Electrónica, Electricidad y Sonido
Electrotecnia
PARCIAL N° 1
PROBLEMA DE DISEÑO
Problema de diseño
La siguiente figura ilustra un esquema elemental de encendido de un automóvil. Suponiendo que una operación óptima de arranque requiere una respuesta sobreamortiguada para iL(t) que alcanza por lo menos 1A en 100ms después de la conexión y permanece arriba de 0.5A entre 1s y 1.5s. Encontrar el valor de C y verificar el diseño.
Esquema Circuital
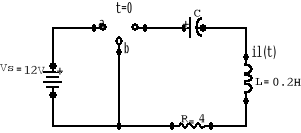
Figura N°1
Desarrollo
Para el desarrollo de este problema, se procedió como sigue:
El sistema se lo analizó teniendo en cuenta que el interruptor del circuito mostrado en la figura N°1, ha estado en la posición a durante mucho tiempo. En t=0, el interruptor pasa súbitamente de la posición a a la posición b, a partir de esto tenemos:
-
Para los t<0: la siguiente configuración circuital
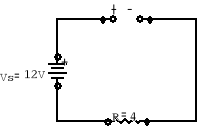
El voltaje del capacitor es Vc=12 V en t=0-. Puesto que el voltaje en t=0+ no puede cambiar, se tiene:
Vc =Vc(0-) = Vc(0+)= 12V
La corriente en esta situación es nula, entonces:
i(t)=iL (0-) = iL (0+)= 0 A
-
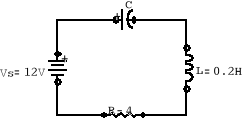
Para los t>0: la configuración circuital es la siguiente:
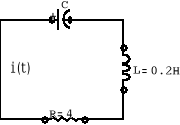
Aplicando la ecuación de malla de Kirchhoff, tenemos :
VR(t) + VL(t) - Vc(t) = 0
![]()
![]()
Derivando la expresión anterior y normalizando, obtenemos:
![]()
Aplicando el operador diferencial ![]()
, nos queda:
![]()
Luego:
![]()
Como i (t) no es nula en todo t, se deberá cumplir que:
![]()
( Ecuación Característica)
De la ecuación característica obtenemos las raíces s1 y s2 que contienen toda la información necesaria para determinar el carácter de la respuesta natural del sistema. Dichas raíces son:
![]()
![]()
Nota: ðd solo esta definida para el caso Subamortiguado. Solo le asignamos este nombre a la raiz cuadrada que se muestra mas arriba para mayor comodidad.
o sea:


Ahora bien, dado que para una operación óptima de arranque, la respuesta i(t) debe ser sobreamortiguada, esto implica que las raíces de la ecuación característica s1 y s2 serán reales y distintas, para que esto ocurra deberá cumplirse que ![]()
, es decir:


Como: L=0,2 H ; R =4 ð, nos queda que el valor de capacidad C deberá ser:
![]()
![]()
C > 0.05F
Teniendo en cuenta lo anterior, la respuesta i(t) tendrá la forma :
![]()
donde:
in(t)= ![]()
es la respuesta natural del sistema en régimen transitorio.
if(t)=0 es la respuesta forzada del sistema en régimen permanente.
Por lo tanto a la corriente i(t), se la puede escribir como:
![]()
Aplicando las condiciones iniciales:
![]()
reemplazado en la expresión de la corriente, nos queda:
![]()
Derivando la expresión anterior y multiplicando por L, particularizada en t=0, determinamos el valor de K1 :
![]()
![]()
Sustituyendo ðd ,L y Vc por sus valores , K1 resulta:

De modo que la corriente i(t) quedara expresada a través de las siguientes ecuaciones, a saber:
![]()
o

Por lo anteriormente desarrollado podemos expresar:
Reemplazando el valor de ðd en las expresiones de ðð y ð2 obtenemos:
Para cumplir la condición de sobreamortiguamiento sabemos que:
0,05 < C < ð
lo que está impuesto por el circuito. Ahora haremos tender a C hacia esos dos extremos y encontraremos el rango de variación de ðð, ð2 y ðd en función de C:
Donde ð=10 s-1 y L=.02H
De aquí deducimos:
0 < ðd <10 s-1
Podríamos continuar haciendo este análisis en función de C, pero siendo que ya hemos expresado ðd como función de esta variable, veamos como varían ðð y ð2 en función del valor encontrado para ðd, lo que nos hará más fácil darnos cuenta de los valores que obtendremos.
En resumen:
0,05 < C < ð ð 0 < ðd < 10;
0,1 < ðð < ðð 0,05 < ðð < 0,1
En primera instancia, se nos ocurriría tantear valores de C, que es la incógnita de nuestro problema hasta encontrar el que cumple las condiciones de diseño para ello partiríamos del mínimo valor de C encontrado. Inmediatamente observamos que siendo que C llega hasta infinito, tantear en base a esta variable podría ser un trabajo muy tedioso e inclusive no llegar a darnos nunca el resultado esperado.
Deducimos entonces que es mas conveniente hacer el tanteo con los valores de ðd o de ðð que están acotados, e íntimamente relacionados con C, que es nuestra incógnita.
Elegimos trabajar con ðð:
Como ðð varía entre 0,05 y 0,1 hacemos la diferencia entre el valor superior y el inferior lo que nos da 0,05. Dividimos este valor entre 10 obteniendo 0,005. Este es el incremento que utilizaremos para hacer el tanteo partiendo de 0,055 hasta 0,095. Estos valores los llevaremos a la expresión de C que se muestra a continuación, en la que hemos expresado a C en función de ððð
Estos valores de C obtenidos luego serán reemplazados en la expresión de i(t) particularizada para cada uno de los tiempos que tenemos que verificar. La misma es mostrada mas abajo, la cual a su vez esta expresada en función de C

