Industria y Materiales
Robótica industrial
INTRODUCCIÓN A LA ROBOTICA INDUSTRIAL
Cuando escuchamos la palabra Robot, en algunas ocasiones pensamos en esas películas que nos han sorprendido por presentarnos Robots que realizan acciones superiores a las capacidades del ser humano. Quizás los modelos más famosos de robots han sido los creados por George Lucas en su película Stars Wars a quienes conocimos como C3PO y R2D2, y otros como Robocop.
Sin embargo, la idea que nos presentan las películas se encuentra bastante alejada de la aplicación industrial de los robots, a los cuales se les considera como un tipo de máquinas-herramientas.
El siglo XVIII constituye la época del nacimiento de la robótica industrial. Hace ya más de doscientos años se construyeron unas muñecas mecánicas, del tamaño de un ser humano, que ejecutaban piezas musicales.
Sin duda, hoy se puede afirmar que el desarrollo de las máquinas-herramientas ha sido sumamente acelerado. El concepto actual de robot industrial no se aplica a aquellas antiguas muñecas sino a lo que aquí aprenderemos es un robot industrial.
Definición :
Mikell Groover, en su libro Automation, Production Systems and Computer Integrated Manufacturing, define al robot industrial como
"...una máquina programable, de propósito general, que posee ciertas características antropomórficas, es decir, con características basadas en la figura humana..."
Cabe destacar que la característica antropomórfica más común en nuestros días es la de un brazo mecánico, el cual realiza diversas tareas industriales. Existen en el mercado diversas empresas dedicadas a la fabricación de robots industriales por lo que existen diferentes marcas y modelos. Estos últimos son normalmente asignados para identificarlos o de acuerdo a su función.
| En el caso de los robots a analizar en esta monografía se encuentra la marca Amatrol modelo Júpiter. | La marca Mitsubishi modelo Move Master Ex. | ||
| La marca Unimate, modelo Puma, éste último dado como abreviación de Programable Universal Machine for Assembly |
| Robot utilizado dentro de los sistemas de almacenamiento (AS/RS) marca Amatrol |
|
Para acercarnos más al estudio de los robots, identificaremos sus componentes.
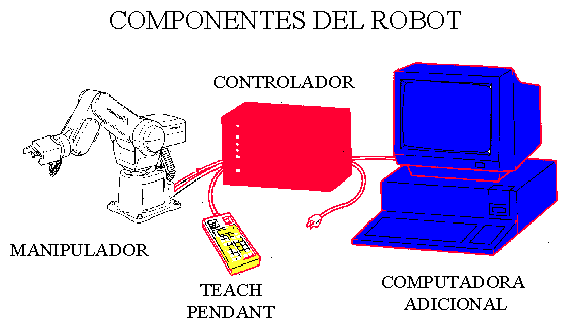
Componentes
El componente principal lo constituye el manipulador, el cual consta de varias articulaciones y sus elementos.
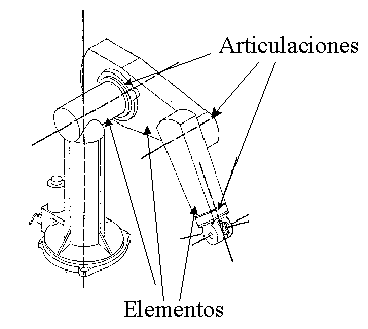
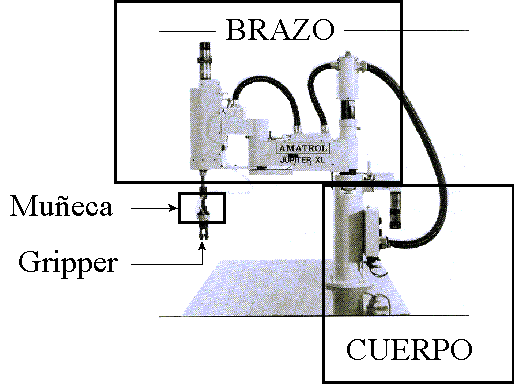
Las partes que conforman el manipulador reciben los nombres de: cuerpo, brazo, muñeca y efector final. Al efector final se le conoce comúnmente como sujetador o gripper.
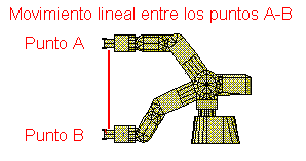
En este trabajo voy a centrar mi atención en los elementos de las articulaciones. Cada articulación provee al robot de al menos un "grado de libertad". En otras palabras, las articulaciones permiten al manipulador realizar movimientos:
-
Lineales que pueden ser horizontales o verticales.
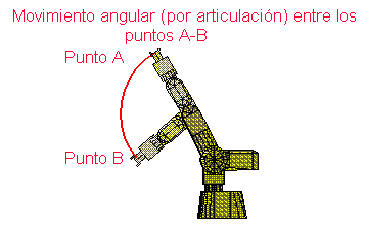
-
Por articulación
(En los dos casos la línea roja representa la trayectoria seguida por el movimiento del robot).
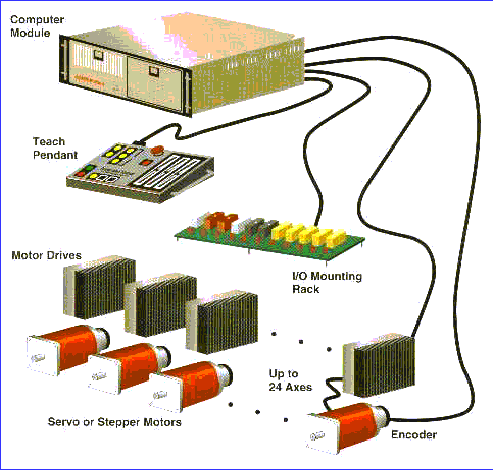
Además del manipulador, los otros elementos que forman parte del robot son un controlador, mecanismos de entrada y salida de datos y dispositivos especiales. El controlador del robot, como su nombre lo indica, es el que controla cada uno de los movimientos del manipulador y guarda sus posiciones. El controlador recibe y envía señales a otras máquinas-herramientas (por medio de señales de entrada/salida) y almacena programas. Los mecanismos de entrada y salida, más comunes son: teclado, monitor y caja de comandos llamada "teach pendant". En el dibujo anterior tenemos un controlador (computer module) que envía señales a los motores de cada uno de los ejes del robot, la caja de comandos ("teach pendant") la cual sirve para enseñarle las posiciones al manipulador del robot.
La siguiente figura muestra un "teach pendat" para un tipo de robot industrial.
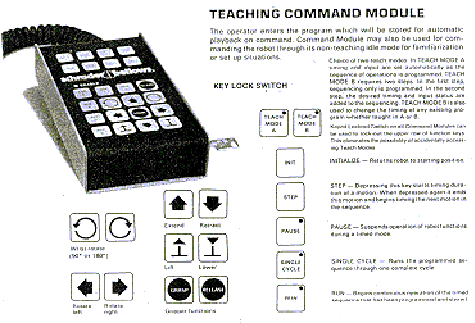
Los dispositivos de entrada y salida permiten introducir y, a su vez, ver los datos del controlador
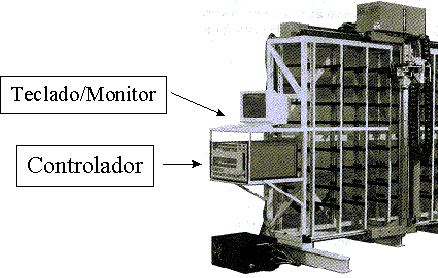
Para mandar instrucciones al controlador y para dar de alta programas de control, comúnmente se utiliza una computadora adicional. Es necesario aclarar que algunos robots únicamente poseen uno de estos componentes. En estos casos, uno de los componentes de entrada y salida permite la realización de todas las funciones.
Esto lo podemos ver en el robot Júpiter, el cual se puede programar utilizando el "teach pendant". En el caso del robot del AS/RS, éste se puede programar y enseñar sus posiciones a través de un teclado y monitor conectado directamente al controlador.
En otros casos, es indispensable conectar una computadora al controlador del robot.
Ejemplo de ello es el robot Move Master (Mitsubishi), el cual requiere una computadora externa para realizar y cargar los programas del controlador.
Señales de entrada y salida
Las señales de entrada y salida se obtienen mediante tarjetas electrónicas instaladas en el controlador del robot las cuales le permiten tener comunicación con otras máquinas-herramientas. En manufactura, por ejemplo, se utilizan estas tarjetas para comunicar al robot PUMA con las máquinas de control numérico (torno y centro de maquinado, por ejemplo). Estas tarjetas se componen de relevadores los cuales mandan señales eléctricas que después son interpretadas en un programa de control, estas señales nos permiten controlar cuando debe entrar el robot a cargar una pieza a la máquina, cuando debe empezar a funcionar la máquina o el robot, etc.

