Electrónica, Electricidad y Sonido
Controladors PID'S Valmet
L'objectiu d'aquesta pràctica es veure algunes de les possibles prestacions que podem obtenir del controlador PID, cal seguir de forma ordenada cada un dels apartats que s'indiquen a continuació, i que per poder—los resoldre a part del controlador farà falta també el manual del mateix.
1.- Identificar cada un del pulsodors del teclat del PIC, i comprovar el seu funcionament.
PV/SP Procès value / Set point (pulsar durant tres segons per entrar a la configuració dels paràmetres a no ser que hi hagui codi d'acces password)
L/R Local / Remot set point (punt de consigna)
SP (up)
SP (down) Ajust del set point local
A/M Mode de funcionament automàtic o manual
OUT (up)
OUT (down) Ajust de la sortida en manual directament
SP (up) + A/M + OUT (down) durant tres segons farà reiniciar el controlador
Barra indicadora desviació -> Visualització del porcentatge de desviació entre el SP i el PV.
2.- Entrar en el “mode selection”, del PID, i comprovar com es mou amb els diferents “controls d'operació”, com són els “PA->paràmetres”, “CA->calibració”, “FS->paràmetres per defecte”. A continuació forçar un restabliment dels paràmetres per defecte, ja que no sabem en quin estat de programació es troba el PID. Fer un FS, factory setup. Comprovar que els paràmetres per defecte són els que s'indiquen a la pàg. 29, columna default i llegir-se tots els paràmetres que és possible programar.
PA -> Paràmetres de configuaració del controldador.
CA -> Calibració de les entrades i sortides analògiques (no afectades per un FS)
FS -> Factory setup. Reestabliment dels paràmetres per defecte per iniciar una nova programació partint de cero i evitant problemes que puguin vindre derivats d'altres programes anteriors. (La calibració de les entrades i sortides analògiques no es veuen afectades pel fet de fer un factory setup). (Cal pulsar durant tres segons A/M fins que FS fassi intermitències per fer un factory setup).
Paràmetres configurables:
1.x -> Configuració PID
2.x -> Configuració controlador PID
3.x -> Configuració valors mesurats
4.x -> Configuració setpoints
5.x -> Configuració sortides
C.x -> Bus comunicació
P.x -> Altres paràmetres
L.x -> Valors mesurats linealització
3.- Comprovar el connexionat de les entrades analògiques AI1 i AI2, i la sortida analògica A=, això com també les entrades digitals BI1 i VI2, com les sortides digitals BO1 i BO2.
Entrades analògiques:
-
AG-AI1 Valor mesurat
-
AG-AI2 Set point remot
Entrades digitals:
-
BG-BI1 Forçament del control manual
-
BG-BI2 Interlock forçament de la sortida
Sortida analògica:
-
AG-AO Valor sortida actuador
Sortides digitals:
-
BG-BO1 Alarma nivell mínim
-
BG-BO2 Alarma nivell màxim
L'ajust del senyals d'entrada i sortida analogic dins CA -> Calibració es pot fer directament amb miliampers o amb valor numeric, pulsanr L/R per seleccionar el mode.
Les correspondències que s'han observat son:
0mA -> 0000
4mA -> 0783
12mA -> 2367
20mA -> 3914
En manual, el senyal de sortida es ajustable pel teclat i en automàtic aquest valor ve donat pel càlcul en funció de la programació del PID.
4.- Estudiar l'esquema funcional intern dels paràmetres del PID
L'esquema funcional intern del PID esta dividit en quatre parts fonamentals:
-
MEAS -> Mesurament dels valors AI1 (entrada mesura senyal), BO1 (limit alt), BO2 (limit baix).
-
SETP -> Selecció del Set Point local o remot, local pel teclat o remot pel AI2.
-
CONTR -> Control PID capturant el S.P. local o remot i el senyal d'entrada filtrat o no, aplicant la formula:
![]()
-
OUT -> Configuració de la sortida directe o inversa i filtre opcional.
5.- A continuació es farà una programació d'una aplicació d'un PID, per controlar una temperatura, de manera que compleixi el següent funcionament:
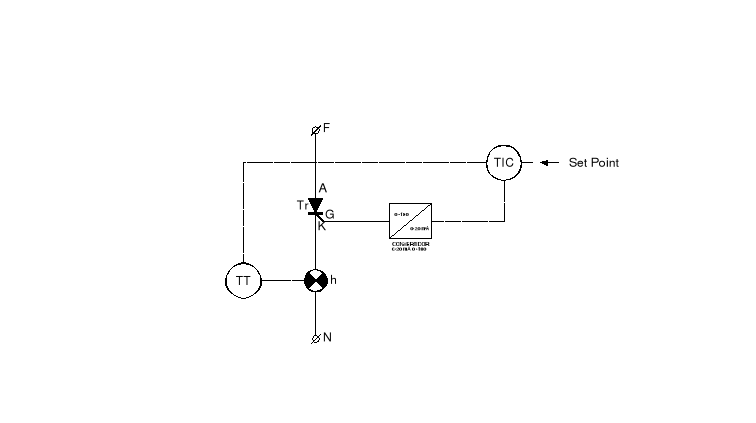
5.1.- L'entrada de la medició serà provinent d'una PT-100, a través d'un convertidor R-I amb el que vol dir que el senyal de mesura anirà entre 4 i 20 mA, per una temperatura entre 0 i 75 ºC.
