Industria y Materiales
Mecánica: control de velocidad con PLL (Phase-Locked Loop)
18 .- En que tipo de control se puede obtener una velocidad sobre la básica en un motor de cc.-
R: En un control de campo y con un PLL
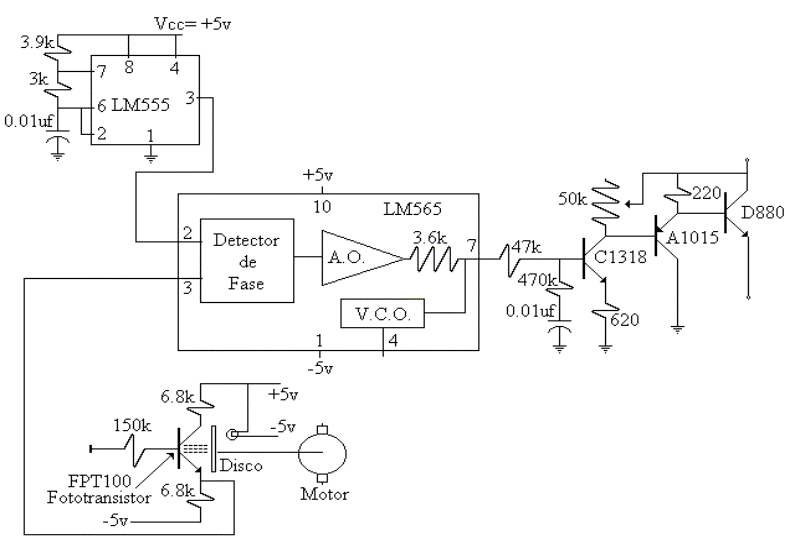
CONTROL DE VELOCIDAD DE UN
MOTOR D.C. CON PLL.
COMO FUNCIONA UN PLL
La frecuencia de oscilación del VCO, Fo, se compara con la frecuencia de la señal de entrada Fi, en el detector de fase. La salida del detector de fase es la señal de error que produce un voltaje DC proporcional a la diferencia en frecuencia (Fi - Fo) y la diferencia en fase Að.
La señal de error se filtra (para eliminar ruidos), amplifica y se aplica al VCO. La señal de error hace que la frecuencia Fo del VCO cambie en una dirección tal que se reduzca la diferencia en frecuencia (Fi - Fo).
Cuando la frecuencia del VCO empieza a cambiar, el lazo esta en el estado de captura (El rango de captura siempre es menor que el rango de enclavamiento). Este proceso continua hasta que la frecuencia Fi y Fo son exactamente iguales. En este momento, el lazo esta sincronizado o enclavado.
Durante la fase de enclavamiento la frecuencia en la señal de entrada Fi y la frecuencia del VCO, Fo, son idénticas excepto por una diferencia de fase. Esta diferencia de fase se requiere para generar la señal de error necesaria que produce el cambio en la frecuencia Fo del VCO y mantiene el lazo en la fase de enclavamiento.
Esta acción repetitiva permite que cualquier cambio en la frecuencia de la señal de entrada sea seguida por la frecuencia Fo del VCO durante la fase de enclavamiento. Es de anotar que el rango de captura y de enclavamiento de un PLL se especifican generalmente como un porcentaje de la frecuencia central de operación del VCO.
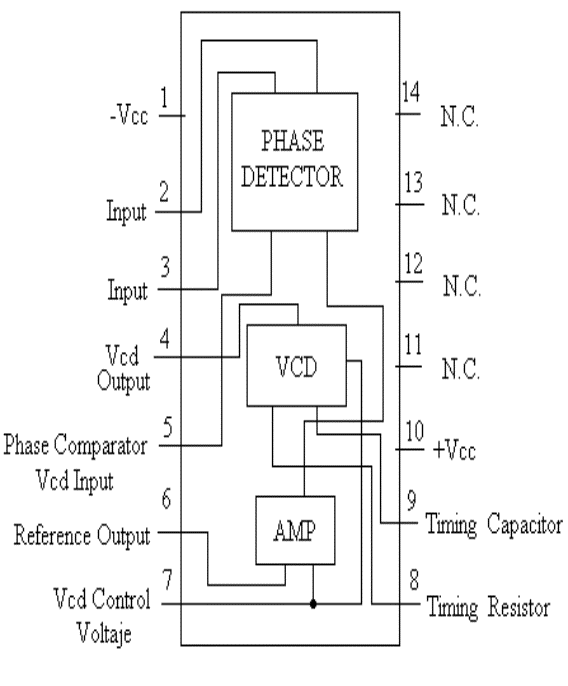
DIAGRAMA FUNCIONAL DE UN PLL

Entrada Fi Salida Fo
El sistema de control de velocidad para un motor DC, utilizando un PLL es compatible con sistemas de control digitales, que pueden ser adicionados para permitir mayor precisión.
2. El principio de control de velocidad utilizando un PLL, puede extenderse a sistemas de motores trifasicos de alta potencia, u otros circuitos controladores de fase.
3. Como controlador de fase, se puede aplicar en ambientes industriales donde las fuentes de alimentación tienen un gran contenido de armónicos, ocasionando distorsiones y afectando el desempeño en algunos procesos.
4. Hay dos factores fundamentales en el diseño de un PLL :
ð Ganancia de lazo : Esto afecta el error de fase entre la señal entrada y el VCO, para una frecuencia dada transferida de la señal de entrada; afectando el rango de enclavamiento de el lazo.
ð Frecuencia Natural : El ancho de banda del filtro es determinado por los componentes del filtro R1, R2 (si la tiene) y C; que se determina de acuerdo a su utilización especifica. Por ejemplo, si se desea bajar la sensibilidad al ruido o si es para eliminar los errores por transientes, ya que estos principios están en oposición directa.
. Los PLL proporcionan una gran ventaja sobre los elementos discretos, ya que reducen notablemente el numero de elementos que se necesitan para el montaje y dejan trabajar en un ámbito digital, lo cual proporciona ventajas para la utilización de diversas herramientas, entre ellas el computador. Con los PLL el numero de variables a ser tenidas en cuenta se reduce, lo cual simplifica matemáticamente los circuitos en que aparece.
Descargar
| Enviado por: | Dracon |
| Idioma: | castellano |
| País: | Chile |
Todos los derechos reservados.