Informática
Líneas de comunicación
SEÑALIZACIÓN RUIDO Y DISTORSIÓN
Ing. Electrónico
CORPORACIÓN UNIVERSITARIA DE COLOMBIAIDEAS
LINEAS DE COMUNICACION
BOGOTA D. C.
2001
OBJETIVOS
Conocer la importancia que tiene el ruido y la distorsión en líneas de comunicación y transmisión de datos.
Averiguar las distintas formas de detectar los errores en la transmisión de datos.
Conocer las diferentes clases de distorsión el las lineas de transmisión.
Clasificar los diferentes tipos de ruidos que se presentan en medios físicos.
Investigar los métodos que existen para la detección y respectiva corrección de errores en la transmisión de información.
DISTORSION
En las transmisiones de radio a menudo se introduce una forma de distorsión de amplitud al aumentar la intensidad relativa de las frecuencias más altas de audio. En el receptor aparece un factor equivalente de atenuación de alta frecuencia. El efecto conjunto de estas dos formas de distorsión es una reducción del ruido de fondo o estático en el receptor. Muchos de éstos van equipados con controles de tono ajustables por el usuario, de forma que la amplificación de las frecuencias altas y bajas se pueda adaptar a gusto del oyente. Otra fuente de distorsión es la modulación transversal, la transferencia de señales de un circuito a otro por culpa de un apantallamiento defectuoso. La distorsión armónica ocasionada por la transferencia no lineal de señales a través de las etapas de amplificación puede reducirse notablemente utilizando circuitería de realimentación negativa que anula gran parte de la distorsión generada en las etapas de amplificación.
Distorsión
Junto con el ruido, la distorsión es otra fuente de errores en la transmisión de datos. Consiste en la alteración de la información transmitida debida a factores naturales del medio de transmisión usado.
Dentro de los distintos tipos de distorsiones que se pueden presentar durante la comunicación de datos tenemos:
Distorsión por atenuación : Ocurre cuando las altas frecuencias pierden potencia con mayor rapidez que las frecuencias bajas durante la transmisión, lo que puede hacer que la señal recibida sea distorsionada por una pérdida desigual de sus frecuencias componentes. La pérdida de potencia está en función del método y medio de transmisión. Además, la atenuación aumenta con la frecuencia e inversamente con el diámetro del alambre. Este problema se evita con estaciones repetidoras que refuercen la señal cuando sea necesario.
Distorsión por retraso: Ocurre cuando una señal se retrasa más a ciertas frecuencias que a otras. Si un método de transmisión de datos comprende datos transmitidos a dos frecuencias distintas, los bits transmitidos a una frecuencia pueden viajar ligeramente más rápido que los transmitidos en la otra. Existe un dispositivo llamado igualador (o ecualizador) que compensa tanto la atenuación como la distorsión por retraso.
Los siguientes factores no son considerados como distorsión pero también representan problemas en la transmisión de datos:
El gorjeo: Es producido por imperfecciones en la señal portadora. Siempre hay pequeñas variaciones en la amplitud, fase y frecuencia. El daño a la señal puede deberse a cambios contínuos y rápidos en la ganancia y/o fase, lo que puede ser aleatorio o periódico y que se define como gorjeos.
Líneas cruzadas: Ocurre cuando una línea toma parte de la señal que va por otra línea. El problema de líneas cruzadas aumenta con la mayor proximidad de los dos alambres, con la mayor distancia de comunicaciones, a mayor intensidad de la señal y señales de frecuencia más alta. Generalmente la intensidad de la señal parásita baja, por lo que no molesta en las redes de comunicación de datos.
Eco: Consisten en repeticiones atenuadas de un mismo mensaje que regresan al equipo transmisor. Si la señal del eco tiene la intensidad suficiente para que la pueda detectar el equipo de comunicaciones provoca errores. Existen dispositivos especiales llamados supresores de eco que eliminan este problema al bloquear la línea en el sentido que no se está usando, con el fin de evitar recibir señales no deseadas.
