lo mismo, el coste de instalación y la cota mensual son ciertamente muy caras en el caso de la línea RDSI, siendo realmente las empresas a quienes les interesa este tipo de línea por la necesidad de transmitir o recibir gran cantidad de datos y por la posibilidad de utilizar una sola conexión RDSI y un solo módem RDSI que permite la conexión a Internet de varios usuarios simultáneamente desde una Red Local a través de un Servidor.
2. Según la forma de conexión:
El módem interno es una tarjeta que se inserta en uno de las ranuras ISA de expansión de nuestro ordenador y presenta las siguientes ventajas:
-
Son más baratos que los externos, por no tener caja ni fuente de alimentación externa.
-
Tienen su propia UART, por lo que no debemos preocuparnos por el tipo de ésta.
-
No consumen espacio sobre el escritorio y no existe la posibilidad de que se caigan y se estropeen.
Pero también existen desventajas:
-
Ocupan una ranura de expansión ISA, que puede que no tengamos libre debido a la escasez de éstas en las placas bases modernas (3 o incluso 2 en algunas placas para Pentium II).
-
A veces son muy difíciles de configurar por conflictos con las IRQ.
-
No sabemos el estado de nuestras comunicaciones.
-
En caso de tormenta pueden recibir una descarga eléctrica a través de la línea telefónica que puede afectarles a ellos mismos o a algún otro componente del equipo. Al ser internos, no se pueden apagar o desconectar.
El módem externo es una caja dentro de la cual encontramos los mismos circuitos que en un módem interno y se conecta a unos de los puertos serie (COM) de nuestro equipo. Sus ventajas son:
-
No consumen una ranura ISA, que podemos necesitar para otros componentes (tarjeta de sonido, tarjeta de red, tarjeta capturadora de vídeo, scanner, etc.).
-
No plantean problemas de configuración, pues utilizan las IRQ del puerto serie correspondiente.
-
Podemos usarlo con varios equipos diferentes, incluso portátiles.
-
Disponen de un panel frontal con luces, o incluso una pantalla digital, donde podemos ver información sobre la conexión (estado, corrección de errores, incluso sobre la velocidad de transmisión).
-
Se pueden apagar independientemente, especialmente útil en caso de tormenta o cuando una conexión está bloqueada.
Pero obviamente también tienen sus desventajas:
-
Necesitamos una UART 16550 para que nuestro puerto serie no provoque errores o embudos en la conexión.
-
Pueden hacer que nuestra mesa de trabajo sea una maraña de cables.
-
La mayoría tienen una fuente de alimentación externa, que es un estorbo más.
-
Necesitamos un nuevo enchufe para conectarlo a la corriente eléctrica (otro más, además de equipo, monitor, altavoces, scanner, etc.)
Módems Especiales : Existen el mercado dos tipos especiales de módem, aparte de los módems analógicos estándar y los módems digitales (RDSI), que son los módem RPI y los WINMÓDEM.
Los módems RPI, normalmente de 14,4K aunque los hay de 28,8K, se caracterizan por utilizar un chipset especial de ROCKWELL que no incluye el protocolo de compresión de datos y corrección de errores (habitual en todos los chipsets de 28,8K, 33,6K y 56K), sino que hacen estas funciones mediante software, instalando un driver, abaratando así sensiblemente el coste del módem.
Los WINMODEM, un concepto introducido por USRobotics, se caracterizan por funcionar solamente en WINDOWS 3.x/95 (no en MS-DOS, LINUX, WINDOWS NT, OSR/2) y utilizar la potencia del procesador para realizar ciertas funciones propias del chipset interno del módem. Para utilizarlos, es recomendable que el procesador del equipo sea al menos un Pentium 166MHz y tener al menos 16MB de RAM, pero debemos recordar que si estamos utilizando varios programas durante la conexión, el rendimiento del módem desciende. La ventaja de este tipo de módem es su actualización por software a nuevos protocolos y su muy bajo precio. Si buscamos un módem económico, para un uso ocasional, no utilizamos programas de comunicaciones para DOS, nuestro sistema operativo es WINDOWS y tenemos un procesador potente y bastante memoria RAM, ésta es una opción muy válida.
