Electromecánica de vehículos
Proyecto de un cierre centralizado de una puerta de coche
1. GENERALIDADES
1.1 INTRODUCCION
1.1.1 DEFINICION
Un automatismo industrial es un sistema constituido por diferentes dispositivos y elementos que al recibir una serie de informaciones procedentes del exterior es capaz de generar las órdenes necesarias para que, los receptores por él controlados realicen la función para la que fue diseñado.
La naturaleza de los dispositivos y elementos que constituyen un automatismo es muy variada. Los primeros automatismos eran exclusivamente mecánicos; según fue evolucionando la técnica aparecieron los automatismos eléctricos y electrónicos, estando hoy en día constituidos básicamente por elementos eléctricos y electrónicos, pero poseyendo también elementos mecánicos, neumáticos e hidráulicos.
1.1.2 CLASIFICACIÓN DE LOS AUTOMATISMOS
Existen muchas formas de clasificar los automatismos, pero podemos resumirlas en las siguientes:
-Según los elementos empleados se clasifican en:
+Mecánicos. Son los más antiguos y están formados por engranajes, palancas, levas, etc….
+Eléctricos. Basan su funcionamiento en los contadores, relés, pulsadores, conmutadores, etc…, pero siguen empleando elmentos mecánicos.
+Neumáticos. Su funcionamiento es por aire comprimido y emplean elementos como los cilindros, válvulas neumáticas, electroválvulas, tec…, utilizando también elementos mecánicos y eléctricos en su estructura.
+Electrónicos. Basan su funcionamiento en los circuitos digitales y emplean componentes electrónicos, integrados y discretos. Utilizan también elementos mecánicos, eléctricos y neumáticos incluyendo los más modernos sistemas informáticos.
-Según su capacidad de trabajo se clasifican en:
+Automatismos cableados o no programables. Son aquellos que sólo sirven para la función para la que han sido diseñados, teniendo que variar los elementos que lo componen de forma parcial o total para que realicen otra función.
+Automatismos programables. Están basados en los microproce-
sadores cuya función varía con el programa que está grabado en la memoria interna o externa de un sistema de desarrollo de microprocesadores.
1.2. ESPECIFICACIONES
1.2.1. MÉTODOS DE DISEÑO DEL CIRCUITO DE MANDO DE UN AUTOMATISMO.
Cualquier automatismo puede ser diseñado como automatismo cableado o programables, el empleo de uno u otro sistema dependerá de varios factores, entre los que destacan: complejidad, volumen que tener, localización y fin del automatismo, economía, etc….
-Diseño para automatismos no programados.
Seguiremos el proceso señalado en el diagrama de la Figura 1.2.1.
Condiciones Sistema Ecuación
de diseño de diseño lógica
Economía Circuito
práctico
Normas de
seguridad
Figura 1.2.1. Diagrama de diseño de automatismos no programables.
Partiremos de las condiciones físicas del funcionamiento del sistema, en las cuales habrá que definir:
*Variables o información de entrada.
*Forma de funcionamiento del automatismo (sin ciclo de trabajo).
*Elementos o receptores de salida.
Con estas condiciones de funcionamiento pasaremos a seleccionar el método de diseño del automatismo entre alguno de los siguientes:
+Diseño por tabla de la verdad. Cuando se trata de automatismos de pequeña complejidad y con pocas variables de entrada; es el método más adecuado. Consiste en plantear la tabla de la verdad y por álgebra de Boole obtener la ecuación lógica que define su funcionamiento.
El álgebra de Boole es un tipo de álgebra que, basándose en la teoría de conjuntos, se aplica a sistemas matemáticos en los que sólo existen dos elementos posibles; el 1 y el 0.
De la anterior definición se deduce su posibilidad de ser aplicada al análisis y diseño de circuitos digitales, simplemente precisando el siguiente convenio:
-Presencia de tensión = 1
-Ausencia de tensión = 0
+Diseño por autómatas finitos (Métodos de Meally y Moore). Método más evolucionado que permite el diseño de automatismos con muchas variables, pero que en la práctica sólo se emplea en el diseño de sistemas secuenciales síncronos.
+Diseño razonado. Método que, clasificando las variables de entrada como creadoras y anuladoras de cada receptor o salida, aplica el teorema siguiente:
La ecuación de cualquier función se obtiene por el producto de cada una de las variables anuladoras negadas, multiplicado por la suma de todas las variables creadoras sin negar.
