Electrónica, Electricidad y Sonido
Megabus IEEE (Institute Of Electrical and Electronics Engineers) 488
CONTENIDO E ÍNDICE
1. Introducción pag. 2
2. Historia del megabus 2
3. Descripción del estándar IEEE-488 4
Regulador del sistema y regulador activo 5
Receptores, transmisores y reguladores 5
Señales de la interfaz 5
Líneas de datos 6
Líneas de handshake 6
Handshake 7
Líneas de gestión del interfaz 8
Direccionamiento de los dispositivos 9
Características físicas 9
Extensión del bus 10
Características eléctricas 11
Resumen 12
Otros sistemas de interconexión 12
Conexión normalizada VXI 12
Introducción 12
Especificaciones mecánicas y de potencia 12
Señales de la barra VXI 13
Dispositivos conectables a la barra VXI y sus configuraciones 15
Tendencias actuales 17
5. Información técnica 20
6. Bibliografía consultada y otras referencias 25
INTRODUCCIÓN
Para la realización de medidas complejas no es lógico pensar en un instrumento universal, ya que su coste sería excesivo. Debemos disponer de un sistema de instrumentos que puedan realizar las funciones deseadas. En la actualidad hay dos formas de configurar un sistema de este tipo: mediante unidades modulares o con equipos compatibles.
Se consideran instrumentos modulares aquellos que para realizar su función precisan el soporte físico de un instrumento o estructura base. A este tipo pertenecen, por ejemplo, las unidades enchufables a algunos osciloscopios, los instrumentos basados en ordenadores personales e infinidad de equipos diseñados según el interfaz CAMAC (Computer Automated Measurament and Control, Medida y control automatizados mediante ordenador).
La limitación de las funciones disponibles en forma modular, a un coste razonable, nos inclina a buscar una solución basada en instrumentos completos compatibles entre sí, lo que acarrea diferentes problemas, que van desde los meramente físicos (por ejemplo, el empleo de diferentes clavijas, o niveles de tensión), hasta los más conceptuales, acerca de la interpretación de la información que se comunican unos a otros. De ahí que, si no se dispone de otros recursos, la solución deberá hacerse a la medida del problema y por lo tanto, cara.
A principio de los setenta, varios fabricantes de instrumentación empezaron a estudiar la forma de armonizar los aspectos básicos para garantizar la compatibilidad de la interconexión entre sus respectivos productos. Como resultado de este empeño se publicó inicialmente el sistema CAMAC y poco después la norma IEEE 488-1975 (revisada posteriormente en 1978), aceptada también por la IEC (International Electrotechnical Commission, Comisión Electrotécnica Internacional). Ambos sistemas, así como la instrumentación soportada por los ordenadores personales, se basan en el uso de una línea común o bus para la interconexión. Consiste en una línea de comunicación común a la que todos los instrumentos están conectados simultáneamente en paralelo lo que facilita la adición de nuevos equipos: no es necesario modificar los ya conectados, cada equipo sólo necesita un bus de entrada/salida, y la transferencia de información entre equipos es directa. Sin embargo, esta simplificación obliga a introducir algún protocolo de comunicación para poder transferir la información entre los equipos. La adopción de métodos normalizados para realizar esto ha sido uno de los aspectos más relevantes en el desarrollo de la instrumentación electrónica, ya que no sólo facilita el montaje de un sistema de instrumentación, sino que además reduce el riesgo de obsolescencia de los instrumentos.
2. Historia del megabus
El megabus IEEE-488 fue desarrollado en 1978 para conectar y para controlar los instrumentos programables, y para proporcionar un interfaz estándar para la comunicación entre los instrumentos de diversas fuentes. Hewlett-Packard, empresa establecida en Palo Alto, California, desarrolló 13 años antes la técnica de interconexión, y la llamó HP-IB (Hewlett - Packard Instrumentation Bus, Bus Hewlett - Packard de Instrumentación). Originalmente, el objetivo era permitir que sus equipos pudieran conectarse con los de otros fabricantes y con ordenadores funcionando como "hosts".
El interfaz ganó rápidamente renombre en la industria del ordenador y debido a su gran versatilidad, el comité del IEEE (Institute of Electrics and Electronics Engineers, Instituto de ingenieros eléctricos y electrónicos) lo rebautizó GPIB (General Purpose Interfaz bus, Bus de Interfaz de Fines Generales) aunque también es conocido como megabus de interfaz de fines generales, ASCII BUS, PLUS BUS, etc.
Sin embargo, tal y como se definió originalmente el estándar IEEE-488, no quedaron demasiado claro ciertos aspectos como por ejemplo la interacción del controlador y los instrumentos y la comunicación entre éstos. Hasta que no se resolvieron estas cuestiones el resultado fue una gran confusión entre los diseñadores y problema de incompatibilidad entre los instrumentos de distintos fabricantes.
Durante la década de los 80, el estándar fue modificado, dando origen al IEEE-488.2. El original fue rebautizado como IEEE-488.1. El nuevo estándar proporcionó información más específica sobre el contenido y la estructura de los mensajes, así como de los protocolos de comunicación.
IEEE-488.2 es totalmente compatible con IEEE-488.1; el uso de un controlador que cumpla el estándar "488.2" asegura que será capaz de entender los protocolos de los nuevos instrumentos así como los de aquellos que siguen el 488.1.