Pérdida de línea: Es una causa catastrófica de errores y de transmisiones incompletas. Consiste en la desconexión de la línea de unión entre el transmisor y el receptor debida al equipo conmutador defectuoso de la oficina telefónica, o a daños directos a las líneas de comunicación
INFORMACIÓN TÉCNICA
DISTURBIOS ELÉCTRICOS
PICOS DE VOLTAJE
Son cambios rápidos de alta energía sobrepuestos en la línea de voltaje. Los picos pueden ser generados por estímulos inductivos al abrir o cerrar contactos de interruptores eventual o periódicamente.
Son de corta duración, del orden de nano y microsegundos, lo cual contribuye a un efecto no medible en RMS. Aunque este evento parezca pequeño, sus consecuencias son devastadoras en componentes de computación y equipos electrónicos, por la alta energía que maneja.
TRANSITORIOS DE VOLTAJE
Estos eventos de elevación o de disminución de voltaje ocurren por periodos de largo y corto tiempo causados por repentinos
cambios de carga sobre la línea de energía, como el encendido de motores, fuentes de poder, cortos circuitos o altas corrientes
en el consumo eléctrico.
DISTORCIÓN ARMÓNICA
Problemas que se presenta en la onda senoidal de la línea de voltaje debido a cargas con factor de potencias no lineales por lo que cada ciclo de voltaje alterno externo es afectado y con esto, la frecuencia y onda senoidal puede sufrir armónicos peligrosos para equipos electrónicos.
Las redes de computo y cualquier equipo son notablemente afectadas por estas variaciones de voltaje, por mencionar algunos problemas, observamos la pérdida de información, daños en fuentes de alimentación,
etc., representando para su empresa altos costos por pérdida de tiempo y mantenimiento correctivo.
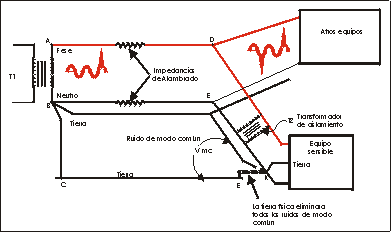
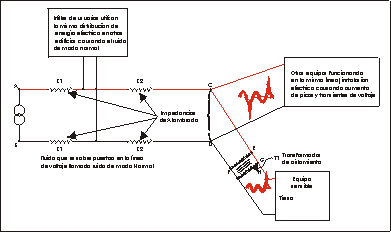
RUIDO DE MODO COMÚN
Este tipo de ruido es más frecuente, debido a que es provocado por
otras cargas conectadas directamente a la misma instalación eléctrica,
que no cuenta con tierra física adecuada o existen desbalanceos
cargas. Esto pueden ocasionar que cuando se enciendan o
apaguen cargas dentro de la misma línea, los picos y transientes
de voltaje sean conducidos por el propio neutro o tierra física hasta
los equipos electrónicos, ocasionando con esto daños considerables
a sus inversiones. Por lo tanto, cuando se efectué una instalación
eléctrica es necesario tomar en cuenta la colocación de la tierra física
con las adecuadas especificaciónes y que no se una con el neutro.
RUIDO DE MODO NORMAL
El ruido de modo normal es provocado básicamente por encendidos y apagados de cargas en la red eléctrica con el que se crean fuertes picos y transitorios de voltaje.
CORRECCION Y DETECCION DE ERRORES
Técnica de detección de errores:
BIT de paridad
LRC (Código de redundancia longitudinal)
CRC (Código de redundancia cíclica)
Hamming
Actualmente la técnica que mas se utiliza es la CRC esta técnica consiste en lo siguiente:
Se toma el bloque de información a enviar (I) como una secuencia de bits que forman un polinomio sin importar cuantos bits sean.
Se divide esta secuencia que esta multiplicada por 2 n entre un polinomio predefinido (p) de orden n(NFL) bits, usando la aritmética modulo 2.
