Ciencias Ambientales
Sistemas de información geográfica
SISTEMAS DE INFORMACIÓN GEOGRÁFICA
Tema 1. Introducción: Principios de Cartografía.
1. Topografía
Estudia el conjunto de principios y procedimientos que tienen por objeto la representación gráfica de una parte de la superficie terrestre, con sus formas y detalles, tanto naturales como artificiales. La representación sobre un plano se limita a una pequeña extensión en la que puede considerarse la Tierra plana (en ellas se confunde prácticamente el plano tangente trazado en el centro de las mismas con la superficie de la esfera terrestre).
Existen numerosos tipos y mapas, diferenciándose entre si por la naturaleza de la información que contienen, la simbología, el fin al que se destinan, la escala adoptada, etc.
Un mapa topográfico es la representación plana de una parte concreta de la superficie terrestre. Dos elementos en la compasión de un mapa topográfico:
Altimetría: representación de este relieve.
Planimetría: parte de la Topografía que estudia el conjunto de métodos y procedimientos que tienden a conseguir la representación la representación a escala de la superficie terrestre en un plano.
Altimetría. La representación del relieve.
Hasta que no existiesen datos posicionales y altimétricos exactos no puede considerarse una representación correcta del territorio. Presentan el problema de la representación de las tres dimensiones en un plano.
-
Condiciones opuestas: la técnica visual más efectiva es la menos métrica y la más métrica es la menos efectiva visualmente.
Métodos de para representar la superficie de la Tierra
a) Normales
-
Son líneas cortas y finas dispuestas una junto a otra en hileras más o menos paralelas.
-
Cada normal se sitúa en la dirección de máxima pendiente y representa la dirección que seguirá el agua descendiendo por la superficie.
-
Fue inventado por J.G. Lehman y muy utilizado en los mapas militares europeos durante el siglo XIX. La inclinación de una ladera viene indicada por el grosor de la normal.
-
Como las normales no indican la elevación de la superficie es necesario indicar las alturas de las colinas, carreteras, etc. mediante puntos estratégicos o cotas.
b) Sombreado o sombreado hipsométrico
-
El efecto del relieve de la superficie terrestre se consigue con tonos grises o pardos aplicados de acuerdo con el método de iluminación oblicua.
-
Los rayos de luz provienen de un punto del NO del firmamento.
-
Todas las laderas de cara al SE reciben las sombras más intensas y son más oscuras donde la ladera es más escarpada.
-
Técnica: con normales, acuarela, etc.
-
Manual o automática.
c) Tintas hipsométricas
-
Consiste en asignar un color a todas las zonas del mapa que corresponden a una altura específica.
-
Los mapas de los atlas y los mapas murales representan generalmente zonas bajas en verde, zonas de altitudes medias en ocre o pardo y las zonas de alta montaña en marrón, rojo o violeta.
-
Este método es efectivo para aquellos que se observen de lejos.
d) Método estereográfico
-
Es una combinación de tintas, curvas de nivel y sombreado oblicuo.
-
Se emplean zonas de montaña para evitar el exceso de curvas de nivel.
e) Curvas de nivel
Es el sistema más métrico: da información exacta sobre las verdaderas altitudes e inclinaciones. Las curvas de nivel o isohipsas son los trazos resultantes de la intersección de superficies paralelas, regularmente espaciadas y horizontales, con la superficie terrestre tridimensional, y de la proyección ortogonal de dichos trazos sobre la superficie del mapa.
-
Equidistancia entre las curvas de nivel:
-
Distancia vertical que separa curvas consecutivas.
-
La equidistancia es constante a lo largo de todo el mapa, excepto en casos especiales en que se utilizan dos o más.
-
La separación horizontal de las curvas varía con los cambios de pendiente de la zona.
-
La selección de la equidistancia depende del relieve del terreno: mayor energía del relieve = equidistancia 10, 20 ó 50 metros; relieve moderado = 2 ó 5 metros. También de la escala del mapa.
-
Tipos de curvas:
1. Maestras:
-
Trazo más grueso.
-
Facilitan la lectura del mapa.
-
Intervalo regular.
-
Llevan rotulada la altura correspondiente.
2. Intermedias:
-
Aquellas que se sitúan entre las maestras.
-
Están espaciadas por el intervalo básico o equidistancia.
-
Grosor menor.
3. Intercaladas:
-
Curvas suplementarias que no guardan la equidistancia normal y por lo tanto deben ir acotadas.
-
Van en trazo discontinuo o punteado.
4. De depresiones:
-
Lo normal son curvas cerradas en el interior de otra que es de mayor altura.
-
En este caso se expresa con trazos en ángulo recto sobre el lateral interior de la línea cerrada.
5. Superpuestas:
-
Accidentes verticales o casi verticales.
-
Acantilados, desmontes, terraplenes, etc.
-
Color de las curvas de nivel
-
Topografía: sepia.
-
Glaciar: azul.
-
Batimetría: azul.
-
Propiedades de las curvas de nivel
-
Todas siempre llegan a cerrarse. No pueden quedar interrumpidas súbitamente, pues representan una superficie topográfica continua.
-
En principio cualquier curva es más alta que la que la circunscribe. La excepción son las depresiones cerradas, donde la curva interior es más baja.
-
Las curvas no pueden cortarse nunca ya que representan planos paralelos a distintas alturas.
-
La separación de las curvas aumenta en sentido inverso a la pendiente. En zonas llanas están muy separadas, pero a medida que aumenta la pendiente disminuye su separación. En el caso de una pared vertical con viene emplear un símbolo.
-
Métodos auxiliares a las curvas de nivel
-
Puntos acotados: acotaciones en puntos característicos que no quedarían bien definidos solo por las curvas, como cimas, puestos, etc.