5.1.2. FUNCIONALIDADES DE UN MÓDEM
Actualmente el módem está convirtiéndose en un complemento indispensable para cualquier usuario de informática, no sólo para aquellos que quieran conectarse a Internet, sino también para las empresas, y particulares, que necesiten hacer envíos de cantidades importantes de datos a destinos más o menos lejanos de su lugar de residencia, reduciendo drásticamente el gasto telefónico, de modo que el correo electrónico (E-Mail) está desbancando paulatinamente el uso del FAX tradicional. Debemos recordar que, aunque los MÓDEM actuales pueden hacer funciones de FAX, todavía aún no está resuelto el tema de la verificación de autenticidad de los documentos enviados por FAX.
Otros usos importantes del módem, generalmente descuidados tanto por particulares como por empresas, es la posibilidad de realizar videoconferencia a precio de llamada local (lo cual está siendo un quebradero de cabeza para las empresas telefónicas norteamericanas) o conectarse a un grupo de news (público o de pago) para mantenerse informado de los temas que nos interesen de manera automática, recibiendo en nuestro ordenador los mensajes de manera automatizada.
Otros aspectos más lúdicos o de entretenimiento son los juegos en línea (ON-LINE) y las charlas vía Internet (chat IRC).
6. BUSES DE CONEXIÓN
El BUS es el canal de comunicación de los periféricos de nuestro ordenador con la CPU. Es muy importante, pues TODOS los periféricos van conectados al BUS. La velocidad máxima del BUS marcará la pauta para nuestros periféricos.
6.1. HISTORIA DE LOS BUSES
ISA: Usado en los primeros PC. Es de ocho bits por que usa ocho líneas para comunicarse con tarjeta de placas. También hay de 16 bits. Sus principales características eran la baja capacidad y amplia difusión.
NCA Es un ISD extendido de 32 bits. Es compatible con el ISA. No se usa para orden de alto nivel avanzado y más avanzado.
EISD Es un ISD extendido de 32 y compatibles con ISD. No se usaba para ordenes de alto nivel.
Bases locales:
Obtienen alto rendimiento entre la placa y las ranuras de expansión. Trabaja a 33 Mhz.
VL-BUS: Instalado en los 468 de gama alta. No había acceso directo a RDM, y tenía que intervenir o la CPU o un canal DMD y esto tardaba mucho.
-
PCI Evita el problema anterior. Sus principales características las veremos en el siguiente apartado.
-
AGP: Específico para controladores de vídeo. Bus de alto rendimiento de 32 bits y velocidad de 66 Mhz, su capacidad es muy superior.
Buses normalizados de periféricos
SCSI: (visto en el apartado de discos duros) Estándar universal para la conversión de todo tipo de periféricos. Utilizado para dispositivos de almacenamiento. Sus características son:
-
Sencillez
-
Los dispositivos conectados son específicos para el SCSI, es decir, son de tipo SCSI, esto conlleva a que todos los dispositivos llevan conector de “E” y de “S” para el SCSI.
-
Contienen altas prestaciones.
-
Alto coste de adquisición
SCSI 1: Ocho bits permite conectar hasta 8 dispositivos. Realmente son sólo siente dispositivos, ya que uno lo ocupa la controladora. La transferencia es de 3,3. Mb/seg. Hasta 5 Mb/seg.
SCSI 2: Se mejora la velocidad. Hay cuatro tipos de SCSI .
Normal 8 bitss 5 Mb/seg
Fast 8 bits 10 Mb/seg
Wide 16 bits 10 Mb/seg
Fast-Wide 16 bits 20 Mb/seg
Ultra SCSI: Salió en 1996, aumenta las prestaciones del SCSI. Compatible con Fast-SCSI 2 y con Fast/Wide-SCSI 2. Para buses de 8 bits. Alcanza los 20 Mb/seg, y para buswes de 16 bits llega hasta 40 Mb/seg.
SCSI 3: Es otro conjunto de estándares, muy especializado. Por ejemplo, uno de esos conjuntos está orientado a serie en fibra óptica, y alcanza una gran velocidad en este campo. SCSI 3 ya no es compatible con los otros, a favor de la velocidad.