En la actualidad, IEEE-488 es el método de comunicación entre instrumentos, ya sea en el campo de la ingeniería como en cualquier otro campo científico. La gran mayoría de los fabricantes dedicados a la instrumentación electrónica incluyen interfaces IEEE-488.
Los controladores IEEE-488 soportan gran variedad de ordenadores personales, desde los IBM PC/XT/AT o PS/2 y compatibles hasta los Macintosh.
Algunos de estos controladores son tarjetas del tipo plug-in y otros son convertidores de protocolos (por ejemplo de SCSI a IEEE-488). Todos cumplen como mínimo el estándar IEEE-488.1 y un número creciente de ellos el "488.2".
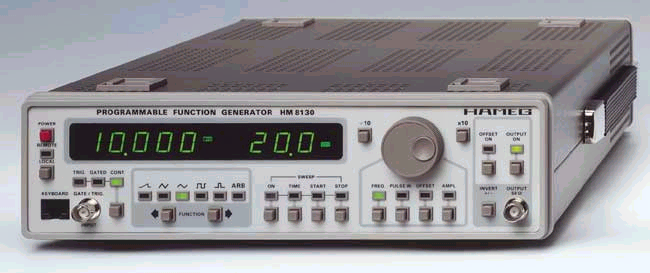
Fig.1.) Generador programable de funciones, compatible con el estándar IEEE 488, cortesía de HAMEG.
3. Descripción del estándar IEEe-488
Casi cualquier instrumento se puede utilizar con la especificación IEEE-488, porque no dice nada sobre la función del instrumento en sí mismo, o sobre la forma de los datos que genera. En lugar de eso, la especificación define un componente separado, el interfaz, que se puede agregar al instrumento. Las señales que pasan por el interfaz del megabus IEEE-488 y del instrumento se definen en el estándar. El instrumento no tiene control completo sobre el interfaz. A menudo el regulador del megabus le dice al interfaz qué hacer. El regulador activo realiza las funciones de control del megabus para todos los instrumentos que están conectados al bus.
El sistema descrito en la norma IEC-625.1-1980, difiere sólo en el conector, que es de 25 contactos (en vez de 24), ya que incluye una línea de retorno adicional para la señal. Un inconveniente de este conector es su compatibilidad mecánica con el CCITT-V24 (RS-232-C), que no se traduce en compatibilidad eléctrica, ya que éste maneja 25V, 500 mA, frente a los 5V, 48 mA del primero. Un intercambio puede ser fatal.
Estas normas se refieren a los aspectos mecánico, eléctrico y funcional (funciones permitidas en la interfaz), pero no a los aspectos operativos (funciones permitidas a cada instrumento). Las normas complementarias son la IEEE 728-1982: Recommended Practice for Code and Format Convenctions for IEEE standard 488-1978, y la IEC 625.2, pero estas dos discrepan entre sí.
Hay que tener presente, pues, que la norma IEEE 488 no dice nada sobre qué es la información presente en el bus o, qué formato debe tener, o qué código hay que seguir. Sólo dice como enviarla de un lado a otro. Normalmente, por ejemplo, los datos están codificados en ASCII, y el bit más significativo es el que sale primero. Pero, dado que no se dice nada de la organización de los datos, puede que un instrumento saque el byte más significativo primero y, en cambio, otro lo saque el último. También puede suceder que dos instrumentos distintos requieran órdenes totalmente distintas para realizar la misma función. Sin embargo, en ambos casos los instrumentos pueden cumplir la norma IEEE 488.
3.1. Regulador del sistema y regulador activo
En el tiempo de ciclo inicial, el interfaz IEEE-488 que se programa para ser el regulador del sistema se convierte en el regulador activo en carga. El regulador del sistema tiene varias capacidades únicas incluyendo la capacidad de enviar el interfaz claro (IFC) y el telecontrol permite los comandos (REN). IFC borra todos los interfaces de dispositivo y devuelve el control al regulador del sistema. REN permite que los dispositivos respondan a los datos del megabus cuando esté dispuesto para recibir. El regulador del sistema puede pasar opcionalmente el control a otro regulador, que entonces hace las veces de regulador activo.
3.2. Receptores, transmisores y reguladores
Hay 3 tipos de dispositivos que se puedan conectar con el megabus IEEE-488 (receptores, transmisores, y reguladores). Algunos dispositivos incluyen más de una de estas funciones. El estándar permite que un máximo de 15 dispositivos sea conectado en el mismo megabus. Un sistema mínimo consiste en un regulador y un dispositivo transmisor o módulo de escucha (por ejemplo, un HP con 700 un interfaz IEEE-488 y un voltímetro).
Es posible tener varios reguladores en el megabus pero solamente uno puede ser activo en un momento dado. El regulador activo puede pasar el control a otro regulador que posteriormente podrá pasárselo a otro regulador. Un módulo de escucha es un dispositivo que puede recibir datos del megabus cuando es mandado por el regulador y un transmisor transmite datos al megabus cuando está activado. El regulador puede instalar un transmisor y un grupo de receptores de modo que sea posible enviar datos entre los grupos de dispositivos también.
3.3. Señales del interfaz
El sistema de interfaz IEEE-488 consiste en 16 líneas de señales y 8 líneas de tierra. Las 16 líneas de señales se dividen en 3 grupos (8 líneas de datos, 3 líneas de handshake, y 5 líneas para la gestión del interfaz).