-
Interés de los mapas de curvas de nivel
-
Definen las formas del relieve.
-
Se emplean en todos los trabajos.
2. Análisis del relieve. Su representación en mapas
La Morfografía trata los aspectos geométricos, topológicos y fisiográficos del relieve. Agrupa el conjunto de técnicas, procedimientos y métodos utilizados para determinar atributos configuracionales del relieve y en base a ellos conocer el sistema de relaciones espaciales que caracterizan a las formas del terreno. Engloba a la Morfometría y la Fisiografía.
a) La Morfometría
Parámetros espaciales con categoría geométrica (topología, dimensiones y procedimientos matemáticos). El análisis morfométrico se basa en la pendiente del terreno. Se trata de aislar formas del terreno, lo que implica, detectar cambios y rupturas en la inclinación. Como resultado aparecen:
-
Mapas de pendientes y contornos de formas.
-
Histogramas superficie-altura.
-
Desarrollo y trazado de superficies, etc.
La pendiente
-
En tanto se da como un valor, un a escala o una categoría.
-
Análisis del perfil del terreno definiendo segmentos: tipos (rectilíneo, cóncavo o convexo), cambios y rupturas (perfil topográfico).
-
Análisis bidimensional (separar superficies). Tipos de superficies:
-
Regular o rectilínea: la inclinación sobre la horizontal es constante.
-
Convexa: su inclinación aumenta constantemente desde la parte alta hacia la baja.
-
Cóncava: su inclinación disminuye hacia la base. Las tangentes van formando ángulos cada vez más pequeños hacia abajo.
La base de la cartografía morfométrica son los mapas de pendiente, contrastes del relieve y su energía.
b) La Fisiografía
Su objeto es establecer aquellas relaciones espaciales que afectan a alas formas, es decir, las debidas a su localización sobre la superficie terrestre.
Tema 2. Escalas, coordenadas y proyecciones.
La Planimetría es el arte de concebir, trazar y componer mapas. Parte de la topografía que estudia el conjunto de métodos y procedimientos para conseguir la representación a escala en un plano. Un mapa es la representación reducida y en una superficie plana de una parte de la superficie terrestre. Hay que tener en cuenta:
-
Elección de la escala.
-
Representación sobre un plano de la superficie terrestre: proyecciones.
2.1. Escala de los mapas
La escala es la reducción existente entre una distancia cualquiera medida sobre el mapa y la correspondiente distancia medida sobre el terreno. Hay varios métodos de expresar la escala:
-
Literal: expresión del número de veces que se ha hecho la reducción (un centímetro por kilómetro, etc.).
-
Numérica: número fraccionario. El numerador expresa la medida tomada en el mapa y el denominador el número de veces que se aumenta en el campo. Suele escribirse como 1:e ó 1/e.
-
Gráfica: representación geométrica de una escala numérica. Segmento dividido en una serie de partes iguales. Presenta ventajas respecto a las anteriores:
-
Permite leer directamente las distancias del mapa.
-
Evita los cálculos del cambio de escala.
Clasificación de los mapas según la escala
-
Mapas a gran escala: >1:10.000.
-
Mapas a escala media: de 1:50.000 a 100.000.
-
Mapas de pequeña escala: >1:100.000.
Proyecciones
La forma de la Tierra se define de geoide: una superficie equipotencial, en la que la dirección de la gravedad es perpendicular en todos los lugares:
-
Presenta protuberancias que difieren de la uniformidad media (pueden llegar hasta los 60 metros) = es irregular.
-
Deformado también por la rotación = achatamiento en las regiones polares.
-
La diferencia entre radios es de 21.5 km.
2.2. Sistemas de coordenadas
La localización de un punto respecto a otro necesita la utilización de dos conceptos:
-
Dirección.
-
Distancia.
En la antigüedad se utilizaba la dirección de salida y puesta de sol, adelante-atrás, izquierda-derecha. Actualmente se utilizan dos sistemas:
Coordenadas geográficas que utiliza longitud y latitud.
Coordenadas rectangulares planas.
2.2.1. Coordenadas geográficas
-
Círculo mayor: mayor círculo que puede trazarse en una esfera.
-
Círculo menor: planos que cortan la esfera sin atravesar su centro.
-
Siempre que un plano pasa por el centro determina un círculo máximo.
-
Sobre una esfera pueden trazarse infinitos círculos máximos.
-
Por dos puntos sólo puede trazarse un círculo máximo.
-
Un arco de círculo máximo es la distancia más corta entro dos puntos de la superficie de la esfera.
Meridianos y paralelos
El movimiento de rotación de la Tierra proporciona dos puntos naturales: los polos sobre los que está basada la red geográfica.
El conjunto de líneas trazados de N a S que unen los polos son los meridianos, y el conjunto de líneas trazados de E a O paralelas al Ecuador son los paralelos.
-
Meridianos: semicírculos máximos cuyos extremos coinciden con el polo N-S. Es la mitad de un círculo máximo, es decir 180º.
-
Todos siguen direcciones N-S.
-
Tienen su máxima separación en el ecuador y convergen hacia un punto del polo.
-
Pueden trazarse infinitos meridianos. Sobre mapas se representan meridianos seleccionados y equidistantes.
-
Paralelos: círculos menores completos formados por planos paralelos al ecuador.
-
Siempre son paralelos entre ellos. Mantienen una separación constante.
-
Cortan a los meridianos formando ángulos rectos excepto en los polos.
-
Todos los paralelos excepto el ecuador, son círculos menores completos. El ecuador es el único círculo máximo.
-
Pueden trazarse infinitos paralelos. Cualquier punto excepto el polo N y S están sobre un paralelo.