IEEE 1394: Tiene los mismos objetivos (WIRE-FIRE)
USB: (Universal Serial Bus). La información se transmite en serie. Su objetivo es superar los inconvenientes de la conexión entre periféricos y ordenador.
6.2. PCI (Peripheral Component Interconnect)
El bus PCI emplea un bus de Direcciones/Datos multiplexado de 32 bits, y las modernas versiones establecían la opción de incorporar un bus de 64 bits de extensión. Este bus es maestro multitarea y se utiliza como central aleatoria de transmisión. El bus PCI puede seleccionar la transferencia con cualquiera de los esclavos que necesite. (Mirar la figura 6.1. del apartado dedicado a puerto AGP).
Este bus regulariza en el PC la velocidad de transferencia de los periféricos que estén conectados a él a una velocidad de 33 Mhz, aunque la transferencia de datos teórica sería de 132 MB/s (33 MHz x 4 Bytes). Para el bus ampliado de 64 bits tendría una velocidad a 66 MHz lo que supondría una transferencia de datos de 528 MB/s (66 MHz x 8 Bytes).
Por ejemplo, en una placa base con bus PCI y una tarjeta gráfica PCI el procesador se comunica con la tarjeta gráfica, para enviar una serie de datos que ésta debe procesar para su representación en pantalla, a una velocidad de 33 MHz, la velocidad del bus PCI. Esto supone una importante limitación en cuanto a transferencia de datos, pues se pueden alcanzar picos máximos de hasta 133 MB/s.
Sus principales características son:
-
Bus de 32 bit de datos y direcciones.
-
Velocidad de 33 Mhz.
-
Capacidad de transferir datos de 133 MB/s.
-
Soporta el bus masterin´ (Bus master RMD)
-
Permite realizar casos concurrentes de escritura.
-
Reparte de forma inteligente la capacidad. Otorga más capacidad al dispositivo que más lo necesite.
-
Permite realizar casos concurrentes de escritura.
-
Soporta máximo 3 ó 4 slots por cada bus PCI
-
Puede coexistir con buses de otro tipo.
-
Preparado para multitud de plataformas. No sólo para PC.
-
Incorpora facilidades ( Plug & Play)
-
El coste de este tipo de buses es muy bajo.
El PCI es un bus de configuración automática, pertenece a la tecnología Plug and Play y tiene el inconveniente de no poder dotar al PC de la posibilidad de conectar periféricos externos de una manera eficiente y sencilla, además de proporcionar unas posibilidades de expansión un tanto reducidas, ya que tan sólo podemos encontrar un máximo de cinco ranuras de este tipo de bus. Encontrar más sería excepcional, por lo que hay que recurrir al puerto serie y el paralelo para estas tareas, pero las limitaciones de velocidad y la tecnología un tanto antigua hacían necesaria la aparición de un bus que fuese capaz de conectar varios dispositivos de forma simultánea y que su configuración se realizase automáticamente, así se justifica la aparición del bus USB que estudiaremos más adelante.
6.3. AGP (Accelerated Graphics Port)
El bus, o mejor llamado puerto, AGP no es una mejora, ni una sustitución del bus PCI, sino que es una forma de conseguir más posibilidades para la conexión, por medio de la unión “punto a punto”(sin bus), a la placa madre de distintos dispositivos. Tiene también una anchura de 32 bits como el bus PCI, y la comunicación se produce a 66 MHz, pudiendo alcanzar transferencias de hasta 266 MB/s, pero con el bus de 100 MHz por parte de INTEL, con el chipset 440BX, AMD y CYRIX, la tasa de transferencia puede llegar a alcanzar hasta 800 MB/s.
El PCI ya se ha quedado anticuado y hoy en día es muy difícil encontrar una tarjeta gráfica con este tipo de bus. Así que si tu placa base no tiene AGP, es difícil que puedas actualizarte a una tarjeta 3D moderna.