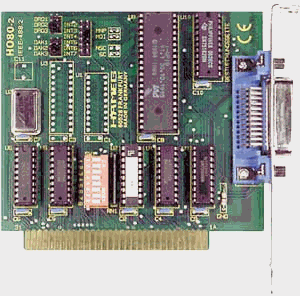
(Fig.2.) Aspecto del interfaz para el estándar IEEE 488.2, cortesía de HAMEG.
Se aprecian los microinterruptores que permiten el direccionamiento del dispositivo.
3.4. Líneas de datos
Las líneas DIO1 a DIO8 se utilizan para transferir direccionamientos, la información de control y datos. Los formatos para los direccionamientos y los bytes del control son definidos por el estándar de IEEE 488. Los formatos de datos son indefinidos y pueden ser ASCII (con o sin paridad) o binarios. DIO1 es el bit menos significativo (nótese que esto corresponderá al dígito binario 0 en la mayoría de los ordenadores).
3.5. Líneas de handshake
Las tres líneas de handshake (NRFD, NDAC, DAV) controlan la transferencia de los bytes del mensaje entre los dispositivos y forman el método para reconocer la transferencia de datos. Este proceso del handshake garantiza que los bytes en las líneas de datos son enviados y recibidos sin errores de la transmisión, siendo una de las características únicas del megabus IEEE-488.
La línea del handshake de NRFD (no listo para los datos) es activada por un módulo de escucha para indicar que no todavía no está listo para recibir el siguiente byte de datos o de control. Observe que el regulador no verá NRFD libre (es decir, indicando "listo para los datos") hasta que todos los dispositivos la hayan liberado.
La línea del handshake de NDAC (datos no validados) es activada por un módulo de escucha para indicar que todavía no ha validado el byte de los datos o del control en las líneas de datos. Observe que el regulador no verá la línea de NDAC libre (es decir, indicando que se han validado los datos) hasta que todos los dispositivos la hayan liberador.
La línea de handshake de DAV (datos válidos) es activada por el transmisor para indicar que un byte de los datos o del control se ha puesto en las líneas de datos y ha tenido el tiempo mínimo especificado que se estabilizaba. El byte se puede ahora validar con seguridad por los dispositivos.
3.6. Handshake
El proceso de handshake se desarrolla como sigue. Cuando el regulador o un transmisor desea transmitir datos sobre el megabus, fija la línea de DAV (Data valid, Dato válido) a nivel alto, y comprueba que las líneas de NRFD (Nor ready for data, Instrumento no preparado para recibir datos) y de NDAC (No data accepted, Dato no aceptado) están a nivel bajo, y entonces pone los datos en las líneas de datos.
Cuando todos los dispositivos que pueden recibir los datos están listos, cada uno libera su línea de NRFD. Cuando el receptor anterior libera la NRFD, y pasa a ALTO, el regulador o el transmisor toma el punto bajo de DAV que indica que los datos válidos ahora están en el megabus.
En respuesta cada receptor pone de nuevo a nivel bajo la línea de NRFD para indicar que está ocupado y libera NDAC cuando ha recibido los datos. Cuando el último receptor ha validado los datos, la línea NDAC pasará a nivel alto y el regulador o el transmisor puede fijar la DAV a nivel alto otra vez para transmitir el siguiente byte de datos.
Obsérvese que si después de la activación la línea de DAV está a nivel alto, el controlador o el transmisor entiende que tanto la línea NRFD como la NDAC están a nivel alto, siendo esta circunstancia una posible causa de error. Así mismo, si cualquier dispositivo falla al elaborar su parte del handshake y libera la NDAC o la NRFD, los datos no pueden ser transmitidos por el bus. Es posible que se genere un error por sobrepasar el tiempo asignado.
La velocidad de transferencia de datos es controlada por el dispositivo más lento conectado al bus, de ahí la dificultad de estimar el flujo de transmisión de datos en el bus IEEE-488, ya que depende de los dispositivos conectados.
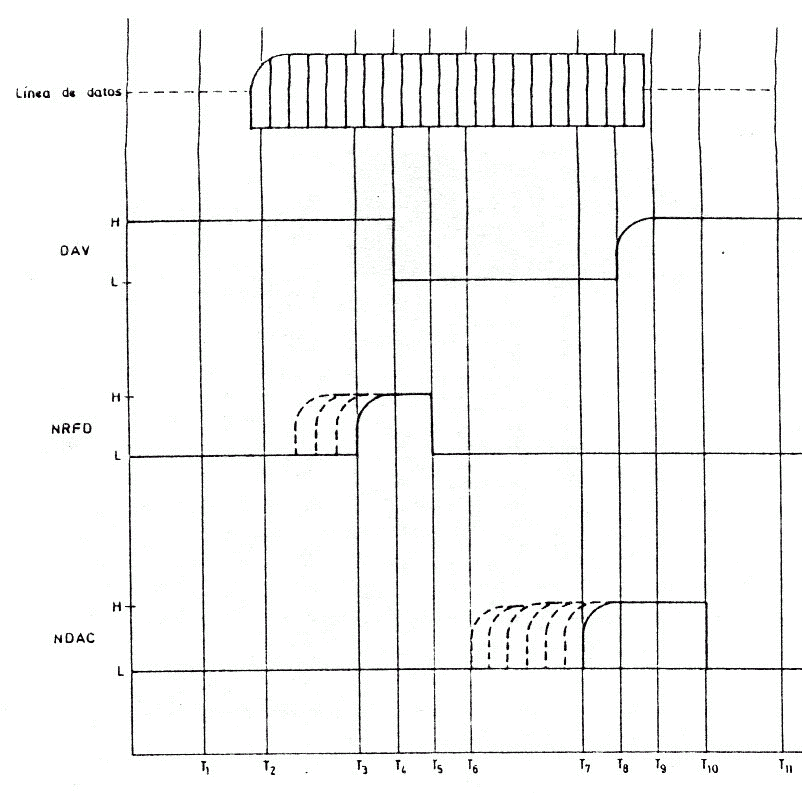
(Fig.3.) Diagrama de tiempos del proceso de handshake
3.7. Líneas de gestión del interfaz
Las cinco líneas de gestión del interfaz (ATN, EOI, IFC, REN, SRQ) controlan el flujo de las señales de control y datos a través del interfaz.