Longitud-Latitud
La localización de un punto sobre la superficie terrestre se mide en longitudes de arco a lo largo de meridianos y paralelos.
-
Longitud: arco de paralelo medido en grados entre ese lugar y el meridiano principal. El meridiano de origen es el dado por el Antiguo Observatorio de Greeenwich (0º de longitud).
-
Latitud: es el arco de meridano medido en grados entre ese lugar y el ecuador. Oscila entre 0º (el ecuador) y 90º N y S (en los polos).
Las coordenadas geográficas son la medición angular de distancias y direcciones expresadas en grados, minutos y segundos. Útil en grandes superficies y sus fórmulas son más sencillas que la geometría esférica.
2.2.2. Coordenadas rectangulares
El plano es dividido en una cuadrícula mediante un número infinito de líneas separadas por espacios iguales, paralelas a cada eje. La referencia de cualquier punto se realiza respecto a un punto origen. La utilización del sistema de cuadrículas es universal.
Procedimiento
-
Se transforma la superficie esférica en un plano (proyecciones cartográficas).
-
Superposición de una cuadrícula de coordenadas rectangulares planas.
-
Sólo la parte positiva.
-
La lectura es igual que sobre un papel cuadriculado (xy).
-
La referencia se expresa como un conjunto igual de números seguidos (la primera mitad es la abcisa y la segunda la ordenada).
-
Presenta mayor precisión debido a que se añade un dígito (cuadrado de 10 metros).
Los mapas topográficos utilizan uno o más sistemas de coordenadas:
1. Sistemas UTM (Universal Transversal Mercator)
Es la superficie terrestre comprendida entre la latitud 84ºN y 80ºS:
-
Columnas N-S de 6º de longitud = zonas.
-
Cada columna dividida en cuadriláteros de 8º de longitud.
-
Cada cuadrilátero dividido en cuadrados de 100km. Presenta dos letras (desde el ecuador y el meridiano de 180º):
-
Dos letras: A-Z sobre el ecuador.
-
Estrechamiento con la latitud.
-
Dos letras de AaV.
-
Mínimo cuadrado de 1 km (1:50.000).
Los tipos de proyecciones asociados a este sistema de coordenadas son la Transversal Mercator y Cónica conforme de LAmbert.
2. Sistema UPS (utilizado en zonas polares)
-
Cada zona polar dividida en dos mitades por el meridiano 0-180º.
-
Letras Y-Z (Oeste-Este)-H Norte.
-
Letras A-B (Oeste-Este)-H Sur.
-
Se dividen en cuadrados de 100 km.
El tipo de proyección asociado a este sistema de coordenadas es la Estereográfica centrada en el polo.
2.3. Proyecciones
Son una red ordenada de meridianos y paralelos utilizada como base para representar la superficie terrestre sobre una superficie plana. El problema es trasladar una red esférica a una superficie plana.
Existen más de 200 sistemas de proyección aunque sólo se emplean 30. Todos se basan en expresar las coordenadas geográficas (longitud y latitud) del elipsoide mediante una función. No hay ningún sistema de proyección que permita representar con fidelidad y a la vez superficies, distancias y ángulos. Según la propiedad conservada en el mapa distinguimos dos tipos de proyecciones:
-
Conforme: mantiene la forma real. No tiene deformación angular (los meridianos y paralelos se cortan perpendicularmente).
-
Equivalente: respeta la relación entre superficies. Importante para la representación espacial de un fenómeno.
No ha ninguna proyección conforme y equivalente a la vez.
Proyecciones sobre un plano
-
Posiciones:
-
Polar: el centro de la proyección coincide con el Polo N o S.
-
Ecuatorial: el centro está en un punto del ecuador.
-
Oblicua: el centreo está en cualquier punto intermedio entre el ecuador y los polos.
-
Tipos:
-
Ortográfica: obtenida desde un punto de origen situado en el infinito.
-
Estereográfica: un punto de origen en el lugar opuesto al contacto del plano con la esfera.
-
Gnómica: punto de proyección en el centro de la Tierra.
Proyecciones cónicas
Transfieren la red de coordenadas a un cono tangente o secante al elipsoide y desarrollan después éste en un plano.
-
Características:
-
Los meridianos son líneas rectas que convergen en un punto: polo N o S.
-
Los paralelos son arcos de círculos concéntricos cuyo radio depende de la latitud.
-
Nunca representa el globo completo.
-
Tipos:
-
Cónica simple: equidistante con distorsión en la escala.
-
Cónica de Lambert: conforme. Importante en EEUU. Utiliza los paralelos 33 y 45 como paralelos de referencia. En españa se usa el elipsoide Struve y como referencia la intersección del Meridiano de Madrid con el paralelo 40.
-
Sinusoidal de Sanson-Flamsteed: equivalente. Emplea curvas sinusoidales. Representa bien las latitudes altas.
-
Homolográfica de Mollweille: equivalente. Emplea elipses. Ha servido para realizar mapas de África, no para regiones polares.
Proyecciones cilíndricas
Transfieren las coordenadas geográficas a un cilindro tangente o secante a la esfera y desarrollan esta a continuación.
-
Características:
-
Los meridianos son líneas rectas equidistantes y perpendiculares al ecuador.
-
Los paralelos son rectas perpendiculares a los meridianos y su separación aumenta con la latitud.
-
Los polos se proyectan al infinito y no pueden ser representados.
-
Tipos:
-
Mercator: conforme. Se emplea en cartas de navegación. Cualquier línea trazada sobre el mapa en cualquier dirección es una línea de orientación constante. Gran deformación en superficies.
-
UTM.
Tema 3. Cartografía básica y temática.
