Electrónica, Electricidad y Sonido
Control motor de continua
CONTROL MOTOR DE CONTINUA
Lo que queremos hacer es un circuito que controle la velocidad de estos tipos de motores, la velocidad sera controlada por medio de una rueda que tendra tres estados, como si fueran tres interruptores, estas combinaciones haran que el motor vaya al 100% de su capacidad, otra posición hara que vaya al 75%, y la otra posición hara que vaya al 25%.
Frecuentemente, se intenta controlar un motor DC mediante una resistencia variable conectada a un transistor. Si bien este sistema funciona, genera gran cantidad de calor y perdidas de potencia. Controlando la velocidad de un motor DC mediante la modulación por ancho de pulso se elimina ese problema. Cuanto más ancho es el pulso, mayor es la velocidad del motor y viceversa.
Como nosotros vamos a hacer el control de este motor mediante un pic, no podremos sacar del pic una señal distintas a las establecidas para la tecnología TTL, con lo que jugaremos con la duracion de los estados altos o bajos que salgan de este, es decir, según dejemos que salga del pic un estado alto un determinado tiempo ( estando el tiempo restante en estado bajo), haremos que vaya mas o menos ràpido. Por ejemplo si queremos que el motor vaya al 100% de la velocidad que tenga le daremos un estado alto todo lo que dure su periodo y asi tendra de media de tension la maxima, que es la tension que necesita para ir al 100% de su capacidad, estos motores toman como tension la media de entrada. Este control se efectua dependiendo de la duracion del periodo que tenga el motor. El que vamos a utilizar tiene un periodo de 10ms, y la tabla que efectuamos es la siguiente:
| Posición uno 100% | |
| Posición dos 75% | |
| Posición tres 25% |
Estas posiciones se refieren a las posiciones de la rueda
Siendo la posición uno la posición de mas arriba( 100%) y la tres la de abajo(25%)
Para poder controlar los pulsos que salen del pic al motor hemos hecho un programa en MPlab con el que controlaremos la velocidad:
;*******************************************************************************
;Motor en continua
;*******************************************************************************
List p=16f84
include"P16f84.inc"
PDel0 equ 0x15 ; nombramos las variables
PDel1 equ 0x16
PDel2 equ 0x17
PDel3 equ 0x18
PDel4 equ 0x19
PDel5 equ 0x20
PDel6 equ 0x21
PDel7 equ 0x22
PDel8 equ 0x23
PDel9 equ 0x24
org 0x00 ; punto de origen
goto Inicio
org 0x05; saltamos el vector de interrupción
;************************************************************************************
Creamos las demoras para controlar el tiempo que va estar el pulso( 1 ) o el pulso (0)
;************************************************************************************
DEM25A movlw .7 ; 1 set numero de repeticion (B)
movwf PDel0 ; 1 |
PLoop1 movlw .88 ; 1 set numero de repeticion (A)
movwf PDel1 ; 1 |
PLoop2 clrwdt ; 1 clear watchdog
decfsz PDel1, 1 ; 1 + (1) es el tiempo 0 ? (A)
goto PLoop2 ; 2 no, loop
decfsz PDel0, 1 ; 1 + (1) es el tiempo 0 ? (B)
goto PLoop1 ; 2 no, loop
PDelL1 goto PDelL2 ; 2 ciclos delay
PDelL2 clrwdt ; 1 ciclo delay
return ; 2+2 Fin.
;************************************************************************************
DEM100 movlw .8 ; 1 set numero de repeticion (B)
movwf PDel8 ; 1 |
PLoop9 movlw .249 ; 1 set numero de repeticion (A)
movwf PDel9 ; 1 |
PLoop10 clrwdt ; 1 clear watchdog
clrwdt ; 1 ciclo delay
decfsz PDel9, 1 ; 1 + (1) es el tiempo 0 ? (A)
goto PLoop10 ; 2 no, loop
decfsz PDel8, 1 ; 1 + (1) es el tiempo 0 ? (B)
goto PLoop9 ; 2 no, loop
PDelL5 goto PDelL6 ; 2 ciclos delay
PDelL6 clrwdt ; 1 ciclo delay
return ; 2+2 Fin.
