Tecnología
Brazo robot
ESTUDIO
DEL
SISTEMA
DE UN
BRAZO ROBOT
.INDICE.
Descripción de las partes de la máquina……..pag. 3, 4 y 5.
*Introducción.
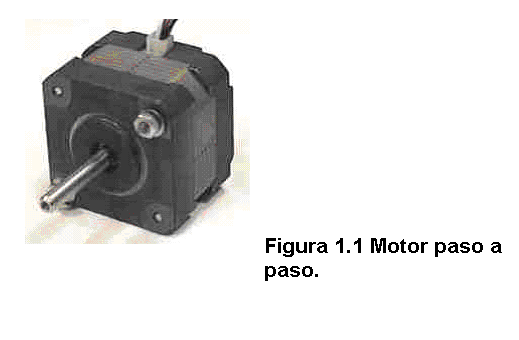
*Motor paso a paso (Bipolar): Características y funcionamiento.
*Descripción de las partes de la cinta transportadora.
Estudio de alternativas………………………….…..pag. 6.
*1ª. Alternativa.
*2ª. Alternativa.
*3ª. Alternativa.
Cuestiones…………………………………………..pag. 7.
*1ª. Cuestión.
*2ª. Cuestión.
DESCRIPCIÓN DE LAS PARTES DE LA MÁQUINA.
INTRODUCCIÓN:
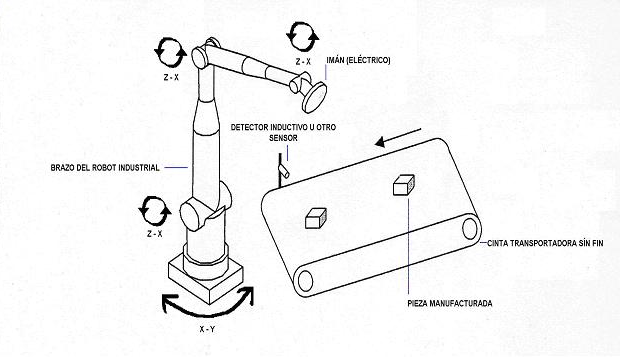
El brazo del robot industrial está compuesto por cuatro rodillos (como se puede ver en la figura anterior); uno de ellos gira en torno a los ejes X - Y, y los tres rodillos restantes que componen el brazo giran en torno a los ejes Z - X. Este brazo funciona mediante un motor paso a paso.
Motor paso a paso (Bipolar): Características y funcionamiento.
Como todo motor, el motor paso a paso es un conversor electromecánico, que transforma la energía eléctrica en mecánica; pero de un modo distinto a como lo hace un motor de C. C. (corriente continua).
.
Mientras que un motor convencional gira libremente al aplicar una tensión comprendida dentro de ciertos límites; el motor paso a paso está concebido de tal manera que gira un determinado ángulo proporcional a la "codificación" de tensiones aplicadas a sus entradas (4, 6, etc.). La posibilidad de controlar en todo momento esta codificación permite realizar desplazamientos angulares lo suficientemente precisos, dependiendo el ángulo de paso (o resolución angular) del tipo de motor (puede ser tan pequeño como 1,80º hasta unos 15º).
Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien totalmente libres. Si una o más de sus bobinas están energizadas, el motor estará enclavado en la posición correspondiente y por el contrario quedará completamente libre si no circula corriente por ninguna de sus bobinas.
Principio de funcionamiento del motor paso a paso (Bipolar).
Básicamente estos motores están constituidos normalmente por un rotor sobre el que van aplicados distintos imanes permanentes y por un cierto número de bobinas excitadoras bobinadas en su estator. Las bobinas son parte del estator y el rotor es un imán permanente. Toda la conmutación (o excitación de las bobinas) deber ser externamente manejada por un controlador.

Imagen del rotor
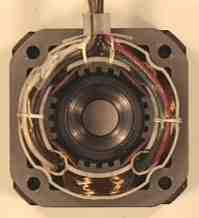
Imagen de un estator de 4 bobinas
Entonces el motor paso a paso dependiendo de los impulsos electromagnéticos que reciba, este hará mover al brazo robot un cierto ángulo de giro.
.
Descripción de las partes de la cinta transportadora.
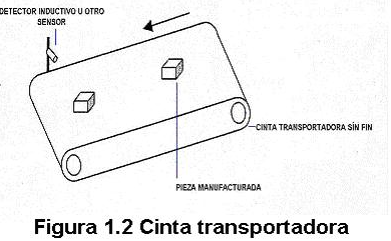
La cinta transportadora empleada en este sistema, es del tipo sin fin y el material empleado para la fabricación de esta sería de goma. La velocidad de la cinta transportadora estaría regulada para que le diera tiempo al brazo del robot industrial a coger una pieza y hacer su respectivo recorrido con ella.
Al extremo de la cinta transportadora se encuentra un detector inductivo (u otro sensor) que es el encargado de detectar la pieza metálica y mandar la señal eléctrica mediante un circuito electrónico al brazo del robot industrial y este hacer su misión.
.
ESTUDIO DE ALTERNATIVAS.
Ahora voy a explicar tres alternativas sobre el dispositivo que permita determinar la posición de la pieza.