El residuo ( R) es un polinomio de grado n-1, que se denomina CRC (n bits)
Se transmite la secuencia de bits 2n*I+R.
En el extremo receptor se realiza la división de todos los bits recibidos (La información mas el CRC entre el mismo polinomio que se utilizo para calcular el CRC). Si el residuo obtenido es 0, se toma la trama de información como valida.
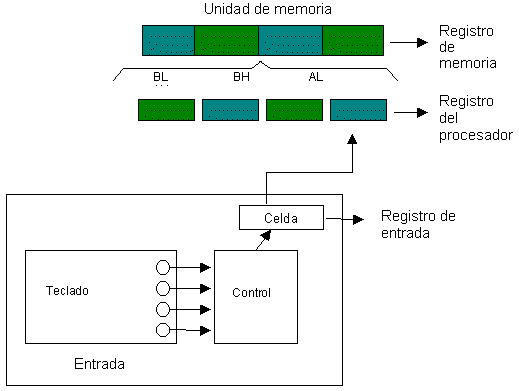
CÓDIGO DE DETECCIÓN DE ERRORES Y REGISTROS
Se aplican a las señales binarias, y se dividen en dos.
1.Por BIT de paridad.- Es el más utilizado.
2.Por BIT de parada.- aparte de detectar los errores, intenta corregirlo.
No se utiliza un circuito para mandar el estado de un bit, se usa un registro más y una vez llegada y comprobada la información y si es correcto todo se desecha el registro de estado.
Código de detección de errores.- Detecta el error y busca cual es el BIT que esta fallando, para arreglarlo.
Registros.- Grupo de celdas binarias agrupadas entre si, para obtener un código especificó
Es imposible crear un sistema fiable al 100%. Ni siquiera las RAMs se salvan: en el ambiente hay muchos tipos de radiación capaces de alterar el bit preciso para que nuestro programa cuelgue irremisiblemente el ordenador. Si bien la probabilidad de que ocurra es bastante baja para una sola celda de memoria (del orden de varios millones de años), cuando agrupamos varios millones de ellas para formar los tan comunes 4 megas, dicha probabilidad sube, hasta situarse en unos 20 días. Esta es la razón de que los grandes ordenadores incluyan un código de control en sus memorias.
El problema se agrava cuando no es solo nuestra paciencia la que depende de esos datos, sino, por ejemplo, los miles de millones de dolares invertidos en una misión espacial (la misión VOYAGER a los planetas exteriores), la seguridad económica de un pais (transacción electrónica de capital entre bancos), la salud de una persona (transferencia electrónica de partes clínicos entre hospitales) o la reputación de un sistema de grabación de música revolucionario (el Compact Disc). En estos casos, un error en un solo bit puede dar al traste con todo, por lo que se hace necesario el poder detectarlos y corregirlos.
Se han ideado multitud de sistemas de detección y corrección de errores. Si bien en general son muy distintos entre sí, todos se basan en añadir información extra a los datos originales, de tal forma que permitan detectar si han sido o no dañados, y recuperar la información original.
El sistema más simple de detección de errores es el llamado Checksum, o suma de comprobación. Se basa simplemente en añadir al final del bloque de datos la suma de todos ellos. El receptor debe comprobar que este dato se corresponde efectivamente con la suma de los datos recibidos. De no ser así, es que ha ocurrido un error, por lo que debe pedir al transmisor que repita el bloque de datos.
Normalmente, este sistema se aplica a pequeñas porciones del bloque total a transmitir; por ejemplo, cada 256 bytes o 1 Kbyte. De este modo, si sucede un error, la cantidad de datos a repetir es menor.
Un segundo sistema es el control de paridad. Se basa en añadir a cada porción del bloque un bit extra, el cual tomará el valor adecuado de forma que el número de bits a cero o a uno de la porción sea siempre par, o siempre impar, según sea el tipo de paridad escogido.