Es un método bastante simple y fácil de aplicar.
Partiendo de algunos de los anteriores métodos se obtendrá la o las ecuaciones de funcionamiento del sistema. Una vez obtenidas las ecuaciones llega la hora de realizar su implementación práctica; en este momento, y teniendo siempre en cuenta las normas de seguridad y los principios económicos, deberemos elegir la implementación del circuito entre alguna de las siguientes formas:
*Circuito implementado con puertas y circuitos lógicos.
*Circuito implementado con contactores o relés y pulsadores.
*Circuito implementado con elementos neumáticos o hidráulicos.
-Diseño para automatismos programables
Figura 1.2.2. Diagrama de diseño de automatismos programables
Partiendo de las condiciones de funcionamiento, realizaremos bien ina tabla de verdad simplificada de funcionamiento o bien una tabla de estados o secuencia según el tipo de trabajo que realice el automatismo.
Seguidamente se obtendrá el diagrama de flujo o algoritmo que representa el funcionamiento del sistema, para pasar por último a la confección del programa correspondiente. Dicho programa se realizará dependiendo del sistema que vaya a controlar el automatismo, en lenguaje ensamblador o el lenguaje de alto nivel.
1.2.2. FORMAS DE FUNCIONAMIENTO DE UN AUTOMATISMO Y SEÑALES DE CONTROL.
Los automatismos industriales trabajan habitualmente de dos formas completamente diferentes:
-Automatismos sin ciclo de trabajo. Son aquellos en los que las salidas se activan sin seguir un orden preestablecido, obteniendo las informaciones presentes en la entrada del automatismo. No existe, por tanto, secuencia de trabajo.
Este tipo de automatismos no trabaja realizando una secuencia fija de activación de sus salidas, dependiendo solamente dicha activación del valor que tomen el conjunto de sus entradas.
Los automatismos sin ciclo pueden trabajar, a su vez, de dos formas:
*Automatismos sin memoria del último estado de salida.
*Automatismos con memoria del último estado de salida.
En los primeros automatismos, la respuesta del automatismo no tiene para nada en cuenta la situación de la salida en el momento inmediatamente anterior a producirse una variación en la entrada. Por el contrario, en los automatismos con memoria sí la tienen en cuenta. La mayor parte de los automatismos que trabajan sin ciclo funcionan con memoria del último estado de sus salidas.
Los automatismos sin ciclo de trabajo se caracterizan por poseer los siguientes tipos de entradas:
*Entrada/s de activación o <<marcha>>.
*Entrada/s de detección o <<parada>>.
-Automatismo con ciclo de trabajo. En estos automatismos sus salidas se activan secuencialmente siguiendo un orden preestablecido. El paso de un estado de salida al siguiente se produce al activarse una determinada entrada del automatismo.
Lo que más destaca en este tipo de automatismos es el funcionamiento secuencial de sus salidas. Esta secuencialidad implica la necesidad de que estos automatismos siempre con memoria del último estado de las salidas.
Los automatismos con ciclo de trabajo pueden efectuar su función de dos formas básicas:
-Automatismos con ciclo que trabajan en <<ciclo único>>.
En esta forma de trabajo, el automatismo comienza su funcionamiento al producirse una orden de marcha, realizando toda su secuencia de trabajo según se va produciendo la activación de la entrada oportuna. El automatismo se detiene por sí solo al final del ciclo de trabajo.
Estos automatismos poseen los siguientes tipos de entradas:
*Entrada de <<marcha>>.
*Entrada de secuencia o cambio de fase.
*Entrada de <<emergencia>>. Esta entrada detiene instantáneamente la secuencia de trabajo allí donde se produce.
-Automatismo con ciclo que trabajan en <<ciclo automático>>
En este caso, el automatismo realiza el ciclo de trabajo al recibir la orden de marcha. Cuando llega al fin del ciclo comienza uno nuevo sin necesidad de orden de marcha, efectuando ciclos de manera indefinida hasta la recepción de una orden de parada.
Son precisos, en consecuencia, los siguientes tipos de entradas:
*Entrada de <<marcha>>.
*Entradas de secuencia o cambio de fase.
*Entrada de <<parada>>. Hay que destacar que esta entrada no para instantáneamente el automatismo, sino que desmemoriza el trabajo en ciclo automático, cusa por la cual el automatismo se para el final del ciclo de trabajo en curso.