3.1. Cartografía básica
1. Cartografía puntual
-
La información se refiere a puntos del territorio caracterizado por sus coordenadas.
-
Un punto (símbolo). Datos de estaciones meteorológicas, puntos de interés geológico, localización de manantiales, fauna, etc.
2. Cartografía lineal
-
La información se refiere a carreteras, red de drenaje, fracturas, elementos morfológicos determinados, etc.
3. Cartografía en malla
-
Territorio dividido en una malla.
-
Se asigna el valor al vértice o al punto medio.
-
Se elaboran mapas de densidades (se colorean).
4. Cartografía de isolíneas
-
Cada línea representa puntos de igual valor.
-
Red de puntos y luego interpolación donde no existan datos.
-
Se utilizan para representar el nivel freático, la altitud, etc.
5. Cartografía superficial
-
Zonas homogéneas respecto a un elemento estudiado.
-
Se utiliza para representar vegetación, suelos, riesgos, etc.
3.2. Cartografía temática
Los componentes del medio (geología, vegetación, clima, usos, suelos, etc.) aparecen representados en mapas de distintas generaciones.
Mapas de primera generación
Síntesis de los contenidos globales. Es el mapa Geológico Nacional: preestructura, estratigrafía, formas del terreno. Usa criterios conceptuales y genéticos y se extraen determinados datos (se seleccionan).
Mapas de segunda generación
-
Se reconvierte el de primera generación.
-
Datos relevantes (porosidad para los acuíferos).
-
Paso intermedio para agrupar datos.
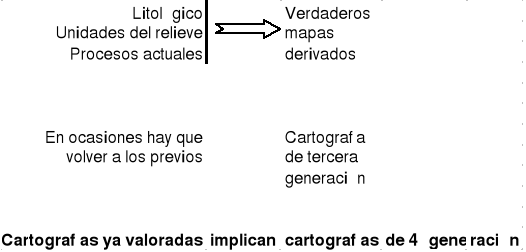
Mapas de cuarta generación y sucesivas
Son mapas de unidades ambientales, el geotécnico o referentes a acuíferos. Valoran la presencia de recursos minerales, suelo geotécnico, etc. Proporcionan además un cruce de información en relación al paisaje, puntos geológicos singulares, etc.
Todos los mapas de cuarta generación parten del mapa topográfico y utilizan:
-
Color y/o trama o sobrecarga.
-
Letras y/o números.
-
Símbolos.
Los distintos mapas resultantes son:
-
Mapa geológico 1:50.000 y 1: 200.000.
-
Mapa geomorfológico.
-
Mapa hidrológico.
-
Mapa hidrogeológico.
-
Geotécnico (hidrológico + geomorfológico + hidrogeológico + litológico).
-
Rocas industriales.
-
Metalogenético.
-
Residuos sólidos urbanos.
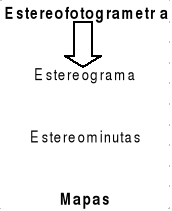
3.3. Fotografía aérea
Ha revolucionado la topografía básica y temática junto con las fotografías desde satélite (teledetección). Primero se usaba para revisar la topografía básica y actualmente es una importante fuente de información. Consta de un procedimiento:
-
Cobertura topográfica de un territorio: sucesivas tomas verticales.
-
Bandas paralelas.
-
Dirección de la foto.
-
Fotogrametría: operaciones que transmiten la confección de mapas y planos a partir de las fotos aéreas.
-
Restitución fotogramétrica: un punto por cada 2 km cuadrados e identificables en la foto (malla de restitución) que se apoya en la red geodésica y de nivelación.
3.4. Teledetección (Remote sensing)
Durante los años 60 se aplicó a cualquier medio de observación a distancia, aunque se utilizó sobre todo para la fotografía aérea. La teledetección engloba procesos que permiten obtener una imagen desde el aire o el espacio y su posterior tratamiento con técnicas de fotointerpretación clásica o digitalmente.
Los sistemas de teledetección de componen de la recepción de la energía solar reflejada por los objetos, la que ellos mismos emiten o la reflejada por un haz inducido artificialmente.
Elementos
Fuente de energía: radiación electromagnética detectada por el sensor.
Cubierta terrestre: distintas masas de vegetación, suelos, agua, construcciones humanas que reciben la señal procedente de un lugar y la reflejan o emiten de acuerdo con sus características físicas.
Sistema sensor: equipo de sensor y plataforma que los sustenta. Capta la energía, la codifica y la graba; luego la transmite o la envía directamente a las antenas receptoras.
Sistema de recepción-comercialización: recibe la información y la graba en formato adecuado. Se distribuye a los itérpretes.
Intérprete: analiza esa información convirtiéndola en clave temática.
Usuario final: analiza el documento fruto de la interpretación.
Aplicaciones
-
Actualización de la cartografía existente.
-
Usos del suelo.
-
Geología.
-
Detección de incendios forestales.
-
Apoyo a exploraciones petrolíferas y mineras.
-
Contaminación, vertidos, etc.
3.5. GPS (Global Position System)
-
Se basa en un conjunto de satélites (24) en órbita sobre la Tierra a 20.000 Km de altura.
-
Permite posicionar un punto con gran precisión.
-
Manda una señal que viaja a la velocidad de la luz.
-
Con cuatro puede calcular la latitud, longitud y altura.
Ventajas
-
Fácil desplazamiento.
-
Permite la recepción de forma continua.
-
La información puede ser convertida a un dibujo o introducida en un SIG.
Tema 4. Cartografía automática
El primer mapa digital se creó en Oxford, en 1960. La aplicación de la cartografía automática es la producción automática de mapas. En la actualidad constituyen los sistemas denominados CAD (computer assited dessins = diseño asistido por ordenador).