Las tarjetas AGP, usadas en ordenadores Pentium II/III son capaces de usar la memoria RAM como memoria de texturas, es decir, no sólo la memoria que viene incluida en la tarjeta gráfica. Por ello, los pocos juegos que hay actualmente para AGP, son capaces de tener texturas animadas o de alta resolución moviéndose a una velocidad asombrosa. Además, el AGP ofrece un ancho de banda superior al PCI: si el PCI va a 66 MHz, el AGP va a 133 MHz, con unas variantes: el AGP 2x a 266 MHz y el AGP 4x a 533 MHz.
Hay que decir que no todas las tarjetas AGP son “AGP verdaderas”, es decir, que utilizan la memoria RAM como memoria de texturas. Las AGP no verdaderas son todas aquellas que tienen tanto versión PCI como AGP, o bien que la versión AGP ha evolucionado de la PCI (puede haber que tenga versión PCI y luego una versión AGP verdadera). Y las AGP verdaderas son aquellas que han sido diseñadas para tal fin, y que sólo existen en versión AGP. Se pueden diferenciar las AGP 4x y las AGP 2x, las primeras llevan 2 hendiduras en los contactos de la zona de conexión y las segundas llevan sólo una.
Su principal de funcionamiento junto al del bus PCI lo podemos ver en el siguiente diagrama de bloques:
Figura 6.1. Integración AGP en una Placa Madre
Las placas base más actuales como las de K7 (con chipset KX133) o las de Pentium III con chipset i820 soportan AGP 4X, llegando a una velocidad de 266 MHz, pudiendo almacenar en la memoria del sistema texturas enormes sin apenas notarlo en la suavidad del juego. El método de Fast Writes permite que los datos pasen directamente del procesador al chip sin tener que pasar por la memoria del sistema. Actualmente, la memoria del sistema no es el cuello de botella, porque puede procesar los 360 MB/s (180 de ida y 180 de vuelta) y aún sobra ancho de banda.
Por otra parte, la velocidad del AGP depende por entero de la velocidad de bus de vuestro ordenador, puesto que se calcula usando un multiplicador. Si el sistema va a 100 MHz, el multiplicador será de 2/3, pero si va a 133, será de 1/2. Si el resultado es mayor de 66 MHz es posible que se aprecien distorsiones en la imagen.
El problema del puerto AGPes que debido su diseño, sólo podemos tener uno en nuestra placa base, por lo que sólo podremos tener una tarjeta AGP, que siempre será la tarjeta gráfica.
6.4. USB (Universal Serial Bus)
Ha habido intentos de todos los tipos para ampliar las posibilidades de expansión para los PC, desde aumentar el número de puertos serie y paralelo, hasta buses específicos como SCSI. El bus SCSI parecía ser la solución ideal, por velocidad y capacidad e transferencia y por el número de dispositivos conectables a la controladora SCSI, hasta 7 dispositivos en cadena y hasta 15 con Ultra Wide SCSI-2, pero su alto coste, junto con sus problemas de configuración, dieron lugar a la aparición del USB y el FIREWIRE (IEEE 1394).
USB emplea una topología de estrellas apiladas que permite el funcionamiento simultáneo de 127 dispositivos a la vez . En la raíz o vértice de las capas, está el controlador anfitrión o host que controla todo el tráfico que circula por el bus. Esta topología permite a muchos dispositivos conectarse a un único bus lógico sin que los dispositivos que se encuentran más abajo en la pirámide sufran retardo. A diferencia de otras arquitecturas, USB no es un bus de almacenamiento y envío, de forma que no se produce retardo en el envío de un paquete de datos hacia capas inferiores.
El sistema de bus serie universal USB consta de tres componentes:
- Controlador: Reside dentro del PC y es responsable de las comunicaciones entre los periféricos USB y la CPU. Es también responsable de la admisión de los periféricos dentro del bus, tanto si se detecta una conexión como una desconexión. Para cada periférico añadido, el controlador determina su tipo y le asigna una dirección lógica para utilizarla siempre en las comunicaciones con el mismo. Si se producen errores durante la conexión, el controlador lo comunica a la CPU, que, a su vez, lo transmite al usuario. Una vez se ha producido la conexión correctamente, el controlador asigna al periférico los recursos del sistema que éste precise para su funcionamiento. El controlador también es responsable del control de flujo de datos entre el periférico y la CPU.