*Entrada de <<emergencia>>.
*Entrada de <<rearme>>. La orden de emergencia no debe desactivarse con la simple activación de la orden de marcha por simples razones de seguridad. En la práctica es, por tanto, conveniente añadir una nueva entrada, cuya activación anule la memorización de emergencia con lo cual se desbloquee la entrada de marcha; a esta entrada se la denomina rearme.
1.2.3. ELEMENTOS EMPLEADOS EN AUTOMATISMOS INDUSTRIALES ELÉCTRICOS ELECTRÓNICOS.
Seguidamente enumeramos los más importantes:
*Pulsadores. Son elementos de interrupción de corriente con dos posiciones de salida de las cuales sólo una es reposo, mientras que la otra se activa solamente durante el tiempo que esté oprimido su eje de accionamiento.
Existen muchos tipos, siendo los más importantes:
-Normalmente abiertos. Su representación simbólica aparece en la figura 1.4.
-Normalmente cerrados. En la figura 1.1 aparece su representación más común.
-Múltiples. Son combinaciones de los anteriores montados sobre un mismo eje.
1.3 TIPO DE AUTOMATISMO
Nosotros hemos elegido, dos automatismos: elevalunas eléctricos y cierre centralizado.
1.3.1 ELEVALUNAS ELÉCTRICO
Con el fin de aumentar la comodidad en la conducción y evitar la distracción del conductor cuando tiene que subir o bajar las lunas de las ventanillas del automovil por el clásico sistema mecánico de una manivela, se han ideado sistemas de accionamiento eléctrico de lunas de modo que con la sola pulsación de un interruptor estas suben o bajan hasta el punto que el conductor quiere sin que esta operación presente la menor distracción en el uso de las manos principales del vehículo.
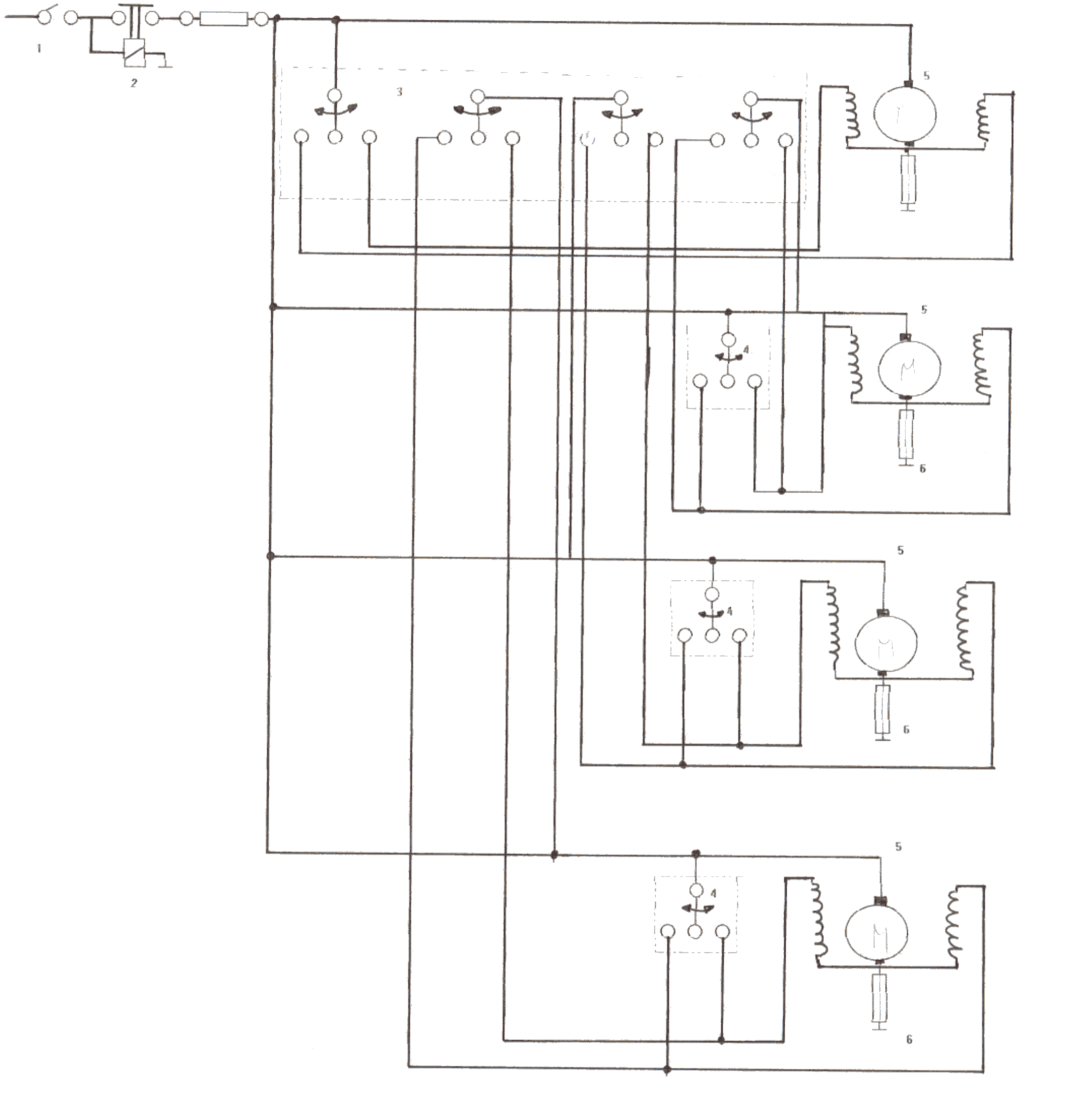
Una instalación completa de estos elevalunas eléctricos la puede ver en la figura 3.4
Cada ventanilla lleva instalado un motor eléctrico en el mecanismo del alzacristales, que se ha señalado en 5, y por un mecanismo de palancas que transmite el movimiento a la luna, haciéndola descender o ascender, según los casos.
Son muy corrientes las instalaciones de elevalunas que solamente accionan las ventanillas delanteras, en cuyo caso constan solamente de dos motores, pero también existen instalaciones más completas como la mostrada en la figura 3.4 , en las que el automatismo es total para las cuatro lunas de cada una de las ventanillas del automóvil. Como puede verse en el citado esquema, cada motorcillo lleva un conmutador independiente, a excepción de la ventanilla delantera izquierda, al lado del conductor, el cual puede accionar desde su asiento cualquier posición de las demás ventanillas del coche.