La señal ATN (Attention, Atención) es activada por el controlador para indicar que está colocando un byte de dirección, de control o de datos en el bus. La ATN es liberada para permitir que el transmisor seleccionado ponga sus datos en el bus. El controlador recupera el control reactivando la línea ATN; esto se suele hacer sincronizadamente con el handshake para evitar las confusiones entre los bytes de control y los de datos.
La señal EOI (End or Identify, Fin o Identificación) tiene dos funciones. Un transmisor podría activar EOI al mismo tiempo que el último byte de datos para indicar el final de los datos. El controlador podría activar EOI junto con ATN para iniciar un sondeo en paralelo. Como quiera que mucho dispositivos no usan la sondeo en paralelo, todos los dispositivos deberían usar la señal de EOI para indicar el fin de la transmisión (esto es posible en la mayoría de los instrumentos).
La señal de IFC (Interfaz Clear, Borrado del interfaz) es activada sólo por el controlador del sistema para colocar los interfaces de todos los dispositivos en un estado conocido. Después de recuperar el IFC, el controlador del sistema pasa a ser el controlador activo.
La señal REN (Remote Enable) es activada únicamente por el controlador del sistema. Su activación no coloca a los dispositivos en el modo de control remoto; la señal REN sólo habilita el paso a modo remoto de cierto dispositivo direccionado como receptor. Cuando un dispositivo está funcionando en modo remoto, debe ignorar las órdenes que reciba a través de su panel de control.
La línea de SRQ (Service Request, Solicitud de servicio) funciona como un interruptor: puede ser actuada por cualquier dispositivo para solicitar el acceso al controlador y así realizar cualquier acción. El controlador debe averiguar que dispositivo es el que ha realizado la SRQ, para lo cual utiliza una sondeo en serie. El dispositivo que hace la solicitud libera la línea de SRQ.
3.8. Direccionamiento de los dispositivos
El estándar IEEE-488 permite la interconexión de 15 dispositivos a través de un único bus. Cada dispositivo tiene asignada una única dirección primaria, (comprendida entre la 0 y la 30), por medio de la actuación de los interruptores de direccionamiento de los que dispone el dispositivo (ver Fig.2.). También es posible hacer un direccionamiento secundario, desde la dirección 0 a la 30, para lo cual es recomendable dirigirse a la documentación que ofrece el fabricante del dispositivo, que podrá darnos más información sobre como direccionar el dispositivo, con la dirección primaria obligatoria o con la secundaria opcional.
3.9. Características físicas
Con éste estándar es posible interconectar dispositivos utilizando la conexión en línea, en estrella o una combinación de ambas, usando un conductor blindado de 24 terminales (conector de tipo americano) o de 25 terminales (conector europeo). El conductor definido por el estándar IEEE-488 posee un conector macho en un extremo y uno hembra en el otro. Este conector es el Amphenol CHAMP o Cinch Series 57 del tipo MICRO RIBBON . También están disponibles adaptadores especiales y cables no estándar para satisfacer las necesidades de interconexión en aplicaciones especiales.
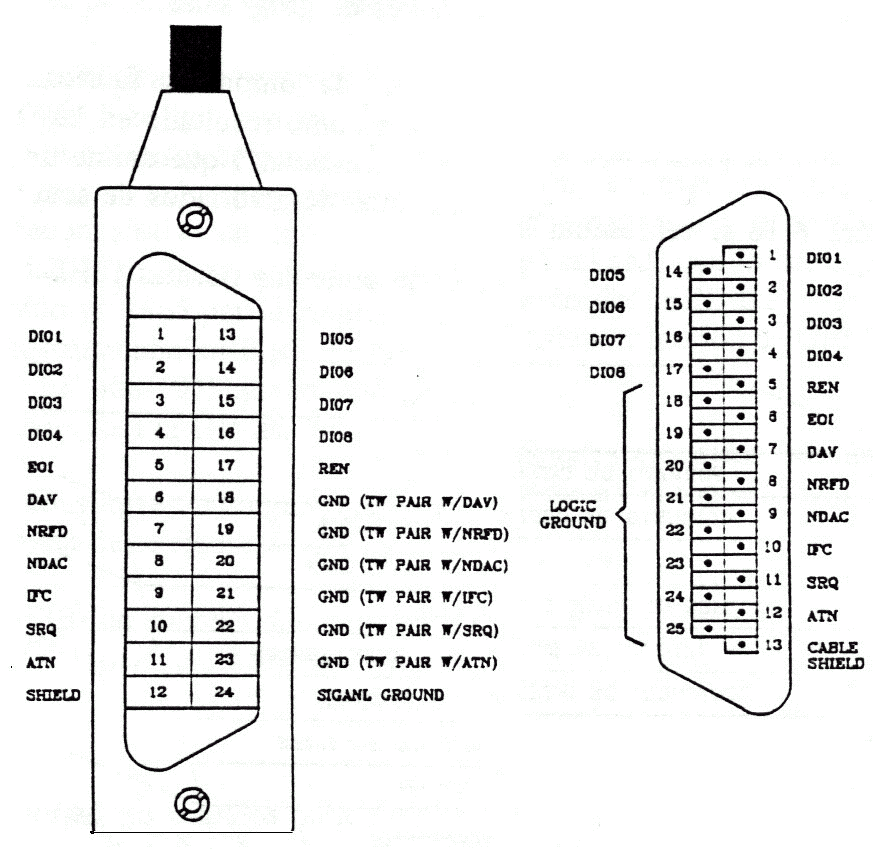
En los instrumentos, estos conectores son hembras.