- Concentradores o HUBs: Son distribuidores inteligentes de datos y alimentación, y hacen posible la conexión a un único puerto USB de 127 dispositivos. De una forma selectiva reparten datos y alimentación hacia sus puertas descendentes y permiten la comunicación hacia su puerta de retorno o ascendente. Un HUB de 4 puertos, por ejemplo, acepta datos del PC para un periférico por su puerta de retorno o ascendente y los distribuye a las 4 puertas descendentes si fuera necesario.
Los concentradores también permiten las comunicaciones desde el periférico hacia el PC, aceptando datos en las 4 puertas descendentes y enviándolos hacia el PC por la puerta de retorno. Además del controlador, el PC también contiene el concentrador raíz. Este es el primer concentrador de toda la cadena que permite a los datos y a la energía pasar a uno o dos conectivos USB del PC, y de allí a los 127 periféricos que, como máximo, puede soportar el sistema. Esto es posible añadiendo concentradores adicionales. Por ejemplo, si el PC tiene una única puerta USB y a ella le conectamos un HUB o concentrador de 4 puertas, el PC se queda sin más puertas disponibles. Sin embargo, el HUB de 4 puertas permite realizar 4 conexiones descendentes. Conectando otro HUB de 4 puertas a una de las 4 puertas del primero, habremos creado un total de 7 puertas a partir de una puerta del PC. De esta forma, es decir, añadiendo concentradores, el PC puede soportar hasta 127 periféricos USB.
La mayoría de los concentradores se encontrarán incorporados en los periféricos. Por ejemplo, un monitor USB puede contener un concentrador de 7 puertas incluido dentro de su chasis. El monitor utilizará una de ellas para sus datos y control y le quedarán 6 para conectar allí otros periféricos.
- Periféricos: USB soporta periféricos de baja y media velocidad. Empleando dos velocidades para la transmisión de datos de 1. 5 y 12 Mbps se consigue una utilización más eficiente de sus recursos. Los periféricos de baja velocidad tales como teclados, ratones, joysticks, y otros periféricos para juegos, no requieren 12 Mbps. Empleando para ellos 1,5 Mbps, se puede dedicar más recursos del sistema a periféricos tales como monitores, impresoras, módems, scanners, equipos de audio . . ., que precisan de velocidades más altas para transmitir mayor volumen de datos o datos cuya dependencia temporal es más estricta.
Tan pronto como conectamos un dispositivo USB (sin tener que apagar el equipo) el controlador USB detecta una diferencia de voltaje en el puerto USB e intenta identificar el dispositivo nuevo y sus características. Si no es capaz de identificarlo, nos pide que introduzcamos el disco de instalación, y una vez instalado el driver ya podemos empezar a funcionar con el nuevo dispositivo, normalmente sin reiniciar el equipo.
El puerto USB utiliza una única IRQ para todos los dispositivos conectados (hasta 127), pero para identificarlos, a cada uno le asigna una ID (parecida a la del bus SCSI) única a cada uno, pero no hay necesidad de configurar, de hecho el ordenador no asigna ninguna, ni IRQs ni DMAs ni direcciones de memoria, pues todos los dispositivos comparten los mismos recursos del controlador USB de la placa base.
Cuando se desconecta un dispositivo USB, de nuevo sin necesidad de reiniciar el equipo, el controlador USB detecta de nuevo una diferencia de voltaje, hace una búsqueda de dispositivos para averiguar cuál ha sido conectado e inmediatamente descarga los drivers del dispositivo para así ahorrar memoria del sistema.
Ventajas del puerto USB y los dispositivos USB
1. PLUG'N'PLAY
El puerto USB, y por tanto todos los dispositivos con conexión USB, son verdaderamente Plug'n'play, es decir, el dispositivo es detectado automáticamente al conectarlo al equipo y el sistema operativo instala el driver adecuado o nos pide el disco de instalación. Aún más, no es necesario apagar, ni siquiera reiniciar, el equipo para conectar o desconectar los dispositivos, cargándose y descargándose automáticamente de memoria el driver correspondiente.