Per fer-ho s'han modificat els paràmetres P-4 -> 0 (limit inferior), P-5-> 750 (limit superior), P-6-> 1 (número de digits).
L'entrada 4-20 mA s'ha calibrat amb 1C0 -> 4mA, 1C1 -> 20 mA
5.2.- La sortida de senyal s'aplicarà a un convertidor I -> Angle de disparo, i estarà preparat per un senyal de 0 a 20 mA.
Per fer-ho s'han modificat els paràmetres 2-1-> 0 (limit inferior), 2-2->100 (limit superior).
La sortida 0-20 mA s'ha calibrat amb 3C0 -> 0mA 3C1 -> 20mA
5.3.- S'establiran una alarma de nivell mínim de temperatura i una altre de nivell màxim.
La programació de l'alarma de temperatura mínima s'ha efectuat modificant els paràmetres 3-4 -> 30 (valor de disparo) i 3-5 -> 1 (histèresis).
La programació de l'alarma de temperatura màxima s'ha efectuat modificant els paràmetres 3-6 -> 50 (valor de disparo) i 3-7 -> 1 (histèresis).
S'ha comprovat que l'activació d'aquestes alarmes, a banda de donar una senyalització visual a la pantalla, també tanquent el contacte corresponent de les sortides binaries de l'equip.
5.4.- Per evitar fluctuacions de la mesura es programarà un filtre.
S'ha inplantat un filtre de 3 segons del senyal d'entrada, per evitar possibles fluctuacions de l'actuació del controlador en funció de la mesura del senyal d'entrada.
5.5.- Comprovar l'actuació del bloc PID en AUTO, i veure l'acció dels ajustos de la part proporcional “KP”, de la part integral i de la part derivativa.
| Cas ( a ) | Cas ( b ) | Cas ( c ) | Cas ( d ) | |
| Kp (proporcional) | 24 | 12 | 12 | 12 |
| Ti (integral) | 1.1 | 1.1 | 13 | 13 |
| Td (derivativa) | 0 | 0 | 0 | 12 |
Resultats obtinguts de les proves de funcionament del controlador PID en funció de la programació dels factors proporcional, integral i derivatiu:
Cas ( a ) : Al ser el factor Kp bastant elevat s'ha observat que desegida que hi havia una desviació entre el set point desitgat i el valor mesurat, la sortida acutava de forma molt ràpida i brusca, passant de cero a cent ràpidament.
Cas ( b ) : El fet de baixar el factor proporcional i mantindre la resta al mínim ha fet que la brusquetat amb la que anteriorment actuava el controlador per un petit error del funcionament s'hagui vist reduïda considerablement. Ara cal una variació més gran entre el set point i el valor mesurat perque la sortida arribi al 100 % del seu valor.
Cas ( c ) : En aquest cas s'ha augmentat el factor integral de la regulació del controlador la qual cosa amorgeix considerablement l'actuació d'aquest fent reduïr la velocitat de resposta del controlador. Això provocaria una gràfica més ondulada fins arribar a igualar el set point amb la mesura.
Cas ( d ) : Aquest cas te la característica de tindre un factor derivatiu inclos al integral i proporcional anteriorment provats. Aquest fet provoca que el controlador reaccioni de forma brusca davant variacions de l'entrada, fent reaccionar ràpidament l'equip. Aquest factor no s'utilitza molt i es dessitgable especialment per casos de controls de nivell en els que hi pugui haver una demanda molt forta en un moment donat de cabal o que tinguin tuberies molt llargues que alenteixin el procés provocant inestabilitats.
5.6.- Determinar que quan hi hagi l'alarma de nivell mínim, el senyal de sortida es quedi fixat al 75 % fins que l'alarma desaparegui.
Per fer-ho s'ha cablejat la soritda del contacte d'alarma de temperatura mínima amb l'entrada d'interlock, de forma que l'activació per hardware d'una sortida activi l'entrada de interlock.
Per programar l'interlock s'han modificat els següents paràmetres: 2-6 -> 75 (porcentatge fixe a la soritda) i 2-7 -> 100 (velocitat actuació
5.7.- Ha d'haver-hi la possibilitat de funcionar en set point remot.
Per permetre treballar amb set point remot, ha calgut modificar els següents paràmetres: 4-1 -> 1 (habilitació de set point remot), 4-2 -> 0 (filtre del set point remot), 4-3 ->1000 (ratio o porcentatge que li apliquem al senyal rebut de set point), 4-5 -> 0 (limit inferior del set point remot) 4-6 -> 75 (limit superior del set point remot).
La calibració de l'entrada analògica s'ha fet a CA -> 2C0 -> 4mA i 2C1 -> 20mA
5.8.- Determinar que despres d'un reset, el controlador passi a treballar en mode control com a PID.