La toma de corriente procede del relé de arranque (2) y de la llave de contacto (1) estando protegida la instalación por varios fusibles.
Para facilitar la subida y bajada de los cristales, el motor reversible, mediante dos bobinas inductoras por las que circula la corriente independientemente y en sentido opuesto, según la posición de los conmutadores (3) y (4). Colocando el conmutador a la derecha o a la izquierda, hace que el cristal suba o baje.
Por último, en la figura 3.4, tenemos señalado en 6 el fusible de protección de cada motor que existe en este circuito.
Como todos los circuitos de accesorios, los elevalunas eléctricos se integran en la instalación a partir de la platina principal de fusibles y relés y por medio de conectores llegan hasta los órganos de mando y potencia que componen el circuito.
En la figura 1.6. tenemos la forma de integración en una instalación eléctrica de RENAULT. En 47 vemos el conector de la platina que recibe la corriente a través de dos fusibles (11y 13) los cuales protegen el circuito de cada uno de los motores independientemente. Desde el conector (47) y a través del clip de conexión (85) la corriente se deriva hacia uno de los mandos de los motores eléctricos. Estos mandos (37 para elevalunas izquierdo y 38 para el derecho) son los que mandan la corriente a los motores de dos formas diferentes para que se pueda efectuar con ello la subida y bajada del cristal. A estos mandos se les suele llamar inversores y son siempre alimentados después del interruptor de contacto para asegurar el cierre de los cristales cuando al automóvil está aparcado y el interruptor de contacto abierto.
En posición de reposo los dos hilos de cada motor van a pasar a masa (98) para asegurar su fijación del cristal en la postura elegida. Cuando se acciona el inversor izquierdo (37) en su posición de subida, por ejemplo, la corriente pasa al conductor 197 N4 y de aquí al motor, al que hace girar en sentido de subida; pero cuando se acciona el inversor en posición de bajada el conductor de masa, con lo que el motor invierte su giro. De la misma forma se comporta el motor derecho y su correspondiente inversor.