2. CONEXIÓN EN CALIENTE
No es necesario apagar, ni siquiera reiniciar, el equipo para instalar o desinstalar un dispositivo USB. Algo especialmente interesante si olvidamos conectar un dispositivo al encender el equipo o si simplemente no tenemos suficientes conectores para todos los dispositivos USB. Además, esto permite conservar recursos de memoria, pues cada dispositivo conectado requiere un driver residente, que de este modo sólo se carga cuando se necesita y se descarga al dejar de necesitarlo.
3. RECURSOS DEL DISPOSITIVO
Quizá una de las mayores ventajas para los equipos actuales es el hecho de que el puerto USB solamente necesita una IRQ y una dirección de memoria y todos los dispositivos conectados a él solamente necesitan una ID para su identificación (como en el bus SCSI) dentro de la cadena de 127 dispositivos, sin necesitar más recursos. Si tenemos en cuenta que los puertos estándar (dos serie, un paralelo, un PS/2 para ratón, uno para teclado, un puerto para joystick) consumen 5 IRQs, alguna DMA y múltiples direcciones de memoria, al utilizar dispositivos USB nos estamos ahorrando valiosos recursos del sistema.
4. SIMPLICIDAD
El manejo de los dispositivos USB se hace por software, concretamente por el propio sistema operativo, por lo que los dispositivos USB son más fáciles de fabricar y por tanto más baratos. Además, USB es una tecnología abierta por la que no hay que pagar derechos, lo que siempre abarata los costes de fabricación.
5. DISPOSITIVOS
Podemos conectar hasta un total de 127 dispositivos en cadena o utilizando HUBs (concentradores de puertos USB), frente a solamente 1 por cada puerto serie y uno por cada puerto paralelo (siempre nos queda la opción de utilizar conmutadores, pero no todos pueden funcionar a la vez) y cada dispositivo puede tener un cable de hasta 5 metros de longitud, frente a 1 metro para el puerto serie y 4 metros para el puerto paralelo. Además, conectándolos en cadena, el último dispositivo puede estar a 635 metros del ordenador.
Actualmente se encuentran en el mercado monitores, teclados, ratones, cámaras, joysticks, módems, scanners, impresoras e incluso altavoces (sin necesidad de tarjeta de sonido) con conexión USB, pero el número de dispositivos aumentará y podremos ver también con conexión USB dispositivos de almacenamiento (IOMEGA ha anunciado una versión USB de su unidad ZIP, y lo mismo ha hecho IMATION con su unidad LS-120, y otros les seguirán), CD-ROMs, discos duros externos, etc.
Lo que no debemos olvidar a la hora de comprar un dispositivo USB es que cada dispositivo puede funcionar como HUB, es decir, incluir uno o más conectores USB, de modo que podamos conectar un dispositivo a otro en cadena, y así, por ejemplo un teclado, puede incluir dos conectores USB, uno para el ratón y otro para el joystick; de igual modo el monitor puede servir de HUB y permitir conectar a él por ejemplo los altavoces, o el teclado, al cual a su vez se conectan el ratón y el joystick, etc., etc.
Hay que tener en cuenta que muchos dispositivos USB actuales no son más que conversiones de dispositivos existentes por lo que muchos aún no implementan su uso como HUBs, por lo que quizás valga la pena esperar un poco a que haya más dispositivos disponibles.
6. VELOCIDAD
El puerto serie es capaz de transmitir hasta 112,5KB/s y el puerto paralelo entre 600KB/s y 1'5MB/s, pero el puerto USB es capaz de llegar a alcanzar entre 1'5MB/s y 12MB/s, por lo que es la conexión ideal para módems de 56K, scanners (como alternativa de similar coste a los de puerto paralelo), CD-ROMs externos, dispositivos de copia de seguridad externos, etc.
Sin embargo, para dispositivos de almacenamiento (especialmente discos duros externos), conexiones de red, cámaras, etc. quizás sea interesante esperar un poco a que este año 199 se estandarice el bus FIREWIRE (IEEE 1394), que promete transferencias entre 100MB/s y 400MB/s, que permite conectar hasta 63 dispositivos y un cable de 4'5 metros por dispositivo, permitiendo al igual que el USB la conexión en caliente. El puerto USB no tiene los días contados (de hecho no hay en el mercado placas con este conector pues los chipsets actuales no lo soportan), sino que se destinará a cierto tipo de dispositivos que requieren una transferencia de datos baja o media (teclados, ratones, joysticks, etc.) mientras que el bus FIREWIRE se destinará a dispositivos que requieren una alta transferencia (scanners, impresoras, discos duros, DVD, etc.).