1ª alternativa:
Pondría una célula fotoeléctrica con el sistema de barrera. El rayo infrarrojo cruzaría la cinta transportadora, situando el emisor a un lado de la cinta y el receptor al otro, justo en el lugar donde se desea recoger la pieza. Así, cuando la pieza pasara entre el emisor y el receptor e interrumpiera el rayo infrarrojo (no llega el rayo al receptor), la célula enviaría una señal al circuito para que el brazo se activase y recogiese la pieza.
Creo que esta propuesta es la más adecuada, ya que en caso de que la pieza estuviera desplazada hacia un lado de la cinta, la célula fotoeléctrica la detectaría igualmente gracias a su sistema de barrera. Además su distancia máxima de detección puede llegar hasta los 200 m. Por tanto este sistema garantiza la detección de la pieza esté donde esté.
2ª alternativa:
Otra posibilidad sería poner un transductor inductivo o capacitivo (dependiendo del material de la pieza a recoger) a un lado de la cinta transportadora. Cuando la pieza pasase por delante del transductor, el campo magnético o eléctrico (según el transductor) de éste sería perturbado y mandaría una señal al circuito para que el brazo recogiese la pieza en ese lugar.
Esta alternativa es más económica y simple que la anterior, pero tiene el inconveniente de que estos transductores detectan a una distancia máxima de 4 cm., por lo que si la pieza va un poco desplazada hacia un lado de la cinta, se corre el riesgo de no ser detectada.
3ª alternativa:
Y la última alternativa sería poner un final de carrera en el extremo de la cinta transportadora, y este final de carrera tendría una lámina fina en la que al tocar la pieza sobre ella, el final de carrera mediante un circuito electrónico enviaría una señal al brazo del robot y este cogería dicha pieza y la llevaría hacia el otro lado.
Yo creo que esta alternativa es la peor porque con el tiempo se desgastaría y la lámina debería ser bastante larga para abarcar toda la cinta transportadora.
.
CUESTIONES.
1ª. Cuestión:
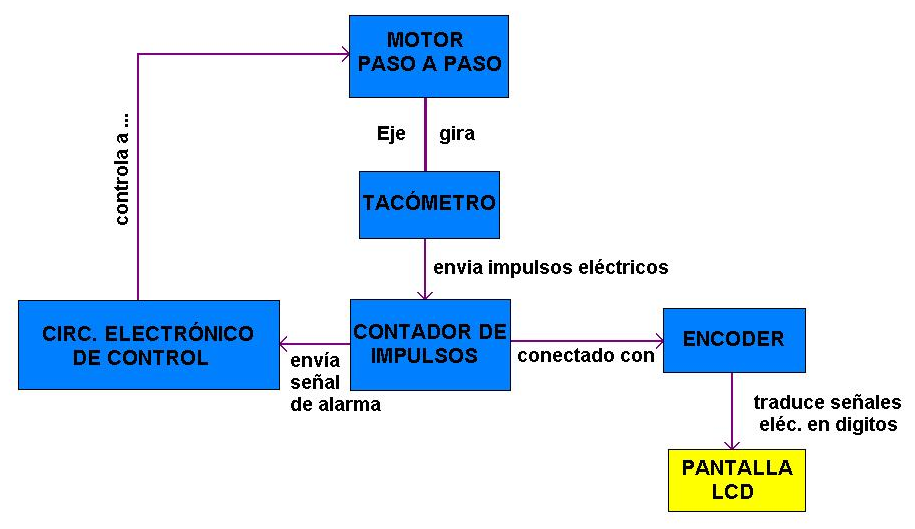
Para realizar el control de posicionamiento del brazo del robot industrial utilizaría un encoder-tacómetro.
Este aparato consta de unas escobillas que están en contacto con el eje del motor y conectadas a un voltímetro mediante cable, y un par de imanes permanentes situados a ambos lados del eje. Al girar el eje dentro del campo magnético creado por los imanes, se induce una corriente en el eje del motor, la cual es llevada al voltímetro por medio de las escobillas. Otro aparato conectado al voltímetro nos podría mostrar visualmente las revoluciones por minuto a las que gira el motor en función de la tensión producida.
Si además queremos saber la posición del robot, basta con poner un contador de impulsos (cada impulso es una revolución del eje del motor) que, como su nombre indica, iría contando el número de vueltas que da el eje del motor, tanto si el motor gira en un sentido o en otro (el aparato te indica en qué sentido está girando en cada momento). Además en este aparato podemos predeterminar al cabo de cuantos impulsos queremos que pare el motor, estableciendo así posiciones límite para el brazo. Entonces con un encoder nos descodificaría el número de impulsos y su variación y, además, el máximo de impulsos que hemos predeterminado en dígitos. Y por último, mediante una pantalla LCD el usuario vería el número de impulso y así deduciría la posición del brazo.
2ª. Cuestión:
La diferencia sería que realizando el control en lazo abierto la salida no tendría efecto sobre la acción de control. Y realizando el control en lazo cerrado habría una realimentación de la señal de salida, o dicho de otra forma, la señal tendría efecto sobre la señal de entrada.
Descargar
| Enviado por: | Toni |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.