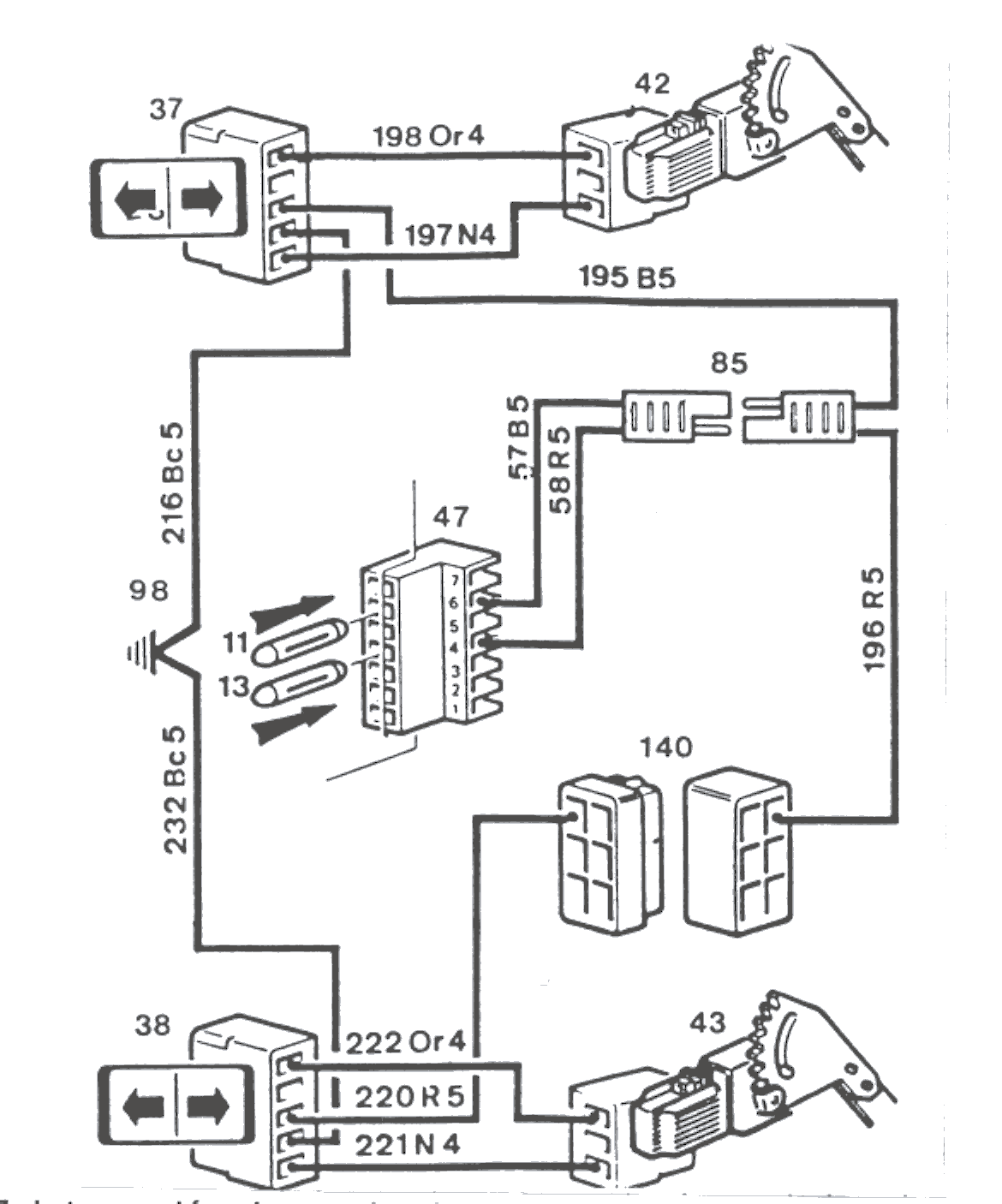
Figura 1.6. Integración de un circuito de elevalunas eléctrico en la instalación general.
1.4. NORMATIVA VIGENTE
Artículo 012. Instalaciones de enlace. Cajas generales de protección.
Artículo 016. Instalaciones de enlace. Dispositivos privados de mando y protección.
Artículo 019. Instalaciones interiores receptores. Tubos protectores colocación de estos tubos-
Artículo 028. Instalaciones con fines especiales, para máquinas de elevación y transporte.
Artículo 030. Instalaciones a tensiones especiales.
Artículo 034. Receptores a motor.
Artículo 042. Inspección de las instalaciones. Revisión periódica.