La información es convertida a formato digital y almacenada en un ordenador. Esta información (líneas, puntos, etc.) puede ser editada, modificada y reproducida a través de ploters o impresoras.
Ventajas
-
Modificación de errores.
-
Edición más sencilla.
-
Impresión más barata.
-
Permite los cambios de escala.
-
Tiene una sencilla codificación de los elementos que permite modificar símbolos e imprimir sólo ciertos parámetros.
No son herramientas de análisis espacial, ya que no poseen una base de datos relacionados con elementos cartográficos. Actualmente han ido adquiriendo un cierto nivel de análisis espacial gracias a los AUTOCAD.
Tema 5. Definición y objetivos. Evolución histórica y tecnológica.
5.1. Definición de sistema de información geográfica (SIG)
-
Sistema: conjunto de cosas que ordenadamente relacionadas entre si contribuyen a un determinado objeto.
-
Información: comunicación o adquisición de conocimientos que permiten ampliar o precisar los que poseen sobre una materia determinada.
-
Geográfica: perteneciente o relativo a la ciencia que trata de la descripción de la Tierra.
Existen diversas definiciones de SIG en base a su funcionalidad y capacidades:
-
Un potente conjunto de herramientas para recolectar, introducir, almacenar, recuperar a voluntad, transformar y presentar datos espaciales procedentes del mundo real para un conjunto particular de objetivos (Burrough, 1986).
-
Una tecnología de la información que almacena, analiza y presenta datos espaciales y no espaciales (Perder, 1547).
-
Un conjunto de procedimientos manuales o computerizados usado para almacenar y tratar datos referenciados geográficamente (Aronoff, 1989).
-
Una base de datos computerizada que contiene información espacial (Cebrián y Mark, 1988).
-
Un sistema de hardware, software y procedimientos diseñado para realizar la captura, almacenamiento, manipulación, análisis, modelización y presentación de datos referenciados espacialmente para la resolución de problemas complejos de planificación y gestión (NCGIA)
-
Un tipo especializado de base de datos que se caracteriza por su capacidad de manejar datos geográficos, es decir, espacialmente referenciados, los cuales se pueden representar gráficamente como imágenes (Brecken y Webster, 1990).
-
Un sistema de ayuda a la decisión que integra datos referenciados espacialmente en un contexto de resolución de problemas (Cowen)
Conclusión
Es un conjunto de herramientas de captación, almacenamiento, análisis y edición de información espacial que se estructura como un sistema gestor de base de datos georreferenciados.
Conceptos que debe incluir una definición de SIG
-
Son bases de datos computerizados.
-
Contienen información espacial.
-
Capaces de reunir, introducir, almacenar, recuperar, transformar y cartografiar datos espaciales.
-
Soporte para la toma de decisiones.
La esencia de los SIG y lo que les distingue es su capacidad de análisis, de generar nueva información de un conjunto previo de datos mediante su manipulación y reelaboración.
5.2. SIG vs. sistemas CAD
-
Relaciona los elementos gráficos (puntos, líneas y polígonos), que también maneja un CAD, con los elementos de una base de datos temática.
-
Manejan más de un conjunto de elementos gráficos al mismos tiempo y la capacidad de construir nuevos datos a partir de los ya existentes en la base de datos.
5.3. Evolución histórica y tecnológica
Sistemas manuales
-
Precursores: Geografía Cuantitativa (años 40-50).
-
Desarrollo: superposición manual y digitalización matricial.
Sistemas automáticos
-
Precursores: Canadian Geographical Information System (1964-67). Inventario y planificación del territorio y sus recursos naturales.
-
Desarrollo: consta de diversas etapas:
-
Primera etapa (Laboratorio de Harvard, 1966-70):
-
SYMAP (1968): sólo impresora de líneas. Tosco, primero en ser comercializado.
-
CALFORM (1970): se obtienen mapas en plotter.
-
GRID e IMGRID: primeros sistemas raster (representación del espacio).
-
Segunda etapa (1970-1980):
-
POLYVRT: integra la topología de objetos cartográficos.
-
Tercera etapa (1980-actualidad):
-
ODYSSEY, PIOS, ARC/INFORMACIÓN, MAP, ERDAS, etc.
Paquetes informáticos SIG
Sistemas grandes diseñados para grandes proyectos, que requieren procesar grandes cantidades de información y salidas gráficas profesionales. Existen diversos paquetes SIG:
-
Vectoriales:
-
Arc/Info de ESRI: es el más vendido en todo el mundo.
-
Geomedia Profesional de Inergraph: con numerosos módulos de aplicaciones muy diversas.
-
Genamap de Genasys.
-
Small World: orientado a objetos.
-
Raster:
-
ERDAS: sistema de procesado de imágenes más vendido.
-
ER-MAPPER.
-
PCI.
-
ENVI: muy fiable para desarrollarse y aplicaciones multiespectrales. Posee un lenguaje propio de programación denominado IDL.
-
Sistemas medios: programas de menor coste enfocados a aplicaciones puntuales.
-
MapInfo: software muy sencillo de utilizar.
-
AutocadMap: muy útil para usuarios de AUTOCAD.
-
AtlasGis.
-
GRASS: SIG desarrollado por el departamento de defensa americano y que es de doninio público.
-
IDRISI: SIG muy utilizado en docencia.
-
Visualizadores: paquetes de SIG diseñados para el análisis de la información ya procesada, no para la edición.
-
ArcView: visualizador de Arc/Info.
-
Geomedia: visualizador de Intergraph.
Tema 6. Elementos de un SIG.
6.1. Introducción
Maguire (1991): “Para que un SIG computerizado tenga vida como tal es necesario contar con cuatro elementos fundamentales: software, hardware, datos y personal cualificado”.