Este sistema se usa, por ejemplo, en las memorias de los PCs compatibles, para detectar si algún bit ha sido alterado. Sin embargo, el uso más común se le da en la transmisión de textos ASCII vía MODEM. Dado que el ASCII usa solo 7 bits, se suele aprovechar el octavo para fijar la paridad del byte que se transmite. De ese modo se puede saber si algún carácter ha resultado alterado. En caso de trabajar con textos en EBDIC, que son de ocho bits por carácter, es necesario usar un bit extra para la paridad, por lo que no se suele aplicar.
Estos dos métodos, si bien son de simple aplicación, tienen el inconveniente de que necesitan que les sea retransmitida la información errónea, con el consiguiente aumento de tiempo en la transmisión, así como la mayor complejidad del protocolo de comunicación.
Si bien con un MODEM no es muy problemático emplear unas centésimas de segundo para pedir de nuevo el bloque, en otros casos no se puede permitir tal pérdida de tiempo. Tal es el caso de, por ejemplo, las sondas espaciales destinadas a otros planetas del sistema solar, en las que una señal puede tardar en llegar al ingenio de entre 1,2 segundos (Luna) hasta más de cuatro horas (Neptuno y Plutón). En estos casos, además, debido a la naturaleza dinámica de la información a enviar, cuando llegue la señal de pedido, puede ser ya demasiado tarde.
Otro caso es, por ejemplo, los lectores de Compact Disc, o de CD-ROM. En ellos, los errores son muy frecuentes debidos a pequeños rayazos o partículas de polvo, que llegan a cubrir cientos de bits. Aquí no se puede volver a leer un sector, pues es seguro que el error permanecerá. Asimismo, debido a la naturaleza mecánica del medio, puede tardarse tanto en reposicionar la cabeza de lectura, que la pausa sea perceptible por el oído.
Es aquí donde los códigos de corrección de errores encuentran su mayor aplicación, pues, aunque aumentan la cantidad de información a transmitir, permiten recuperar los datos dañados a partir del bloque recibido, sin necesidad de volver a transmitirlo.
El sistema más simple de corrección de errores se basa en la fuerza bruta: consiste en repetir la información tres veces, de modo que si se pierde uno de los datos, quedarán los otros dos para descubrir cual era el adecuado. Tiene el grave inconveniente de que triplica la cantidad de los datos a transmitir, por eso no es muy utilizado.
Existe otro sistema mucho más fiable, consistente en añadir unas palabras de control intercaladas entre los datos. Es un sistema de redundancia cíclica. Sin embargo, no debemos confundirlo con el CRC, pues el CRC es sólo un sistema de detección de errores, pero no permite su corrección a partir de los datos recibidos, sino que estos deben ser reenviados.
Hay varias maneras de generar estas palabras. La más simple es coger dos datos adyacentes e intercalar entre ellos su suma. De este modo, si tenemos n datos de m bits cada uno, le añadiremos n-1 datos de m+1 bits cada uno. Luego, si se produce un error en una palabra, será fácil detectar cual es y recuperar su valor original con una simple resta.
Otra manera, mucho más versátil, se basa en aplicar el control de paridad a traves de una operación lógica XOR (OR EXclusivo). Esta es una función binaria de dos entradas y una salida, y cuyo funcionamiento es el siguiente: cuando sus entradas tienen el mismo valor (dos unos, o dos ceros), su salida es cero; cuando sus entradas tienen valores distintos, su salida es uno. Su tabla de verdad es la siguiente:
| Entradas | Salida |
| 0 XOR 0 | 0 |
| 0 XOR 1 | 1 |
| 1 XOR 0 | 1 |
| 1 XOR 1 | 0 |
Esta operación se aplica bit a bit a cada pareja de datos, y el resultado se intercala entre ellos. El procedimiento es el mismo que con la suma, pero tiene la ventaja de que los datos resultantes tienen el mismo número de bits que los de entrada. Además, si volvemos a aplicar la operación lógica XOR entre el resultado y uno de los datos, obtendremos el otro. Esto aumenta la velocidad de proceso del algoritmo.