Fig.4.) Izqda. Conector GPIB americano (IEEE 488, 24 terminales) y asignación de las señales (hembra).Dcha. Conector GPIB europeo (IEC 625.1, 25 terminales) y asignación de las señales.

Fig.5.) Cable definido por el estándar IEEE 488, cortesía de HAMEG
3.10. Extensión del bus
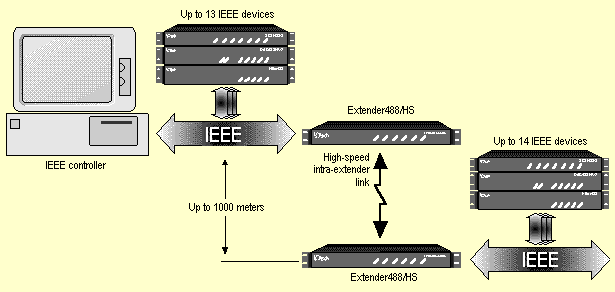
El estándar IEEE-488 especifica una longitud total máxima del cable de 20 metros con no más de 20 dispositivos conectados al bus y al menos los 2/3 de éstos en funcionamiento, para así garantizar la velocidad de 1Mbyte/s garantizada por el estándar. Existe una separación máxima de 4 metros entre dispositivos y una separación media de 2 metros entre dispositivos. Existen expansores y extensores del bus pensados para aquellas aplicaciones que necesiten sobrepasar estas limitaciones (estos dispositivos permiten cubrir distancias de hasta 1 Km).
Su acción se basa en la conversión de los datos paralelo en datos serie, pasándolos de nuevo a formato paralelo en el otro extremo del conductor. Para el usuario son completamente transparentes, es decir, ocupan una plaza en el bus pero no debe preocuparse de direccionarlos como dispositivos. Lógicamente, no permiten aumentar la capacidad de direccionamiento, que sigue limitada a 31 dispositivos. Se pueden conectar tanto en estrella como en serie.

(Fig.6.) Aspecto físico de un extensor del bus, cortesía de Iotech
| 3.11. Características eléctricas El bus utiliza los niveles estándar para la lógica negativa de la familia TTL. Cuando por ejemplo s activa la línea NRFD en ella tenemos un nivel bajo TTL(< 0,8V), y cuando la NRFD está desactivada, estará a nivel alto TTL (>2,0 V). Hay dos tipos de emisores: con colector abierto y tri-state. Deben ser del primer tipo los de las líneas SRQ, NRFD, NDAC, y también las de datos, DIO 1-8, si hay posibilidad de llamada en paralelo. Pueden ser de colector abierto o tri-state: ATN, IFC, REN, EOI, DAV y DIO 1-8 (si no hay posibilidad de llamada paralelo). Con emisores tri-state, la velocidad de comunicación es mayor. En cuanto a las corrientes, los emisores deben aceptar, a nivel bajo, una corriente de entrada de 48 mA continuamente, tanto si son tri-state como de colector abierto. A nivel alto, deben suministrar una corriente de 5,2 mA, si son tri-state. Para los de colector abierto, este valor depende de la carga por lo que nos referimos al apartado 3.5.3. de la norma que especifica estas condiciones. Para los receptores se prefieren los de tipo Schmitt (o equivalentes), con un ciclo de histéresis de 0,4V. Además de las 16 líneas de señal, hay otras 8 de puesta a masa. Hay un par trenzado para cada una de las 3 del handshake, y para IFC, SRQ, ATN. Además hay una línea de masa analógica y otra digital. Las resistencias de cada una de estas líneas y las capacidades del cable también están especificadas. 3.12. Resumen El estándar IEEE-488.1 simplifica enormemente la interconexión de instrumentos programables, ya que define claramente todas las especificaciones, tanto mecánicas, de hardware o eléctricas. Por primera vez, instrumentos de distintos fabricantes pueden conectarse empleando un cable estándar. Este estándar no dice nada acerca del formato de los datos, ni de la información de los estados, ni acerca del protocolo de intercambio de información, ni de las órdenes comunes de configuración, o sobre las órdenes específicas del dispositivo empleado. El estándar IEEE-488.2 aumenta y mejora a su predecesor, especificando el formato de los datos, la información de los estados, la gestión de errores, la funcionalidad del controlador, y las órdenes comunes de los instrumentos. Se centra principalmente en dos cuestiones: el protocolo que debe seguir el software y en mantener la compatibilidad con el hardware fabricado según el estándar IEEE-488.1. El objetivo del estándar IEEE-488.2 es lograr sistemas que sean aún más compatibles y fiables. 4. Otros sistemas de interconexión El estándar IEEE 488 no es el único existente en lo que a la interconexión de los instrumentos de medida se refiere. Como muestra hacemos aquí una breve descripción de un sistema alternativo, la conexión normalizada VXI. 4.1. CONEXIÓN NORMALIZADA VXI 4.1.1. Introducción La conexión normalizada IEEE 488 implica la existencia de un sistema físico que convierte la información presente en la barra del microcomputador en la adecuada para establecer el protocolo de comunicación entre instrumentos. La búsqueda de un sistema de medida automatizado de prestaciones superiores provocó la formación en 1987 de un consorcio de fabricantes para desarrollar instrumentos virtuales conectables a una barra normalizada del computador. El resultado fue la norma VXI (VME bus eXtension for Instrumentation). VXI adoptó la estructura de mensajes de la conexión IEEE 488.2, y los tamaños europeos normalizados para las tarjetas de los instrumentos modulares. 