Matemáticas
Sistemas de ecuaciones
Pregunta 14:
Resolver una ecuación diferencial con cualquier tipo de método lleva implícito como primer problema, definirse una buena condición de borde cuando no son datos conocidos, aún mas cuando se pretende obtener una aproximación polinomial spline de una sección tabulada de datos.
Para nuestro caso las condiciones son las siguientes:
-

, para z = 0 y z = 27.2, es decir la primera derivada de la temperatura con respecto a la profundidad. Esto se debe a que en transferencia de calor las zonas con gradientes cero de temperatura en una variable se consideran como térmicamente aisladas o son puntos donde se genera calor como es el caso de la superficie z = 0.
-

, para z = 0 y z = 27.2, la segunda derivada evaluada en los puntos extremos y de interés es cero. Este supuesto se establece para asegurar continuidad a la solución spline de la ecuación diferencial.
Según el desarrollo planteado en la tarea, construir una función spline requiere conocer la segunda derivada del los puntos tabulados y que se encuentran resolviendo el siguiente sistema lineal.
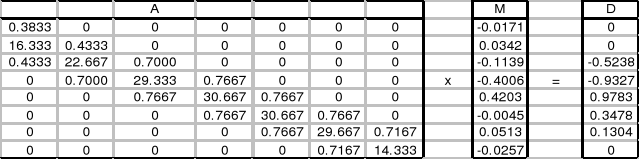
En la tabla anterior se encuentran los elementos del sistema: La matriz A es una matriz tridiagonal simétrica característica de la matriz resolutiva de funciones spline, el vector columna D y por último la el vector columna M contiene los valores que satisfacen la ecuación.
Como se entenderá la solución del sistema anterior la realizamos directamente calculando la inversa de la matriz A para multiplicarlo por el vector columna D, es decir,
![]()
Luego de obtener los coeficientes M para la función spline que interpole los datos de la tabla construiremos un algoritmo matemático apoyado con herramientas computacionales para obtener una muestra representativa de puntos, y construir un gráfico de la temperatura en función de la profundidad, la derivada de la temperatura y la segunda derivada de la temperatura.
El algoritmo es el siguiente:
clear all;
x= [ 0 2.3 4.9 9.1 13.7 18.3 22.9 27.2];
y = [ 22.8 22.8 22.8 20.6 13.9 11.7 11.1 11.1];
h = x(2:8)-x(1:7);
hh =[h(1) h(1:6)+h(2:7) h(7)];
A = diag(hh/3)+diag(h(1:7)/6,1)+diag(h(1:7)/6,-1);
D = [(y(2)-y(1))/h(1) (y(3:8)-y(2:7))./h(2:7)-(y(2:7)-y(1:6))./h(1:6)...
-(y(8)-y(7))/h(7)];
D = D';
M = inv(A)*D;
k = 1;
for j = 1:7,
for s = x(j):0.2:x(j+1),
z(k) = (M(j)*(x(j+1)-s)^3+M(j+1)*(s-x(j))^3)/(6*h(j))+...
((x(j+1)-s)*y(j)+(s-x(j))*y(j+1))/(h(j))-...
(M(j)*(x(j+1)-s)+M(j+1)*(s-x(j)))*(h(j)/6);
xk(k) = s;
dz(k) = (-M(j)*(x(j+1)-s)^2+M(j+1)*(s-x(j))^2)/(2*h(j))+...
(-y(j)+y(j+1))/(h(j))-...
(-M(j)+M(j+1))*(h(j)/6);
ddz(k) = (M(j)*(x(j+1)-s)+M(j+1)*(s-x(j)))/(h(j));
k =k+1;
end;
end;
grid;
plot(x,y,'o',xk,z);
figure;
plot(xk,dz);
figure;
plot(xk,ddz);
danto como los siguiente resultados :
Perfil de temperatura:
A continuación enseñaremos el gráfico del perfil de temperatura versus profundidad obtenido, acompañado con una respectiva tabla con datos tabulados de puntos intermedios.
donde el gráfico anterior representa la curva spline que interpola una colección de datos representados por puntos celestes
los datos con los cuales se baso la construcción gráfico se encuentran tabulados en el anexo 1
Primer derivada de Temperatura:
El gráfico de la primera derivada de la temperatura es el siguiente y como podrá observarse, existe un mínimo en al función derivada aproximadamente por 11.2 metros de profundidad
Segunda derivada:
El gráfico de la segunda derivada es le siguiente
como puede confirmarse el plano termoclino e encuntra a 11,2 metros de profundidad aproximadamente.
Plano Termoclino:
Para encontrar el plano termoclino hay que solucionar la ecuación lineal :
![]()
, con i = 3 que es el intervalo donde ocurre el minimo de la primera derivada de T.
Dando como resultado:
El plano termoclino se encuentra a una profundidad de 11.3448044 metros
Conclusiones 14
Una buena idea para aproximar soluciones gráficas a ecuaciones diferenciales cuando se tiene algunos valores intermedios, es ocupar alguna forma de interpolación, como es en el caso de la spline cúbicas. Sin embargo no puede confiarse totalmente en métodos de interpolación para obtener soluciones. Siempre se debe tener presente que las interpolaciones spline entregan una respuesta aproximada bajo un marco de continuidad restringida. En casos muy extremos, estas aproximaciones pueden llegar a lo grosero. Por ejemplo, de la tabla de temperatura versus profundidad de la pregunta 14, debiéramos esperar un perfil de temperaturas estrictamente monótonos y decreciente, sin embargo en le segundo intervalo de interpolación la spline cúbica interpreta la curva con una leve pendiente positiva.
La interpolación resulta ser una buena herramienta de aproximación de perfiles, pues muy involucrado en su cálculo se encuentra la solución de sistemas lineales con matrices caracteristicas tridiagonales. Estas matrices presentas bondadosas propiedades de cálculo que economizan mucha operatoria, en particular cuando los sistemas exceden los 100 grados de libertad, por dar un ejemplo. Sin embargo estas soluciones se encuentran limitadas a la naturaleza de los problemas, es decir para situaciones en que la primera y segunda derivadas en los extremos de la tabla de valores no son cero, la matriz característica pierde su tridiagonalidad, estropeando muchas de las ventajas comparativas de las matrices antes mencionadas.
Pregunta 15.
Un polinomio interpolante usando diferencia retardadas es de la forma:

con ![]()

pero ![]()
y ![]()
, entonces dx = h*ds entonces reemplazando:


Luego la fórmula o el método predictor-corrector Adams-Bacshforth plantea que:

![]()
![]()
![]()
![]()
por lo tanto para entender o cuantificar el método hay que evaluar ![]()
iii)




entonces:
![]()
![]()
Observación:
![]()
Entonces para:
![]()
![]()
Conclusiones 15
Resulta importante entender como funcionan los métodos númericos para aproximar soluciones de ecuaciones diferenciales ordinarias. El método predictor corrector de Adams Bashfort la bibliografía lo define como método multipaso explicito, es decir, al determinar un nueva aproximación Yn+1 se hace en función de los anteriores Yn. Presente ventajas con respecto a los métodos de paso único por resición, aunque nos encontramos con que para mayor presición necesitada mayor operatoria requiere la rutina de cálculo.
Pero lo importancia de los métodos predictores correctores radica en definirla nueva aproximación Yn+1 como la suma del valor anterior Yn más la integral del intervalo de trabajo de alguna interpolación de los datos anteriores.
Pregunta 16:
Supongamos que tenemos una colección de puntos relacionados entre si por tres variables, y queremos trazar la mejor recta entre ellos, entonces cada punto está relacionado de la siguiente forma.
Z = a +bX+cY, donde a, b, c son constante cuyo valor debe estimarse.
Ahora si lanzáramos una línea recta en error de ubicación que corresponde a la distancia entre la línea y el punto lo podemos expresar como.
e = Z-a-bX-cY
ahora si acumularemos el error al cuadrado
![]()
La recta más representativa es aquella que minimiza el error, para ello calcularemos la derivada de E en función de a,b,c y buscaremos el mínimo
![]()
entonces esto es como,
![]()
y de la misma manera se calculan las derivadas parciales de E con respecto a b , c dando como resultado,
![]()
para el caso de ![]()
además de
![]()
para el caso de ![]()
luego tenemos un sistema lineal con una matriz característica de dimensión tres, que puede expresarse de la siguiente forma.

ahora podemos relacionar el anterior sistema de ecuaciones con el siguiente modelo,
ln(Q) = ln(a0)+a1*ln(D)+a2*ln(S)
donde ln(Q) = Z,
ln(D) = X,
ln(S) = Y,
son las equivalencias entre el sistema de ecuaciones y el modelo propuesto en la tarea,
además las constante solución del sistema se reemplazan como:
ln(a0) = a
a1 = b
a2 = c
entonces el sistema de ecuaciones se reescirbe:

donde A es la matriz del sistema, w es el vector columna con las soluciones que fueron calculadas directamente, de la siguiente forma:
w = inv(A)*d
ralizando la comprobación tenemos que
E = A*w-d = (-4.440892098500626e-016 0 0)t
= (a b c)t
por lo tanto podemos calcular los coeficientes a0, a1, a2 que son los siguientes:
| A0 | 5.597189400845032e+001 |
| A1 | 2.615843931140002e+000 |
| A2 | 5.367798685817587e-001 |
Obs: todas las operaciones matemáticas fueron resguardas en la siguiente rutina de cálculo.
clear all;
Q = [1.4 8.3 24.2 4.7 28.9 84.0 11.1 69 200];
S = [0.001 0.001 0.001 0.01 0.01 0.01 0.05 0.05 0.05];
D = [1 2 3 1 2 3 1 2 3];
z = log(Q);
x = log(D);
y = log(S);
A = [1 mean(x) mean(y); mean(y) mean(x.*y) mean(y.*y);
mean(x) mean(x.*x) mean(x.*y)];
b = [mean(z) mean(z.*y) mean(x.*z)]';
w = inv(A)*b;
E = A*w-b;
w = w';
a0 = exp(w(1));
a1 = w(2);
a2 = w(3);
conclusiones 16
Del presente problema podemos destacar lo siguiente, La construcción de regresiones lineales multivariadas puede simplificarse significativamete ocupando conjuntamente sistemas lineales y conceptos básicos de estadística como el de la media. De ésta forma podemos modelar cualquier tipo de fenómenos sólo limitado por la estabilidad numérica de este.
Con respecto de los sistemas lineales debemos recordar que para pequeñas dimensiones siempre es recomendables ocupar métodos directos de solución.
Descargar
| Enviado por: | Cristian Neira |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.