Per fer-ho cal posar P-1 -> 0
5.9.- Determinar que després d'un resset, el controlador passi a funionar en MAN, independenment de com ho estigués fent abans del resset.
Per fer-ho cal posar 2-3 -> 1
5.10.- Ajustar el brillo del display.
Es pot ajustar al paràmetre P-8 -> 15 (màxim)
6.- Control de nivell:
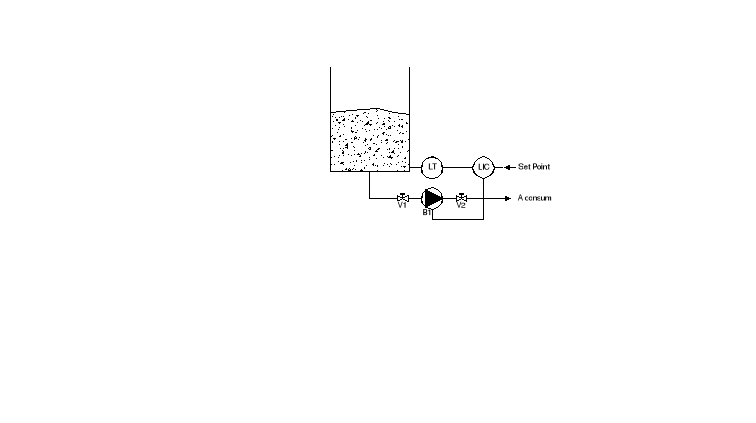
6.1.- Realitzar un control de nivell d'un dipòsit de forma simple, en feedback, amb una escala 0 a 100 % i per un senyal d'entrada de 4 a 20 mA. El senyal de sortida del controlador serà de 0 a 100 %, 4 a 20 mA. Haurà de complir les següents condicions:
Entrada analògica ajustada de 0 a 100 a P-4 i P-5 respectivament.
Calibració efectuada a CA -> 1C0 -> 4mA 1C1 -> 20mA.
Sortida analògica ajustada de 0 a 100 a 2-1 i 2-2 respectivament.
Calibració efectuada a CA -> 3C0 -> 4mA 3C1 -> 20mA.
-
Activar una alarma per sota del 30 % del nivell
Per fer-ho s'han ajustat els paràmetres 3-4 -> 30 i 3-5 -> 1
-
Al donar tensió ha de passa a funcionar tal com estava avans, tant si era manual com automàtic.
Per fer-ho s'ha modificat el paràmetre 2-3 -> 0
-
Al donar tensió que passi a mode control, i els paràmetres han d'esser inaccessibles pels operaris.
Cal modificar el paràmetre P-1 -> 0
-
Evitar que les fluctuacions del nivell puguin desestabilitzar el control.
S'ha programat un filtre de 2 segons al paràmetre 3-1 -> 2
-
La precisió del display ha d'esser d'un decimal.
Ajust fet a P-6 -> 1 (número de decimals)
-
El control ha d'actuar de forma ràpida, i amb les mínimes oscil.lacions del nivell.
Despres de varies proves s'han acabat per deixar programats els següents valors pels factors proporcional, integral i derivatiu:
Kp -> 1-1 -> 16
Ti -> 1-2 -> 3.2
TD -> 1-3 -> 3.2
6.2- Control de nivell en cascada:
El mateix cas que el de l'apartat anterior però es farà un control en cascada utilitzant el senyal de cabal, això vol dir que s'hauran d'emprar dos controladors, i que la sortida del primer serà el control del nivell i s'aplicarà com a set point del segon que és el que controlarà el cabal.
Un cop muntat tot el sistema amb la maqueta, s'han comencat a programar els PID's i filtres de senyal de cada controlador per separat. Per fer-ho, s'han aïllat l'un de l'altre posant el primer controlador en manual per mantindre el set point del segon fixe, i s'ha procedit a programar el segon controlador seguint el següent metode:
Incialment s'ha posat un factor proporcional algo elevat, sense derivativa i integral. Posteriorment, al veure les oscil.lacions que es produïen, s'ha anat baixant lleugerament la proporcional i augmentant la integral fins assolir la regulació dessitgada. El factor diferencial no s'ha tocat.
Despres s'ha fet el mateix pel controlador de nivell fins aconseguir que, amb la maqueta en marxa, el nivell no oscil.les més d'un 1 % respecte el set point dessitgat. El llaç de control absorvia bé les demandes màximes de cabal actuant de forma ràpida per evitar perdre nivell i tancava soritda ràpidament quan el nivell havia estat assolit.
La programació del filres de senyal i factors PID's final ha estat la següent:
-
Filtre del senyal de cabal 5 segons.
-
Filtre del set point cap al segon controlador 2 segons.
-
Factor proporcional del controlador de nivell 16
-
Factor integral del controlador de nivell 6.4
-
Factor derivatiu del controlador de nivell 0
-
Factor proporcional del controlador de cabal 12
-
Factor integral del controlador de cabal 3.2
-
Factor derivatiu del controlador de cabal 0
Descargar
| Enviado por: | Kal Trempat |
| Idioma: | catalán |
| País: | España |
Todos los derechos reservados.