Artículo 043. Normas UNE de obligatorio cumplimiento, publicados por el instituto de racionalización y normas (IRANON).
2 CALCULOS
2.1. FORMAS DE RESOLVER AUTOMATISMOS
Mediante temporizadores, que pueden ser;
La dificultad generalmente está en las simplificaciones; lo primero se empieza obteniendo la función sin memoria: lo segundo se dibujan los cronogramas: lo tercero es que en la ecuación anterior de introduce la función memoria: y por fin lo último se dibujan el logigrama.
Su esquema es el siguiente:
Mecánicos
Analógicos Neumáticos
Eléctricos
Electrónicos
TEMPORIZADOR
Contactor
Digitales
Programables
CLASE = modo de trabajo a la conexión
FIJOS
a la desconexión
VARIABLES
a la conexión y desconexión
Con autómatas programables:
¿ Qué es?
Máquina electrónica programada para personal no informático que sirve para trabajar en un medio industrial, en un tiempo real y que realiza funciones lógicas, encablamientos y ciertos cálculos. Responde el siguiente esquema:
CAP AU AC
TO TU
TA E/S S A
MA DO
DOR TAS RES
Periféricos
Pretende pasar de cablear a teclear. La parte de fuerza (o potencia) sigue existiendo.
Lo importante de un autómata programable es:
-Emplear electrónica estática.
-Alta velocidad de respuesta.
-Pequeñas dimensiones.
-Capacidad de diagnostico.
-Capacidad de almacenar memoria alta.
-Numerosos lenguajes alternativos.
-Gran número de E/S y a ser posible inteligentes.
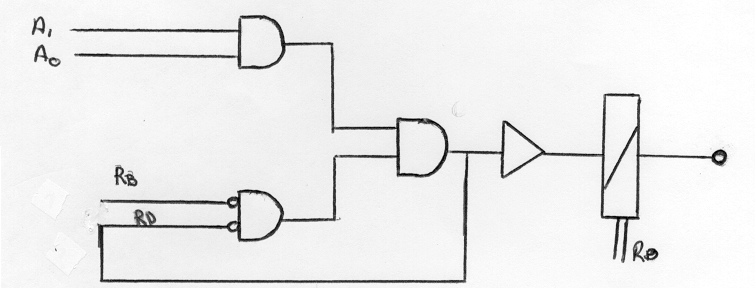
Variables de acción: A1, Rb, Rd
Variables de cambio: Ao
F= A1 * Rb* Rd* Ao
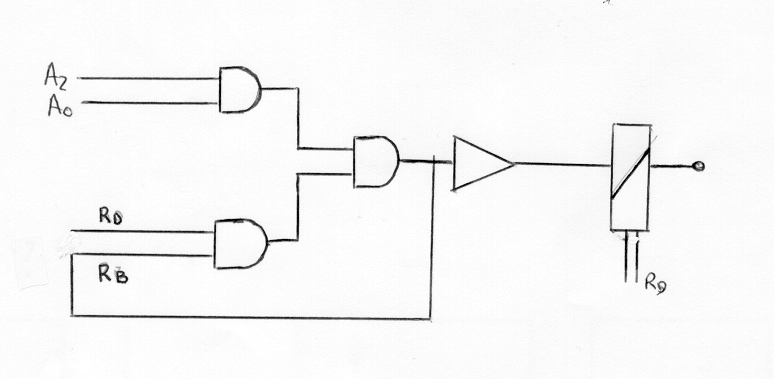
Variables de acción: A2, Rd, Rb
Variables de cambio: Ao
F= A2* Ao* Rd* Rb
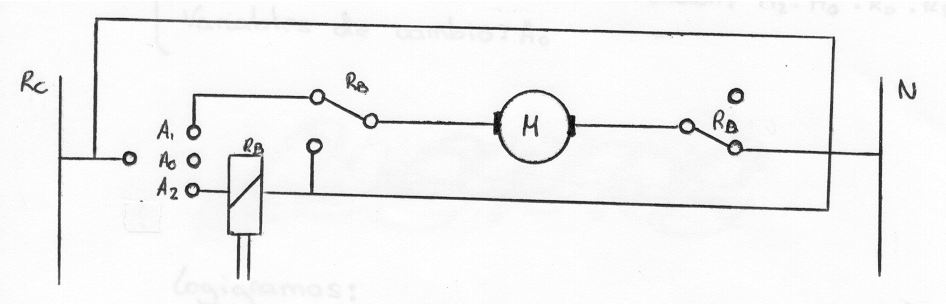
DESCRIPCION DE FUNCIONAMIENTO DEL ELEVALUNAS ELECTRICO
El esquema del elevalunas eléctrico que hemos diseñado es bastante sencillo, consiste en un conmutador que es el que acciona el circuito y el cual tiene dos posiciones:
1º. Accionando el conmutador hacia la posición de arriba en el esquema hace que el motor se accione hacia por ejemplo la derecha, conectando directamente el positivo a una patilla del motor y el negativo a la otra patilla del motor.