Una de las grandes ventajas de este sistema es que permite realizar la codificación, descodificación y corrección de errores a medida que se va realizando la transmisión o la recepción, sin necesidad de almacenar una determinada cantidad inicial para poder proceder a su inspección. Sin embargo, tiene el inconveniente de que es muy sensible a los errores de explosión o de ráfaga.
¿Qué es un error de explosión? Cuando se produce un error en una transmisión, lo normal es que no sea un único bit el afectado, sino también una serie de bits adyacentes. En el caso de una transmisión de radio, por ejemplo, si se produce una interferencia, puede durar el tiempo suficiente como para volver erróneas varias decenas de bits; sin embargo, esos bits alterados no están distribuidos aleatoriamente, sino agrupados todos juntos en la zona del mensaje donde se produjo dicha interferencia. Asimismo, en un CD, una mota de polvo o un rayazo tapará unos cientos de bits, los cuales recibirán un valor erróneo; pero esos bits están situados correlativamente. Por eso se llaman errores de explosión: no dañan puntos aislados, sino que producen un gran cráter de errores concentrados.
Este sistema no es capaz de corregir con fiabilidad absoluta más de un error seguido, por lo que los errores de explosión resultan tremendamente peligrosos. Por eso se recurre a desordenar los datos antes de su transmisión, de modo que luego, al recibirlos, los posibles errores de explosión habrán afectado realmente a datos dispersos, y no a datos consecutivos.
Debido a lo que ya comentamos, es necesario que al menos dos de cada tres datos estén en buen estado si queremos recuperar la información sin problemas, luego es necesario separar entre sí los datos correspondientes a las posiciones N, N+1 y N+2 como mínimo. De este modo aseguramos que la información necesaria para recuperar un dato no se encuentra consecutiva a dicho dato.
Una manera de desordenar dicha información consiste en agrupar todos los datos en tres, de modo que en el primer bloque estén los datos situados en N, N + 3, N + 6, N + 9..., en el segundo bloque los datos situados en N + 1, N + 4, N + 7, N + 10..., y en el tercer bloque los datos situados en N + 2, N + 5, N + 8, N + 11... Para aumentar el desorden, se puede aumentar a 4 o más el número de bloques a crear, y para simplificar el proceso de reordenamiento y permitir una operación más o menos en tiempo real, se pueden usar grupos de una longitud fija, p.e. 256 bytes. De este modo, se cogen los primeros 256 bytes, se desordenan y se envían; luego los siguientes 256 bytes, se desordenan y se envian;... así sucesivamente. Dado que el último dato de un grupo y el primero del grupo siguiente, una vez reordenados, van igualmente consecutivos, puede ser conveniente agrupar los tres bloques que forman el primer grupo en orden ascendente, y los tres bloques que forman el segundo grupo en orden descendente; así sucesivamente; de este modo ningún byte que sea consecutivo de otro antes del desordenamiento lo seguirá siendo después de éste, reduciendo de este modo la posibilidad de que un error de explosión machaque datos necesarios para la recuperación.
Un dato importante a la hora de elegir un sistema de desordenamiento es el número máximo de bytes seguidos que es capaz de perder sin posibilidad de recuperación. En nuestro caso, ese número coincide con la longitud de cada bloque de bytes. De este modo, si tomamos grupos de 3072 bytes (3K) y hacemos tres bloques por grupo, podremos perder un máximo de 1024 bytes seguidos si queremos poder seguir recuperando la información. Otros tamaños y otros números de grupos dan distintas cantidades de bytes posibles.
Por poner un ejemplo, el sistema de corrección de errores del Compact Disc es capaz de recuperar hasta 14000 bits seguidos erróneos. Discos con agujeros de 2 milímetros en su superficie son reproducidos sin ninguna clase de errores.