Tan pronto como estén disponibles más dispositivos FIREWIRE, publicaremos un informe sobre este nuevo bus.
Uno de los problemas del puerto USB es que suministra solamente 500 miliamperios de electricidad para los dispositivos conectados, que aunque es suficiente potencia para la mayoría de los dispositivos que se conectan a este puerto, resulta escaso cuando conectamos varios dispositivos sin fuente de alimentación propia. Lo que sí podemos hacer es comprar un HUB USB con toma de alimentación eléctrica, para proporcionar la potencia necesaria a aquellos dispositivos que lo requieran (especialmente scanners e impresoras).

Interfaz del Bus


AGP
Interfaz de la Memoria Local
RAM
DAC
TV Out
2D Pipelines



Discos de memoria (H.D.).
L
E
C
T
O
R
Lector
Un dato importante es que en los CD-ROM con información muy repartida:
24X trans. = 100 mseg
12X trans. = 20 mseg.
El primero es del tipo de videos y el segundo es más rápido.
Tiempo de medición.
Texture-Buffer

Para marcar cualquier carácter lo que se haría sería activar cada uno de los puntos necesarios.
El cabezal, en negro, imprime seleccionando los puntos precisos para cada carácter. La barra, en gris, hace que el folio vaya subiendo.
En este tipo de impresoras la impresión es por tinta que viene en forma de cinta (gris). El carácter (negro) empuja con fuerza sobre la cinta y esta deja impreso el carácter sobre la hoja (blanco) que a su vez golpea sobre el rodillo.
Agujas inyectoras
Calentador de tinta
Tanque de tinta.
La tinta queda impresa en el papel calentado la tinta en polvo y sellándola contra el papel
Tanque de tinta
Calentador
Rodillo
Papel
Frame-Buffer
Buffer Z
Tarjeta AGP
AGP
RAM
de
Vídeo
Generador
Gráfico
ROM-BIOS
Adaptador
gráfico
Interfaz de Control
Código CD-ROM
Microprocesador
Interfaz de Control
Interfaz
3.5”
Sincronización de datos
Programación
Controlador
De
Memoria
ROM-BIOS
Interfaz
HD
Rayo de muestreo
Vídeo RAM
CRTC
Generador de Gráficos
ROM gráfica
Decodificador de atributos
Generador de señal
Registro
de escritura
Señal digital
Señal analógica
Dirección de muestreo
lámpara
Cristal superior de presentación
Lente
CCD-Scanner
Unidad de proceso del dibujo
3D Pipeline
Motor
del
Video
2D/3D Pipeline del Preprocesador
PCI Interfaz
2X AGP Interfaz
Codificador de TV
I2C
Puerto de
Video
Puerto Host
Display
Memoria Local
Chip Gráfico
Bus PCI
Dispositivo PCI
Dispositivo PCI
Puente PCI-ISA
Textura de Datos
Memoria del PC
Salida de Audio
Entrada de Audio
Conectores
Bus de la interfaz
Conversor Analógico / Digital
Digital /Analógico
Interfaz
MIDI
Chip Sintetizador
PCI BUS
Puente PCI
Puente AGP
Chipset
CPU
Bus ISA
Interfaz IDE
2 Discos Duros o CD-ROM
(Esclavo)
Disco Duro (Maestro)
Controlador IDE Standard
Interfaz IDE
secundario
CD-ROM
(Maestro)
Interfaz IDE
primario
Disco Duro
(Esclavo)
Disco Duro (Maestro)
Controlador IDE extendido
Scanner
Unidades de cinta magnética
CD-ROM
Disco Duro
y discos removibles
Capa: Interfaz avanzado de programación SCSI (ASPI)
Sistema Operativo dependiente del
ASPII-SCSI Manager
Sistema Operativo
Aplicaciones
Descargar
| Enviado por: | Cngq |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.