El software necesita de los datos ya que no nos encontramos ante un sistema de información. Un SIG no puede funcionar sin el hardware adecuado y un personal especializado, debe existir un cierto equilibrio entre ambos.
6.1.1. Software (soporte lógico)
Existe un gran número de ellos y son sistemas operativos como MS2, Windows NT worksatiton 4.0 Proffesional, Unix, Linux, etc.
-
Programas de aplicación:
-
Comerciales: ARC/INFO, MICROSTATION, SICAD, SPANS, ERDAS, SMALLWORLD, GENAMAP, ATLAS-GIS, TERRASOFT, etc.
-
Dominio público (freeware): GRASS, MOSS, ODYSSEY, etc.
-
Educacionales: IDRISI, OSU-MAP, aMAP, etc.
Pueden ser englobados en dos grandes familias en función de la manera en la que modelizan el espacio:
-
Sistemas vectoriales.
-
Sistemas raster.
6.1.2. Hardware (soporte físico)
-
Los ordenadores personales son actualmente la plataforma más utilizada.
-
También estaciones de trabajo, bajo el sistema operativo UNIX van ganando terreno debido a su mayor potencia de cálculo y a la fidelidad de las comunicaciones por red.
-
Unidad central de proceso de datos (CPU).
-
Periféricos de entrada (teclado, ratón, tabletas digitalizadoras y barredores ópticos); de almacenamiento (discos, CD-ROM, etc.) y de salida (pantalla, impresora y trazadores).
6.1.3. Datos
-
Representación simplificada del mundo real.
-
Mapas digitales.
-
Adquisición de la información (personal o en el mercado).
6.1.4. Personal
-
Especializado.
6.2. Funciones de los SIG. Clasificación
6.2.1. Entrada de datos
-
Mapas analógicos.
-
Imágenes de sensores espaciales.
-
Fotografías aéreas.
Esta información debe ser homogeneizada y corregida.
Introducción de la información espacial
-
Barrido óptico (scaners). Raster.
-
Programas de vectorialización. Mapas en formato vectorial.
-
Digitalización manual: costoso y lento.
-
Integración de la Teledetección (fotografía aérea y satélites): capas temáticas.
-
GPS: integración de datos con precisión de centímetros.
6.2.2. Gestión de datos
-
Operaciones de almacenamiento y recuperación de bases de datos.
-
Cómo se organizan los datos espaciales y temáticos en la base de datos.
6.2.3. Transformación y análisis de datos
-
Resolución de problemas espaciales concretos.
-
Función más importante: combinación, reclasificación, superposición, etc.
-
Simulaciones:
-
Escenarios virtuales para evaluar la implementación de políticas o medidas de planificación.
-
Áreas óptimas para diversos aspectos: localizaciones de instalaciones urbanas, vertederos, etc.
6.2.4. Salida de datos
-
Mapas analógicos, tablas de valores, gráficos, representaciones tridimensionales, simulaciones de vuelo sobre ciertas zonas, etc.
-
Mediante impresoras o conversores fotográficos o en monitor gráfico.
6.3. La representación digital de los datos geográficos
El mapa tradicional es una representación analógica o continua de la realidad, por lo que es necesaria su transformación a formato digital para poder introducirlo en un SIG. Para la representación digital de datos espaciales son necesarios una serie de pasos.
a) Geocodificación de los datos
El proceso de geocodificación determina la localización espacial de cada objeto geográfico:
-
De manera directa, mediante un sistema de ejes de coordenadas respecto a los que se determina la posición absoluta de cada lugar.
-
De modo indirecto, otorgando a cada objeto una referencia espacial que lo diferencia de los restantes y permite establecer su posición respecto a los demás.
b) Descripción en términos digitales de las características espaciales
-
Descripción de la posición geométrica de cada objeto y de las relaciones espaciales. La topología que mantiene con los restantes objetos geográficos existentes en la realidad.
-
Para ello se utiliza un modelo de datos que es una abstracción y simplificación de la realidad.
Existen dos maneras de representar la información espacial o modelos de datos. Son maneras simplificadas de concebir el espacio. Esta diferencia entre ambas atiende al tipo de captura de datos o información.
-
Modalidad vectorial.
-
Modalidad matricial.
6.3.1. Modalidad vectorial (Vector)
-
El espacio territorial tiene un carácter continuo.
-
Representación de los límites exteriores de los elementos geográficos (entidades).
-
Para ello se emplean objetos como puntos, líneas y polígonos.
-
Un polígono es la superficie que queda delimitada por un conjunto de líneas.
-
Las líneas quedan representadas por un conjunto de vértices.
-
Los puntos quedan representados por un par de coordenadas XY.
-
Técnica de captura de datos en forma vectorial: digitalización en mesas digitalizadoras.
6.3.2. Modalidad matricial (Raster)
-
Representación del contenido de los propios elementos geográficos.
-
El espacio se divide en una retícula formada por celdillas o teselas de forma regular, exclusivas e indivisibles.
-
Su localización se realiza mediante su posición en una matriz de filas-columnas.
-
Cada celda tiene un valor o código asignado de acuerdo con su información temática.
-
Es una colección ordenada de pixels cuyo valor es la media ponderada de la intensidad de un fenómeno sobre las correspondientes áreas del espacio real.
-
Técnica para realizar esta representación:
-
Se superpone al mapa analógico una rejilla de unidades regulares u en cada celda se registra el valor que el mapa convencional analógico adopta en la zona que recoge la celda correspondiente.
-
Técnica de captura de datos: Teledetección. Fotogrametría y scáner.