4.1.2. Especificaciones mecánicas y de potencia Se presenta de cuatro tamaño las placas VXI. Donde los conectores son P1, P2 y P3; físicamente idénticos y están formados por 96 contactos repartidos en tres columnas de 32 patillas o terminales. Con estas opciones se pretende abarcar instrumentos modulares de distintas capacidades. Un sistema de medidas VXI puede constar de varios subsistemas VXI. Estos subsistemas están formados por un bastidor que contiene un máximo de 13 ranuras (slots) en cada uno de los cuales se puede colocar una placa de los tipos mencionados anteriormente. Una ranura está destinada la módulo de control del subsistema, y las 12 restantes se dedican a los instrumentos modulares. Además cada bastidor incorpora un máximo de 7 fuentes de alimentación reguladas, que están dimensionadas para proporcionar un máximo de 268 w, de potencia a cada módulo que tenga los tres tipos de conector. 4.1.3. Señales de la barra VXI Para facilitar la compresión de las señales de la barra VXI, se la divide en 8 conjuntos de señales que constituyen otras tantas de menor entidad. La mitad de ellas reciben la denominación de generales: - Barra VME. - Barra de disparo. - Barra de suma lógica. - Barra de potencia. Y las otras 4 recibe el nombre de particulares: - Barra de reloj y sincronización. - Barra de identificación. - Barra de conexión estrella. - Barra local. 4.1.3.1. Barras generales a) Barra VME. Las señales del conector P1 y las de la columna central de P2 constituyen la barra VME, que es la que proporciona las señales básicas de control de un subsistema VXI elemental y está formada a su vez por las barras de transferencia de datos, arbitraje, prioridad de interrupciones y señales generales. b) Barra de disparo. La barra de disparo permite la comunicación entre módulos realizados con circuitos integrados de tecnología TTL y ECL. Aunque los fabricantes pueden especificar formas de transferencias propias, ambas tecnologías presentan las siguientes definidas en VXI: - Disparo síncrono. - Disparo semisíncrono. - Disparo asíncrono. - Transmisión de reloj. - Transmisión de datos. - Arranque/Parada. c) Barra de suma analógica. La barra de suma analógica está formada por la línea 32 de la columna A del conector P2, y tiene por objeto la generación de formas de onda analógicas complejas a partir de módulos de bajo coste generadores de señales arbitrarias. d) Barra de potencia. La barra VXI está dimensionada para evitar que los instrumentos modulares tengan que incorporar fuentes de alimentación y aprovechar así mejor la superficie y volumen de los módulos. 4.1.3.2. Barras particulares a) Barra de reloj y sincronización. La barra de reloj y sincronización contiene las señales CLK 10 (+ y - en el conector P2) y CLK 100 y SINC 100 (+ y - en el conector P3) y está relacionada con la barra de disparo. b) Barra de identificación. Está formada por un conjunto de líneas MODID 1-12, generadas por el módulo 0 (conector P2), cada una de las cuales proporciona una línea de identificación a cada uno de los módulos 1a 12. Se elimina así la necesidad de que los módulos incorporen un mecanismo de selección y se dota al sistema VXI de capacidad de autoconfiguración sin utilizar conmutadores. c) Barra de conexión estrella. Permite hacer una estrella física entre los 12 módulos de un subsistema VXI con el módulo 0 (slot) en su centro. d) Barra local. Está diseñada para comunicar entre sí módulos adyacentes en tiempo real, sin necesidad de utilizar las barras generales de comunicación. Esta barra permite suprimir cables exteriores (jumpers) entre los módulos y proporciona al mismo tiempo una estructura flexible de conexión entre dispositivos de aplicaciones específicas. Como resumen se indican seguidamente las funciones que realizan los terminales de los conectores P1, P2 y P3: CONECTOR P1 (Barra VME): - Barra de datos de 16 bits. - Barra de direcciones de 16 Mbytes. - Barra de arbitraje. - Barra de prioridad de interrupciones (7 líneas). - Barra de señales generales (5V, 12V y -12V). CONECTOR P2: a) Columna central (Ampliación barra VME). - Barra de datos de 32 bits. - Barra de direcciones de 4 Gbytes. b) Columnas externas. - Barra de disparo (8 líneas TTL y 2 ECL). - Barra de suma analógica (1 línea). - Barra de potencia (-2V, 5V, -5,2V, 24V y -24V). - Barra de reloj y de sincronización (10 MHz). - Barra local (24 líneas: 12 a la derecha y 12 a la izquierda). CONECTOR P3: - Barra de disparo (4 líneas ECL). - Barra de potencia (-2V, 5V, -5,2V, 12V, -12V, 24V y -24V). - Barra de reloj y de sincronización (100 MHz). - Barra de conexión estrella (52 líneas ECL). - Barra local (48 líneas: 24 a la derecha y 24 a la izquierda). 