Este sistema es, sin duda, muy simple. Existen otros como el Red Salomón, o la Clave Golay, mucho más eficientes (y complejos de entender), y son los que se usan en las sondas espaciales, los lectores de CD, etc.
El uso de estas técnicas de corrección de errores supone sin duda una valiosa ayuda a la hora de transmitir información a traves de canales ruidosos. Sin embargo, como es lógico, no podemos pedirles imposibles. Si bien son más seguras que la transmisión de los datos sin protección, siempre es posible que surja algún error fatal que destruya parte de la información sin posibilidad de corrección. Afortunadamente para todos, son casos muy extremos y muy poco probables.
REPRESENTACION FASORIAL DE LA SEÑAL AM
La modulación de AM se puede tratar como una suma de fasores, uno por cada línea espectral que la componen. De ésta forma, la envolvente de la señal de AM es el resultado de la suma fasorial de su portadora y de los espectros de las bandas laterales. La suma es equivalente a una adición de vectores. No obstante, estos vectores rotan. El fasor correspondiente a la banda lateral inferior es el que rota más lento, luego le sigue el fasor de la portadora y por último el de la banda lateral superior. Los tres giran en sentido antihorario, pero si consideramos al fasor de la portadora como fijo, entonces el fasor de la banda lateral inferior se moverá relativamente en sentido horario :
![]()


la representación es :
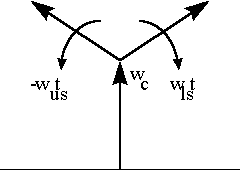
El movimiento de estos fasores produce, al sumarse que la señal modulada cambie de amplitud, presentando máximos y mínimos en los puntos donde ellos coinciden en dirección y sentido o se oponen.
Es importante destacar que la resultante de la suma de los fasores de las bandas laterales es colilneal con el fasor de la portadora, por lo que va a varíar en la señal resultante (la modulada) va a ser solo la amplitud. Esto es diferente en una señal de FM, en la cual varía la frecuencia y la amplitud es constante.
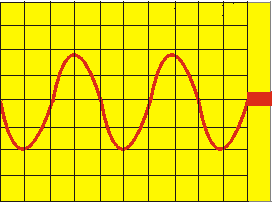
EL PATRON TRAPEZOIDAL
El patrón trapezoidal es una forma sencilla y práctica de determinar el índice de modulación (m) de una señal AM. Esté índice se puede determinar examinando la amplitud de la onda de salida, pero este método provee una salida más estable y de más fácil observación.
El patrón se obtiene inyectando a un osciloscopio las señales moduladora (la información) y la señal de AM. Esto se hace en el modo X-Y. La señal moduladora es la que se inyecta al canal X.
![]()
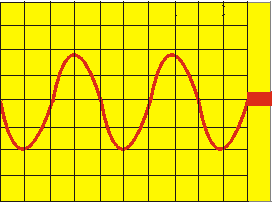
Como consecuencia de la relación directa entre las amplitudes de ambas señales, cuando la señal moduladora desplaza el rayo de electrones a la derecha de la pantalla, la señal de AM lo hace hacia arriba y abajo con mayor amplitud y con menor mientras más a la izquierda se encuentre el barrido.
En el punto de máxima tensión de la señal de AM, el patrón tendrá un valor de pico a pico igual a aquel, en el lado derecho, y en el lado izquierdo, donde la señal de AM tiene su mínimo, será éste el valor de pico a pico del lado del trapecio.
![]()
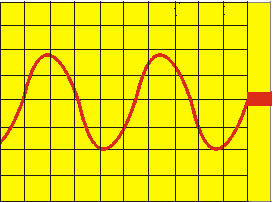
Ahora se demostrará como se relacionan estas amplitudes con el factor de modulación. En forma intuitiva puede verse que el mismo depende de alguna relación de cocientes entre estos parámetros porque dependen directamente del tamaño relativo entre el valor pico de la señal de información (moduladora) y la portadora :


Igualando :


Finalmente :

Cuando la modulación ocurre al 100%, el voltaje mínimo es igual a cero y el trapecio se vuelve un triángulo isósceles (está de lado) que no completa en su altura el ancho del recorrido en X :

Si la señal de audio y la portadora tienen diferencias de fase, pueden aparecer distorsiones como las siguientes :

Este caso y el siguiente indican que hay una mala modulación.