6.4. Modelo de datos vectorial
El modelo vectorial centra su interés en el posicionamiento espacial de las
entidades, lo que permite representarlas con una mayor nitidez. Las formas de representación en un modelo vectorial son tres tipos de objetos:
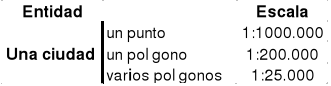
Punto (adimensional)
-
Descrito por un par de coordenadas XY.
-
Se puede representar cualquier elemento cuyas dimensiones largo-ancho sean despreciables a esa escala de trabajo: manantiales, pozos, semáforos, vértices geodésicos, etc.
Línea (unidimensional)
-
Descrita por dos o más pares de coordenadas representando los puntos que delimitan los segmentos rectos que forman la línea.
-
Se suelen representar elementos lineales que forman redes: ríos, carreteras, tendidos eléctricos, etc.
Polígono (bidimensional)
-
Descrito por cuatro o más pares de coordenadas que delimitan los segmentos rectos que sirven de límite externo al polígono (a modo de anillo).
-
El primero y último par de coordenadas deben coincidir para cerrar el polígono. Se les asigna un nombre.
-
Se suelen representar elementos areales cerrados: parcelas catastrales, formaciones vegetales, conjuntos litológicos, etc.
La escala del mapa es esencial para elegir la forma de representar la entidad:
6.5. Estructuras de datos en modelos vectoriales
6.5.1. Lista de vértices o Spaghetti
Estructura cartográfica en la que cada elemento se registra con un identificador, el número de vértices que definen su frontera y un listado con las coordenadas de cada vértice. En el caso de los polígonos se repite el primer vértice para indicar que es una figura cerrada.

Desventajas
-
No representa la topología, solo la geometría y la localización.
-
Datos duplicados (vértices).
-
Posibilidad de errores en la digitalización y en la creación de los polígonos.
6.5.2. Diccionario de vértices
-
Estructura topológica de vértices con dos elementos:
-
Una relación de vértices con sus pares de coordenadas.
-
Una tabla que indica cómo se construye cada objeto con los vértices que lo integran.
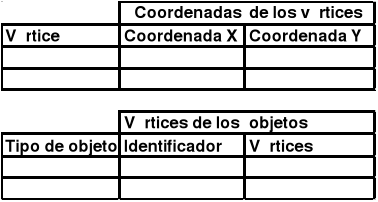
Ventajas
-
Las coordenadas de los puntos sólo aparecen reseñadas una vez.
-
Desde el punto de vista topológico es pobre, ya que resulta simple para determinados análisis.
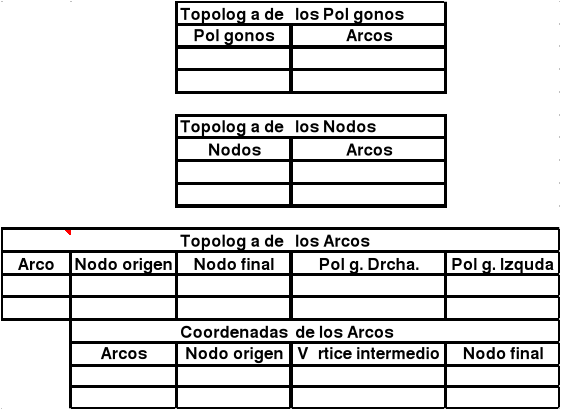
6.5.3. Arco-Nodo
-
Arco: sucesión de líneas o segmentos limitados por nodos.
-
Nodo: principio y final de un arco o punto de intersección de líneas.
-
En los nodos se encuentran por tanto tres o más arcos, excepto cuando son nodos de terminación de arcos.
-
Pseudonodo o vértice: punto donde sólo llega una línea.
Características
-
Los polígonos se codifican indicando los arcos que le rodean.
-
A su vez, los arcos se registran indicando el nodo inicial, el final, el polígono situado a su derecha y a su izquierda.
-
Finalmente se recogen en una tabla las coordenadas de los vértices y de los nodos.
-
Si existe un polígono incluido en otro, se registra en la definición del polígono envolvente el identificador del arco/s que compone el polígono incluido con signo negativo.
-
Esta estructura almacena relaciones de contigüidad, continuidad e inclusión. Por ello las operaciones de análisis de redes son muy rápidas al no tener que recurrir a la geometría.
a) Contigüidad
-
Se conoce directamente gracias a la tabla de Topología de arcos.
-
Registra en la misma línea cual es el polígono que queda a la izquierda y derecha de cada arco y por tanto, son colindantes.
b) Conectividad de arcos
-
En la misma tabla constan conexiones entre arcos y nodos.
-
Buscando en la tabla los arcos en los que aparece un determinado nodo como origen o final se puede saber qué arco está conectado a través de ese nodo.
-
En base al conocimiento de los arcos que están conectados entre sí se pueden deducir conexiones indirectas por medio del análisis de redes.
c) Inclusión
-
En la tabla de Topología de polígonos, mediante signo negativo situado antes del arco que conforma una isla dentro de un determinado polígono. Por lo que se pueden realizar operaciones de análisis espacial sin recurrir a la geometría.
6.5.4. TIN (Triangulated Irregular Network)
-
Estructura topológica basada en el modelo Arco-Nodo.
-
Integrada por una red de triángulos irregulares interconectados.
-
Se registran los pares de coordenadas de los nodos de los triángulos, su valor z (altura) y la contigüidad entre ellos.
-
Está diseñada para variables continuas como altura en los MDT.
-
Otras maneras de representar la elevación es mediante una distribución regular:
-
Puntos dispuestos regularmente en el espacio.
-
Líneas, curvas de nivel.
Inconvenientes
-
Se pueden incluir más puntos allí donde el relieve es más accidentado.
-
No se da importancia a ninguna dirección en particular debido a lo irregular de la red.