Posicionamientos del Move Master EX

Paso ahora a los dispositivos especiales. Entre los dispositivos especiales se encuentran los ejes que facilitan el movimiento transversal del manipulador y las estaciones de ensamble, que son utilizadas para sujetar las distintas piezas de trabajo.
En la estación del robot Move Master EX (Mitsubishi) se pueden encontrar los siguientes dispositivos especiales:
Estación de posición sobre el transportador para la carga/descarga de piezas de trabajo.
Eje transversal para aumentar el volumen de trabajo del robot.
Estación de inspección por computadora integrada con el robot.
Estación de ensamble.
Con todos estos dispositivos el robot cuenta con señales de entrada/salida para poder realizar la integración de su función incorporando estos elementos.
Efector final (gripper)
El efector final (griper) es un dispositivo que se une a la muñeca del brazo del robot con la finalidad de activarlo para la realización de una tarea específica. La razón por la que existen distintos tipos de efectores finales es, precisamente, por las funciones que realizan. Los diversos tipos podemos dividirlos en dos grandes categorías: pinzas y herramientas.
Las pinzas han sido diseñadas para que el robot cargue y descargue objetos, transporte material y ensamble piezas.

Los tipos de pinzas más comunes pertenecen al tipo llamado pivotante. Los dedos de la pinza giran en relación con los puntos fijos del pivote. De esta manera, la pinza se abre y se cierra.

Otro tipo de pinzas se denominan de movimiento lineal. En este caso, los dedos se abren y se cierran ejecutando un movimiento paralelo entre sí.

Al momento de diseñar una pinza deben tomarse en cuenta la forma y peso de la pieza de trabajo, así como el tipo de movimiento que harán los dedos. Con estos lineamientos, se puede asegurar una buena sujeción, de tal forma que la pinza no modifique o dañe la estructura de la pieza. Una regla general es que la pinza debe sujetar a la pieza de trabajo en su centro de gravedad, esto ocasiona que se anulen los momentos que se pudieran generar por el peso de la pieza de trabajo.

Para reducir los tiempos de ciclo en operaciones de carga y descarga de piezas a máquinas-herramientas se pueden diseñar efectores finales con doble pinza. Existen otros tipos de pinzas como ventosas, pinzas magnéticas y pinzas adhesivas.
Dependiendo de la aplicación se puede sustituir las pinzas por herramientas.
Grados de libertad
Sin duda, una de las principales características que definen a los robots lo constituye los "grados de libertad" que posea. Hablar de "grados de libertad" equivale a decir número y tipo de movimientos del manipulador.

Observando los movimientos del brazo y de la muñeca, se puede determinar el número de grados de libertad que presenta un robot.
Generalmente, tanto en el brazo como en la muñeca, se encuentra una variación que va desde uno hasta los tres grados de libertad.
A la muñeca de un manipulador le corresponden los siguientes movimientos o grados de libertad: giro (hand rotate), elevación (wrist flex) y desviación(wrist rotate) como lo muestra el siguiente modelo.
Cabe hacer notar que existen muñecas que no pueden realizar los tres tipos de movimiento. Las muñecas, tanto del robot del sistema de almacenamiento y reposición automática (AS/RS) como la del robot Júpiter, muestran únicamente un grado de libertad de giro. Por su parte, la muñeca del robot MoveMaster Mitsubishi está diseñada para realizar movimientos de giro y de elevación. Es decir, presenta dos grados de libertad. Los grados de libertad del brazo de un manipulador están directamente relacionados con su anatomía, o configuración
Tipos de configuraciones
Cuando se habla de la configuración de un robot, se habla de la forma física que se le ha dado al brazo del robot.
El brazo del manipulador puede presentar cuatro configuraciones clásicas: la cartesiana, la cilíndrica, la polar y la angular.
Configuración cartesiana:
Posee tres movimientos lineales, es decir, tiene tres grados de libertad, los cuales corresponden a los movimientos localizados en los ejes X, Y y Z. Los movimientos que realiza este robot entre un punto y otro son con base en interpolaciones lineales. Interpolación, en este caso, significa el tipo de trayectoria que realiza el manipulador cuando se desplaza entre un punto y otro. A la trayectoria realizada en línea recta se le conoce como interpolación lineal y a la trayectoria hecha de acuerdo con el tipo de movimientos que tienen sus articulaciones se le llama interpolación por articulación.