2º. Accionando el conmutador hacia la posición de abajo en el esquema que se accione el relé, los contactos del relé cambian la polarización del motor, es decir, donde antes estaba el positivo ahora está el negativo y donde antes estaba el negativo ahora está el positivo.
3º. La tercera posición es la posición del centro y esta patilla no va conectada a ningún sitio ya que en un coche lo normal es que no bajes o subas constantemente la ventanilla.
PLANOS
DE SITUACION
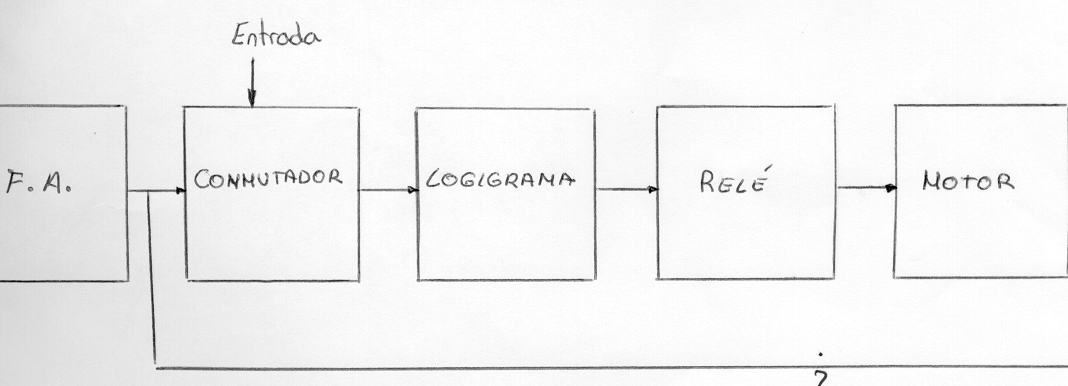
ESQUEMA A BLOQUES
ESQUEMA DE POTENCIA
ESQUEMA DE MANDO
LOGIGRAMA
-
PRESUPUESTO
*Elevalunas eléctrico ~ 7.000 ptas x4 = 28.000 ptas
*Mano de obra ~ 10.000 ptas + IVA
*30 metros de cable ~ 50 ptas/metro = 1.500 ptas
~ 45.820 ptas
-
PLIEGO DE CONDICIONES
El técnico especialista no se hace responsable del funcionamiento de este circuito si no se utilizan los elementos adecuados.
Además la instalación debe de realizarse poe un experto en automatismos y automoción.
La garantía de los productos instalados es de por vida, incluida la mano de obra. (Si el error ha sido de los profesionales).
Este circuito está exento del problema del efecto 2000.
-
BIBLIOGRAFIA
-Libro de electrónica digital.
-Enciclopedia del automóvil CEAC
-Taller del automóvil MAVECo
-Libro de diseño de microprocesadores
INDICE
1. GENERALIDADES
1.1 Introducción
1.1.1 Definición
1.1.2. Clasificación de los automatismos
1.2 Especificaciones
1.2.1. Métodos de diseño del circuito de mando de un
automatismo
1.2.2. Formas de funcionamiento de un automatismo y señales de
control
1.2.3. Elementos empleados en automatismos industriales
eléctricos electrónicos
1.3. Tipo de automatismo
1.3.1.Elevalunas electricos
1.4. Normativa vigente
2. Calculos
2.1. Formas de resolver automatismos
2.2. Descripcion de funcionamiento del elevalunas
Planos
De situación
Esquema a bloques
Esquema de potencia
Esquema de mando
Logigrama
Presupuesto
5. Pliego de condiciones
6. Bibliografía
Descargar
| Enviado por: | Alvaro Cuadrado |
| Idioma: | castellano |
| País: | España |
Todos los derechos reservados.