-
Se pueden recoger los puntos críticos de la superficie (cimas, líneas de ruptura, etc.).
Puntos, líneas y polígonos
-
Puntos: objetos espaciales en la base de datos en la que se almacena información sobre sus atributos. Hay varios tipos de punto:
-
Puntos entidad: representan entidades puntuales (pozo).
-
Puntos maestrales: lugares donde se han tomado muestras para recoger información sobre determinadas variables.
-
Líneas: están comprendidas entre dos vértices. Suelen ser rectas y reciben el nombre de segmento. El conjunto de segmentos recibe el nombre de arco o polilínea.
-
Polígonos: superficies cerradas por arcos. Objeto que almacena información mediante un punto situado en el interior llamado etiqueta de polígono.
-
Nodos: puntos en los que se encuentran dos o más líneas.
-
Vértices: sirven para el trazado de las líneas.
6.6. Modelo de datos matricial
-
Centra su interés en las propiedades del espacio más que en la representación precisa.
-
Compartimenta el espacio en una retícula regular compuesta por celdas.
-
Cada celda se identifica por su número de fila y columna.
-
La información temática de la celda: a cada celda le corresponde un único valor de la variable que se está representando.
-
Un elemento puntual del mundo real se representa por una celda.
-
Una línea del mundo real se representa por una secuencia de celdas alineadas.
-
Un elemento poligonal del mundo real se representa mediante una agrupación de celdas continuas.
Desventajas
-
La falta de exactitud al representar elementos:
-
Un elemento puntual está localizado en alguna parte de la celda pero no sabemos dónde.
-
Un elemento lineal atraviesa una celda por algún lugar, pero no conocemos exactamente donde.
-
Tampoco sabemos la forma y tamaño exacto de los elementos poligonales.
-
Para aumentar la exactitud debe incrementarse el nivel de resolución.
6.6.1. Principales conceptos de un SIG RASTER
-
Resolución: dimensión lineal mínima de la unidad más pequeña del espacio para la que se recogen datos.
-
Normalmente expresada por el tamaño de la celdilla.
-
Al disminuir el tamaño de la celdilla aumenta la resolución.
-
Orientación: ángulo formado por el norte geográfico y la dirección definida por las columnas de la retícula.
-
Normalmente las retículas se confeccionan para que sea 0.
-
Zona: conjunto de celdas contiguas que representan el mismo valor.
-
Clase: conjunto formado por la zona o zonas con el mismo valor en una retícula.
-
Valor: item de información almacenado en cada celda de una capa.
-
Estos números pueden ser enteros o reales, por lo que los valores alfabéticos deben ser codificados con dígitos.
-
Localización: posición de una celda, bien respecto a las demás (relativa) con las relaciones topológicas implícitas en la retícula (contigüidad, proximidad y orientación relativa), o bien respecto al sistema de coordenadas (absoluta).
6.7. Estructuras de datos en modelos matriciales
6.7.1. Simples
a) Enumeración exhaustiva
Almacena uno por uno los valores de cada una de las celdas, empezando por la esquina superior izquierda y en una secuencia fila a fila. Este orden convencional de almacenamiento puede sustituirse por el orden de greca (alternante izquierda-derecha y derecha-izquierda).
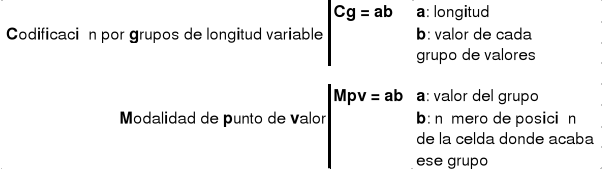
b) Codificación por grupos de longitud variable
Almacena grupos de valores iguales unos a continuación de otros formando tuplas, bien convencionalmente (pares de números de celdillas, valor) o con la modalidad de punto de valor (valor, posición del extremo del grupo); es muy útil cuando existe alta correlación espacial.
6.7.2. Jerárquicas
a) Árboles cuaternarios o Quadtrees
El almacenamiento opera en una misma capa con grupos de celdas de diferentes tamaños, o sea, de resolución variable. El resultado es una estructura arborescente en la que cada rama puede subdividirse sucesivamente en otras cuatro, de ahí su nombre; alcanza su mejor resolución cuando la variación espacial es reducida, es decir, cuando aparecen áreas extensas de una misma clase. Presenta como ventajas: una mayor velocidad de acceso a los valores temáticos de las celdas, un menor tamaño de almacenamiento, estructuras más sencillas y conocimiento inmediato de la resolución del mapa.
6.8. Comparación de los modelos Raster y Vector
6.8.1. Modelo Matricial
-
Ventajas:
-
Estructura de datos simple.
-
Operaciones de superposición de mapas rápidas y eficientes.
-
Eficiencia de representación para variación espacial de los datos.
-
Eficiente tratamiento y realce de imágenes digitales.
-
Desventajas:
-
Estructura poco compacta, por lo que genera ficheros muy grandes.
-
Dificultad de establecer relaciones topológicas.
-
Salida de gráfico poco estética al tener aspecto de bloques si la resolución no es muy alta.
6.8.2. Modelo Vectorial
-
Ventajas:
-
Estructura de datos más compacta.
-
Codificación eficiente de la topología, lo que permite el análisis de redes.
-
Salildas gráficas más ajustadas a la realidad.
-
Desventajas:
-
Estructura muy compleja.
-
Labores de edición más complicadas.
-
Operaciones de superposición de mapas difíciles de interpretar.
-
Poco eficiente para una variación espacial de datos elevada.
-
No diseñada para el tratamiento de imágenes.
Descargar
| Enviado por: | Marta Garcia Pulgar |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.