Configuración cilíndrica:
Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad. El robot de configuración cilíndrica está diseñado para ejecutar los movimientos conocidos como interpolación lineal e interpolación por articulación. La interpolación por articulación se lleva a cabo por medio de la primera articulación, ya que ésta puede realizar un movimiento rotacional (ver movimiento A en el dibujo siguiente).


Configuración polar:
Tiene varias articulaciones. Cada una de ellas puede realizar un movimiento distinto: rotacional, angular y lineal. Este robot utiliza la interpolación por articulación para moverse en sus dos primeras articulaciones y la interpolación lineal para la extensión y retracción.


Configuración angular (o de brazo articulado):
Presenta una articulación con movimiento rotacional y dos angulares.Aunque el brazo articulado puede realizar el movimiento llamado interpolación lineal (para lo cual requiere mover simultáneamente dos o tres de sus articulaciones), el movimiento natural es el de interpolación por articulación, tanto rotacional como angular.


Además de las cuatro configuraciones clásicas mencionadas, existen otras configuraciones llamadas no clásicas.
El ejemplo más común de una configuración no clásica lo representa el robot tipo SCARA, cuyas siglas significan: Selective apliance arm robot for asembly. Este brazo puede realizar movimiento horizontales de mayor alcance debido a sus dos articulaciones rotacionales. El robot de configuración SCARA también puede hacer un movimiento lineal (mediante su tercer articulación).
Ejemplo de un robot SCARA:


Volumen de Trabajo:
Para acercarnos más al conocimiento de los robots industriales, es preciso tocar el tema que se refiere al volumen de trabajo y la precisión de movimiento. Entre las características que identifican a un robot se encuentran su volumen de trabajo y ciertos parámetros como el control de resolución, la exactitud y la repetibilidad.
El volumen de trabajo de un robot se refiere únicamente al espacio dentro del cual puede desplazarse el extremo de su muñeca. Para determinar el volumen de trabajo no se toma en cuenta el efector final.
La razón de ello es que a la muñeca del robot se le pueden adaptar gripers de distintos tamaños.
Para ilustrar lo que se conoce como volumen de trabajo regular y volumen de trabajo irregular, tomaremos como modelos varios robots.
|
| El robot cartesiano y el robot cilíndrico presentan volúmenes de trabajo regulares. El robot cartesiano genera una figura cúbica. |
|
| El robot de configuración cilíndrica presenta un volumen de trabajo parecido a un cilindro (normalmente este robot no tiene una rotación de 360°) |
|
| Por su parte, los robots que poseen una configuración polar, los de brazo articulado y los modelos SCARA presentan un volumen de trabajo irregular. |



Para determinar el volumen de trabajo de un robot industrial, el fabricante generalmente indica un plano con los límites de movimiento que tiene cada una de las articulaciones del robot, como en el siguiente caso:

Precisión de Movimientos:
La precisión de movimientos en un robot industrial depende de tres factores: la resolución espacial, la exactitud y la repetibilidad.
-
La resolución espacial se define como el incremento más pequeño de movimiento que puede ejecutar un robot depende
-
Directamente del control del sistema y de las inexactitudes mecánicas del robot.
-
Del control del sistema porque éste, precisamente, es el medio para controlar todos los incrementos individuales de una articulación.
-
La precisión de movimientos del robot depende, además de la resolución espacial, de la exactitud y de la repetibilidad.
-
La repetibilidad, el tercer y último factor, se refiere a la capacidad del robot de regresar al punto que se le programó las veces que sean necesarias.
-
El sistema de impulsión hidráulica es en la que se utiliza un fluido, generalmente un tipo de aceite, para que el robot pueda movilizar sus mecanismos. La impulsión hidráulica se utiliza para robots grandes, los cuales presentan mayor velocidad y mayor resistencia mecánica.
-
Se le da el nombre de impulsión eléctrica cuando se usa la energía eléctrica para que el robot ejecute sus movimientos. La impulsión eléctrica se utiliza para robots de tamaño mediano, pues éstos no requieren de tanta velocidad ni potencia como los robots diseñados para funcionar con impulsión hidráulica. Los robots que usan la energía eléctrica se caracterizan por una mayor exactitud y repetibilidad.
-
Solo resta hablar de aquellos robots que se valen de la impulsión neumática para realizar sus funciones. En la impulsión neumática se comprime el aire -abastecido por un compresor-, el cual viaja a través de mangueras. Los robots pequeños están diseñados para funcionar por medio de la impulsión neumática. Los robots que funcionan con impulsión neumática están limitados a operaciones como la de tomar y situar ciertos elementos.
Las inexactitudes mecánicas se encuentran estrechamente relacionadas con la calidad de los componentes que conforman las uniones y las articulaciones. Como ejemplos de inexactitudes mecánicas pueden citarse la holgura de los engranes, las tensiones en las poleas, las fugas de fluidos, etcétera.
Para explicar con mayor precisión el término resolución espacial tomemos el siguiente ejemplo:


En el dibujo de la derecha, se supone que utilizando el teach pendant, se mueve al robot del P1 al P2, en este caso el P2 representa el menor incremento que se puede mover el robot a partir de P1. Si se observan estos incrementos en un plano se vería como una cuadricula. En donde en cada intersección de líneas se encuentra un punto "direccionable" es decir un punto que puede ser alcanzado por el robot. De esta forma la resolución espacial puede definirse también como la distancia entre dos puntos adyacentes (en la primer figura sería la distancia entre los puntos P1 y P2), es importante señalar que para un robot que tuviera este espacio de trabajo la distancia entre puntos esta muy exagerada para efectos de explicar el término.
La exactitud se refiere a la capacidad de un robot para situar el extremo de su muñeca en un punto señalado dentro del volumen de trabajo.
La exactitud mantiene una relación directa con la resolución espacial, es decir, con la capacidad del control del robot de dividir en incrementos muy pequeños el volumen de trabajo.
En el dibujo si quisiera mover el robot exactamente al punto donde se encuentra la pieza de trabajo, el robot solamente podría acercarse al objeto posicionándose en el punto direccionable más próximo. En otras palabras, no podría colocarse exactamente en la posición requerida.
Un robot presenta una mayor exactitud cuando su brazo opera cerca de la base. A medida que el brazo se aleja de la base, la exactitud se irá haciendo menor. Esto se debe a que las inexactitudes mecánicas se incrementan al ser extendido el brazo.
Otro factor que afecta a la exactitud es el peso de la carga, las cargas más pesadas reducen la exactitud (al incrementar las inexactitudes mecánicas).
El peso de la carga también afecta la velocidad de los movimientos del brazo y la resistencia mecánica.

En el dibujo, al robot se le enseñó el punto programado (PP), al indicarle mediante un comando de programación que regrese al punto PP el robot se puede colocar en el punto de regreso (PR) o en otro punto de regreso que tenga la misma distancia hacia PP.
En el dibujo del robot esta diferencia entre el punto PP y el PR está muy exagerada, ya que en un robot industrial se espera que la repetibilidad esté en el orden de +/- 0,0490 mm.
Cabe hacer la aclaración que si usamos un microscopio, es posible apreciar las microscópicas variaciones que presenta el robot cada vez que regresa al punto indicado. En otras palabras, no existe la repetición absolutamente exacta.
Sistemas de Impulsión:
Los más comunes son tres: impulsión hidráulica, impulsión eléctrica e impulsión neumática.
Es importante señalar que no todos los elementos que forman el robot pueden tener el mismo tipo de impulsión.
CARACTERÍSTICAS FÍSICAS DE LOS ROBOT EXAMINADOS
Robot Unimate modelo PUMA.

Este robot presenta una configuración angular, tiene 3 grados de libertad en el cuerpo y brazo y 3 en la muñeca, dando un total de 6 grados de libertad.

Su utilización principal en la celda de manufactura, o producción, es para carga y descarga de materiales a las maquinas de control numérico.
Robot del sistema AS/RS

Este es un robot de configuración cartesiana, tiene 3 grados de libertad en el cuerpo y brazo (correspondiente a los ejes X, Y, Z), un grado de libertad rotacional en la muñeca.
Descargar
| Enviado por: | Reinheimer Romero |
| Idioma: | castellano |
| País: | Argentina |
Todos los derechos reservados.