Formatos de transmisión
Se llama sincronización al proceso mediante el que un emisor informa a un dispositivo receptor sobre los instantes en que van a transmitirse las correspondientes señales.
Sincronización por bit
Debe reconocerse el comienzo y el fin de cada bit.
Sincronización por carácter
Debe reconocerse el comienzo y el final de cada unidad de información, como puede ser un carácter o una palabra transmitida.
Transmisión sincronía
Es una técnica que consiste en el envío de una trama de datos (conjunto de caracteres) que configura un bloque de información comenzando con un conjunto de bits de sincronismo (SYN) y termina con otro conjunto de bits de final de bloque (ETB). En este caso, los bits de sincronismo tienen la función de sincronizar los relojes existentes tanto en el emisor como en el receptor, de tal forma que éstos controlan la duración de cada bit y carácter.
Transmisión asíncrona
Consiste en acompañar a cada unidad de información de un bit de arranque (start) y otro de parada (stop). Esto se consigue manteniendo la línea a nivel 1, de tal forma que el primer 0 es el bit de arranque y a continuación se transmiten los bits correspondientes al carácter, terminando la transmisión con un bit 1, cuya duración mínima sea entre una y dos veces la de un bit. La línea se mantendrá en este nivel hasta el comienzo de la transmisión del siguiente carácter.
Modos de transmisión
Transmisión en paralelo
Los movimientos de datos en el interior de una computadora se realizan mediante un conjunto de bits que configuran una palabra de computadora, siendo tratados simultáneamente, es decir, en paralelo. Para una transmisión de datos a larga distancia realizándose en paralelo, serían necesarios tantos circuitos como bits.
Transmisión en serie
Debido a que resulta demasiado costosa la implementación de la trasmisión de datos a larga distancia en paralelo, se utiliza la transmisión en serie, enviándose los bit uno detrás de otro. Esta transmisión tiene la desventaja de ser más lenta que la transmisión en paralelo, debido a su característica de secuenciamiento de bits.
Medios de transmisión
La información que maneja una computadora es de origen digital, encontrándose codificada a partir de un alfabeto de dos símbolos que se corresponden con 1 y 0 o, lo que es lo mismo, presencia o ausencia de una señal eléctrica. Para la transmisión de esta información entre dispositivos distintos a larga o corta distancia debe utilizarse un medio físico que asegure su correcta recepción en el destino.
Existen dos tipos de medios de transmisión de datos:
-
Medios guiados, que incluyen a los cables metálicos (cobre, aluminio, etc.) y de fibra óptica. El cable se instala normalmente en el interior de los edificios o bien en conductos subterráneos. Los cables metálicos pueden presentar una estructura coaxial o de par trenzado, y el cobre es el material preferido como núcleo de los elementos de transmisión de las redes. El cable de fibra óptica se encuentra disponible en forma de hebras simples o múltiples de plástico o fibra de vidrio.
-
Medios no guiados, relativos a las técnicas de transmisión de señales a través del aire y del espacio entre transmisor y receptor (radio enlaces). La transmisión por infrarrojos y microondas cae dentro de esta categoría.