4.1.4. Dispositivos conectables a la barra VXI y sus configuraciones. Un dispositivo es uno o más módulos que constituyen un instrumento. Un sistema VXI puede contener un máximo de 256 dispositivos. Dispone de 64 bytes de memoria que se asignan a cada dispositivo se reparten entre 3 tipos de registros: - Configuración (4): Contiene la información necesaria para la configuración y arranque de un subsistema VXI compatible. - Comunicación (8): Proporcionan la capacidad de intercambio de mensajes entre dispositivos mediante la utilización de órdenes y protocolos definidos. - Específicos (52): Son especificados por el fabricante del dispositivo. Estos registros son la base física sobre la que se construye toda la programación del módulo en un sistema VXI. De acuerdo con la forma de realizar la comunicación los dispositivos pueden ser de 4 tipos: - Basados en mensajes: Intercambian información mediante protocolos de comunicación definidos (p. e. IEEE 488.2) y conllevan una mayor complejidad física, al mismo tiempo que facilitan la programación del subsistema VXI. - Basados en registros: Son físicamente más sencillos, y la comunicación se establece al más bajo nivel (binario) lo que complica su programación. - Memorias: Son los de almacenamiento de información del subsistema VXI y pueden estar constituidos por diferentes tipos de memoria. - Extendidos: Corresponden a tipos de instrumentos hechos a la medida para una aplicación particular. La jerarquía entre dispositivos con sistemas VXI se establece según la relación principal - subordinado. Esta jerarquía proporciona la flexibilidad necesaria para controlar instrumentos modulares, ya que las configuraciones de instrumentos se pueden adaptar a las necesidades de aplicación. Los subsistemas están formados por conjuntos de 13 módulos físicos agrupados en un bastidor que le suministra energía eléctrica y refrigeración. El módulo de la ranura cero o módulo 0 (slot 0) es el encargado de generar y distribuir ciertas señales de las barras particulares del subsistema, para lo cual según el tamaño de los módulos posee algunas líneas especiales, y sus funciones más típicas son: - Generación de impulsos de reloj de 10 MHz (conector P2) y 100 MHz (conector P3) de la barra de reloj y sincronización. - Conexión de módulos (conector P2) a la barra de identificación. - Conmutador de la barra de conexión estrella (conector P3). Junto al módulo 0, la norma VXI define un programa de control para el subsistema, denominado gestor de recursos, que realiza entre otras las siguientes funciones básicas: - Identifica cada dispositivo conectado y configura los recursos que necesita (registros de configuración). - Realiza las secuencias de prueba (test) y diagnóstico del subsistema. - Establece el mapa de direcciones del subsistema (registros de dispositivos). - Define las jerarquías principal - subordinado entre los dispositivos. - Determina el esquema de prioridades de la barra VME (barra de prioridad de interrupción). - Inicializa el subsistema. La configuración de sistemas automáticos de medida basados en instrumentos modulares VXI, admite una gran flexibilidad ya que el controlador que posee el programa gestor de recursos VXI y los programas de aplicación puede estar incorporado o no a la barra VXI. 4.2 Tendencias actuales Gracias a nuestra pequeña investigación en Internet, hemos sabido de la existencia de un nuevo estándar ideado para sustituir al IEEE 488 (el HS-488) y de toda la polémica que éste ha suscitado entre los profesionales de todas las especialidades implicadas. Como muestra, incluimos la traducción de una página web en la que se analizan las ventajas y los inconvenientes de este nuevo estándar. "La controversia del estándar IEEE-488" |
¿Cuáles son los pros y los contras del nuevo HS 488?
Por el Dr. Philip J. Fleming, PhD
El reciente y breve debate público acerca de la propuesta de cambiar al conocido estándar IEEE-488.1 no ha aportado la información técnica de calidad que necesitan los ingenieros que actualmente usan este estándar. Contrariamente a lo que reflejan gran número de comentarios que he leído en publicaciones recientes, las causas que originaron este debate se remontan en el tiempo más de 6 años, hasta al menos el año 1992 y obviamente aún no han sido resueltas.
º Introducción
La buena práctica de la ingeniería siempre ha requerido un riguroso proceso de planteamiento de cuestiones y su resolución en el comienzo del desarrollo de cualquier aplicación a fin de determinar los beneficios e inconveniencias que trae consigo cualquier nueva tecnología o proceso. En concreto, cabría preguntarse:
1.¿Cuáles son las características o propiedades que conozco de este método que son importantes para mi aplicación?
2. ¿En qué se diferencia de aquello con lo que ya estoy habituado a trabajar?