;************************************************************************************
DEM75A movlw .6 ; 1 set numero de repeticion (B)
movwf PDel4 ; 1 |
PLoop5 movlw .249 ; 1 set numero de repeticion (A)
movwf PDel5 ; 1 |
PLoop6 clrwdt ; 1 clear watchdog
clrwdt ; 1 ciclo delay
decfsz PDel5, 1 ; 1 + (1) es el tiempo 0 ? (A)
goto PLoop6 ; 2 no, loop
decfsz PDel4, 1 ; 1 + (1) es el tiempo 0 ? (B)
goto PLoop5 ; 2 no, loop
clrwdt ; 1 ciclo delay
return ; 2+2 Fin.
************************************************************************************
Inicio
bsf STATUS, RP0; vamos al banco correspondiente con los TRIS
movlw b'00000111' ; definimos entradas y salidas en TRISA
movwf TRISA
clrf TRISB
bcf STATUS, RP0 ;cambio de banco
clrf PORTB
btfss PORTA,0
goto velo_100 ; vamos a una de las rutinas que hemos creado( rutina del 100% de ;velocidad)
btfss PORTA,1
goto velo_75
btfss PORTA,2
goto velo_25
goto Inicio
velo_100
bsf PORTB,0
call DEM100 ;tiempo que va a estar a estado alto
btfsc PORTA,0
goto Inicio
goto velo_100
velo_75
bsf PORTB,0
call DEM75A ; tiempo que va a estar a estado alto (7,5 ms)
bcf PORTB,0
call DEM25A ; tiempo que va estar a estado bajo ( 2,5ms)
btfsc PORTA,1
goto Inicio
goto velo_75
velo_25
bsf PORTB,0
call DEM25A ; tiempo a estado alto( en este caso 2,5 ms)
bcf PORTB,0
call DEM75A
btfsc PORTA,2 ; tiempo a estado bajo ( 7,5 ms)
goto Inicio
goto velo_25
end ; fin del programa
Este programa solo funcionara para un tipo de interruptor como el que ponemos en el esquema, ya que si pusieramos tres interruptores de los normales, el programa entraria en error, o funcionamiento indeterminado.
Para simularlo hemos utilizado el programa Proteus, y el esquema es el siguiente:
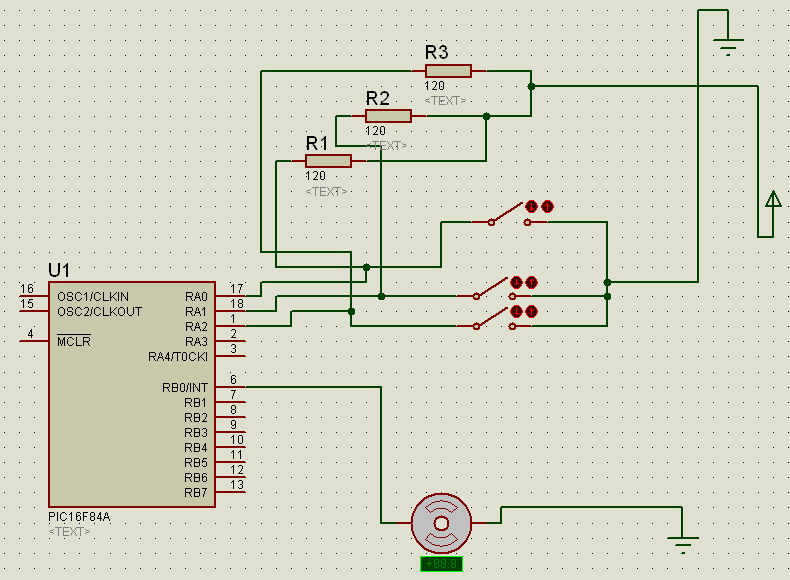
El indicador que hay debajo del motor indica las revoluciones que da por minuto.
Duracion completa del periodo 10 ms
Estado
alto
V
T
Duracion completa del periodo 10 ms
Estado
alto
V
T
7.5ms
2.5ms
Estado
bajo
7.5ms
2.5ms
T
V
Estado
alto
Duracion completa del periodo 10 ms
Descargar
| Enviado por: | Galdric |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.