Medios guiados
Par trenzado
El cable de par trenzado consiste en un núcleo de hilos de cobre rodeados por un aislante, los cuales se encuentran trenzados por pares, de forma que cada par forma un circuito que puede transmitir datos. Un cable consta de un haz de uno o más pares trenzados rodeados por un aislante. El par trenzado sin apantallar (UTP, Unshielded Twisted Pair) es usual en la red telefónica, y el par trenzado apantallado (STP, Shielded Twisted Pair) proporciona protección frente a la diafonía. Precisamente es el trenzado el que previene los problemas de interferencia. Conforma una tecnología relativamente barata, bien conocida y sencilla de instalar. Es el cable utilizado en la mayoría de las instalaciones de redes de comunicaciones. Sin embargo, presenta una serie de características eléctricas que imponen ciertos límites a la transmisión. Por ejemplo, es resistente al flujo de electrones, lo que limita la distancia de transmisión. Produce radiación de energía en forma de señales que se pueden detectar, además de ser sensible a la radiación externa que puede producir distorsión sobre la transmisión. Sin embargo, los productos en uso admiten una velocidad de transmisión sobre Ethernet de hasta 100 Mbps.
Cable coaxial
El cable coaxial consta de un núcleo de cobre sólido rodeado por un aislante, una especie de combinación entre pantalla y cable de tierra y un revestimiento protector exterior. En el pasado, el cable coaxial permitió una transmisión más alta (10 Mbps) que el cable de par trenzado, aunque las recientes técnicas de transmisión sobre par trenzado igualan e incluso superan la velocidad de transmisión por cable coaxial. Sin embargo, los cables coaxiales pueden conectar los dispositivos de la red a distancias más largas que los de par trenzado. A pesar de ser el cable coaxial el medio tradicional de transmisión en redes basadas en Ethernet y ARCNET, la utilización de par trenzado y fibra óptica ya es muy común hoy en día sobre este tipo de redes.
Fibra óptica
El cable de fibra óptica transmite señales luminosas (fotones) a través de un núcleo de dióxido de silicio puro tan diáfano que un espesor de más de tres millas del mismo no produce distorsión en una visión a su través. La transmisión fotónica no produce emisiones externas al cable, sin ser afectada por la radiación exterior. El cable de fibra se prefiere cuando existen ciertos requisitos de seguridad. La conversión electrónica de los valores lógicos 1 y 0 en destellos de luz permite la transmisión de las señales a través del cable de fibra óptica. Un diodo emisor de luz, situado en un extremo, emite destellos que se transmiten por el cable hasta el otro extremo, donde se recogen por un simple fotodetector y se convierten en señales eléctricas. Puesto que no existe una resistencia a las señales transmitidas, la velocidad de transmisión por fibra óptica supera en prestaciones ampliamente a la transmisión por cable de cobre.
Radio enlaces
Se basan en la propagación de ondas electromagnéticas a través del aire. Para ello sólo requieren la estación emisora y receptora , además de posibles repetidores intermedios para salvar la orografía del terreno, ya que este tipo de transmisión exige visibilidad entre las dos estaciones emisora y receptora. En la actualidad existen los siguientes tipos de radio enlaces: de onda corta, sistemas terrestres de microondas y sistemas basados en satélites de comunicaciones. La transmisión mediante microondas se lleva a cabo en una gama de frecuencias que va desde 2 a 40 GHz. Cuando las distancias son extremadamente grandes, el número de repetidores sería también grande. Además, si tenemos en cuenta la superficie terrestre recubierta de agua donde la instalación de repetidores sería compleja, se utilizan los satélites de comunicaciones soportados sobre satélites artificiales geoestacionarios, es decir, que no modifican su posición respecto a la tierra.
CONCLUSIONES
Con este trabajo aprendimos las diferentes clases de distorsión en las lineas de comunicación como por atenuación y por retraso, Las redes de computo y cualquier equipo son notablemente afectadas por las variaciones de voltaje. El ruido de modo normal es provocado básicamente por encendidos y apagados de cargas en la red eléctrica con el que se crean fuertes picos y transitorios de voltaje. Hay dos diferentes clases de distorsión es una reducción del ruido de fondo o estático en el receptor.
Descargar
| Enviado por: | Nana |
| Idioma: | castellano |
| País: | Colombia |
Todos los derechos reservados.