3. ¿Cuáles son los posibles riesgos y/o consecuencias adversas que resultarían de utilizar esta nueva tecnología en mi aplicación?
¿Cómo podrían beneficiarse mis productos, mis clientes, mi empresa, y mi carrera de esta decisión?
Aplicando este cuestionario al HS-488, y analizando algunas de las características claves del existente IEEE-488.1 y de la nueva propuesta, el "HS-488", podemos destacar:
Análisis
Una vez confeccionada una tabla con aquellas características que podrían condicionar nuestra elección de los métodos para manipular información que nos ofrece el bus 488 (GPIB), aquellas cuestiones con respuestas comunes o parecidas pueden eliminarse ya que lo que nos interesa es el resto de los elementos.
Entre las virtudes del HS-488 vemos que usa los mismos cables y conectores que el GPIB usa habitualmente. El método de circulación de los datos está pensado para conseguir la transferencia de gran cantidad de información. El flujo máximo de transmisión de datos es casi 8 veces más rápido que el del 488.1, pero tendremos que examinar esto con más detenimiento. Hay un método para gestionar aquellos dispositivos conectados al bus pero que no cumplen las especificaciones del HS-488, aunque su rendimiento no puede beneficiarse del uso de un controlador HS.
Sin embargo, en el otro lado de la balanza aparecen tres elementos de la lista mostrada algo más arriba que resultan muy importantes y son potenciales causas de graves problemas:
1. El primer problema se debe al "CFE". Pero, ¿qué es el CFE? El CFE es una nueva orden (Configuration Enable, Configuración habilitada) que el controlador "HS" añade al controlador del bus GPIB. Esta orden no está direccionada, lo que significa que es enviada al mismo tiempo a todos los dispositivos conectados al bus GPIB, para informarles de la configuración de cableado que ha sido programada. Si revisamos las especificaciones del estándar IEEE-488.1, nos encontramos con que por razones de compatibilidad de sistemas, no se permite la introducción de una orden de este tipo. Es más, esto implica que los diseñadores para el 488 deben tratar las señales de la misma forma, por ejemplo: los mensajes de error para apagar el sistema. Esto hace imposible garantizar una perfecta comunicación con otros dispositivos 488.1 que podrían estar activos en el mismo bus GPIB.
2. La longitud del cable está directamente relacionada con la velocidad de transferencia de la información. En las especificaciones del estándar IEEE-488.1, podemos ver que el Settling Time (Tiempo de establecimiento) T1 y el Data Valid Time (Tiempo de validación de datos) T2 vienen dados para el peor caso de la longitud del cable (15 m) y con 15 dispositivos activos. Por lo tanto, la transferencia de datos a 1 MByte/s está completamente garantizada para la mayoría de configuraciones del cableado. La solución "HS", por contra, no es tan fácil de entender. En realidad, se especifican 6 longitudes de cable cuya elección debe ser muy cuidadosa.
Un análisis más detallado nos indica claramente que los 8 Mbytes/s que se prometen para el HS-488 se quedan en bastante menos si se quiere usar en aplicaciones complejas en lo referente al cableado. Si lo que se tiene es una aplicación con un único nudo y menos de 2 m de longitud de cable, el método HS parece que verdaderamente da mejor rendimiento. Más allá de los 2 m, hay poca mejora del rendimiento frente a la solución existente del 488.
El tercer factor a considerar es el PRECIO. Puesto que la lógica necesaria para la decodificación del HS es más del doble que para el 488, no hace falta pensar demasiado para darse cuenta de que el controlador HS será más caro que los controladores existentes para el 488. Por una simple regla de tres se llega a la conclusión de que el duplicar la superficie de un chip equivale a cuadruplicar las probabilidades de que aparezcan defectos. Esto conlleva un mayor coste por circuito en funcionamiento, particularmente en aquellos en los que las funciones del tipo de las del 488 están integradas en circuitos mucho más grandes y complejos que implican un incremento de la cantidad de silicio en estado puro necesario (y, por lo tanto, un aumento de precio) totalmente inaceptable y desastroso para el desarrollo de sus productos.
Conclusiones
El análisis aquí realizado es bastante elemental para comprender los matices de implementar virtualmente cualquier tecnología. El uso de esta técnica permite a los ingenieros y a todo aquel que debe tomar una decisión de tipo tecnológico, ver fácilmente más allá de la publicidad y a cuantificar los beneficios o riesgos de cualquier nueva tecnología.
En este caso, la técnica nos muestra que la metodología HS-488 podría utilizarse en una parte de las aplicaciones que actualmente cubre el 488. Sin embargo, la solución HS está claramente limitada a aplicaciones que requieran un gran flujo de datos en longitudes cortas (menos de 2 m) de cable. Para el resto de las aplicaciones que usan el bus 488 pero no precisan este gran flujo de datos, el método HS no ofrece ningún beneficio en absoluto. A decir verdad, en vista de los problemas e inconvenientes descritos con anterioridad, creemos que es muy arriesgado y supone un serio inconveniente para la abrumadora mayoría de las aplicaciones con el 488 que requieren la transmisión de pequeños paquetes de datos, más nudos operativos, y cableados más largos. Basándonos en este análisis, no recomendaríamos la adopción del HS-488 como un nuevo estándar IEEE.
Descargar
| Enviado por: | Kary |
| Idioma: | castellano |
| País: | Venezuela |
Todos los derechos reservados.