y probamos con cada uno de los valores de C encontrados para t = 0,1s ; t = 1s y t = 1,5s.
A continuación mostramos una tabla con los valores encontrados para la primera aproximación.
| ðð | C | i(t=0,1) | i(t=1) | i(t=1,5) | |
| 1 | 0.055 | 0.1512 | 2.462 | 0.594 | 0.239 |
| 2 | 0.06 | 0.090 | 2.374 | 0.160 | 0.030 |
| 3 | 0.065 | 0.0704 | 2.315 | 0.055 | 5.4 x 10-3 |
| 4 | 0.07 | 0.0612 | 2.275 | 0.022 | 1.3 x 10-3 |
| 5 | 0.075 | 0.0562 | 2.248 | 0.011 | 0.4 x 10-3 |
| 6 | 0.08 | 0.0533 | 2.230 | 6.5 x 10-3 | 0.15 x 10-3 |
| 7 | 0.085 | 0.0516 | 2.218 | 4.3 x 10-3 | 72 x 10-6 |
| 8 | 0.09 | 0.0506 | 2.211 | 3.29 x 10-3 | 41 x 10-6 |
| 9 | 0.095 | 0.0501 | 2.208 | 2.81 x 10-3 | 29 x 10-6 |
En la tabla podemos observar que todos los valores cumplen la primer condición (i(t=0,1)>=1A), el primero cumple además la segunda condición (i(t=1) >=0.5A), más ninguno de los valores cumple la tercer condición (i(t=1,5) >=0.5A).
Sin embargo observamos que el valor obtenido en la fila uno es el que menos se aleja de cumplir la condición. Repitiendo el procedimiento explicado y utilizando en este caso el mejor valor de ðð que hemos encontrado (ðððð,ððð) tomaremos el valor anterior y el posterior de acuerdo al incremento que habíamos usado en la primera aproximación, o sea que en este caso variaremos desde 0.050 + ( el nuevo incremento ), hasta 0.060 - ( el nuevo incremento ).
Estos valores extremos serán 0,050 y 0,060, la diferencia entre ellos es 0,01 y este valor dividido entre 10 nos da 0,001 que es el nuevo incremento.
Construimos una nueva tabla.
| ðð | C | i(t=0,1) | i (t=1) | i(t=1,5) | |
| 1 | 0.051 | 0.6502 | 2.563 | 2.109 | 1.734 |
| 2 | 0.052 | 0.3380 | 2.534 | 1.505 | 1.025 |
| 3 | 0.053 | 0.2341 | 2.508 | 1.090 | 0.619 |
| 4 | 0.054 | 0.1822 | 2.484 | 0.800 | 0.381 |
| 5 | 0.055 | 0.1512 | 2.462 | 0.594 | 0.239 |
| 6 | 0.056 | 0.1306 | 2.441 | 0.547 | 0.153 |
| 7 | 0.057 | 0.1160 | 2.422 | 0.341 | 0.099 |
| 8 | 0.058 | 0.1051 | 2.405 | 0.262 | 0.066 |
| 9 | 0.059 | 0.0967 | 2.389 | 0.204 | 0.044 |
Ahora hemos obtenido tres valores que verifican las condiciones de diseño, el más conveniente es el que corresponde a ðð=0,053 seg.
Haciendo las mismas consideraciones que en el caso anterior tomaremos un nuevo segmento con un valor inferior igual a 0,052 y un superior igual a 0,054. Es decir una vez mas hemos achicado el intervalo en el que haremos variar a ðð. El nuevo incremento valdrá 0,0002.
Construimos una nueva tabla.
| ðð | C | i(t=0,1) | i(t=1) | i(t=1,5) | |
| 1 | 0.0522 | 0.3096 | 2.528 | 1.410 | 0.925 |
| 2 | 0.0524 | 0.2860 | 2.523 | 1.321 | 0.835 |
| 3 | 0.0526 | 0.2660 | 2.518 | 1.238 | 0.755 |
| 4 | 0.0528 | 0.2489 | 2.513 | 1.162 | 0.683 |
| 5 | 0.0530 | 0.2341 | 2.508 | 1.090 | 0.619 |
| 6 | 0.0532 | 0.2211 | 2.503 | 1.023 | 0.561 |
| 7 | 0.0534 | 0.2096 | 2.498 | 0.961 | 0.508 |
| 8 | 0.0536 | 0.1995 | 2.493 | 0.904 | 0.462 |
| 9 | 0.0538 | 0.1904 | 2.488 | 0.850 | 0.419 |
En esta tercer tabla observamos que el mejor valor corresponde a un ðð=0,0534 s con un capacitor de 0,2096 F.
En este punto consideramos que el valor de C encontrado tiene una muy buena aproximación por lo que decidimos adoptar a este valor para nuestra incógnita.
Reemplazando este valor de C en la expresión de ðð que se muestra a continuación
obtenemos ðððð,ðððð seg
El valor de ðd será:
Finalmente construimos nuestra respuesta
que verifica las condiciones de diseño.
Verificación
Para verificar el diseño del circuito empleamos el programa matemático MATLAB 6.5, como sigue:
Teniendo en cuenta la ecuación diferencial que describe el comportamiento de circuito, en la cual se ha reemplazado los valores de R, L, C , se tendra:
![]()
Aplicando Laplace:
s2I(s) - s i(0) - i'(0) + 20 s I(s) - 20 i(0) + 23.81 I(s) = 0
s2I(s) - i'(0) + 20 s I(s) + 23.81 I(s) = 0
s2I(s) - 60 + 20 s I(s) + 23.81 I(s) = 0
(s2+ 20 s + 23.81) I(s) = 60 , por lo tanto
I(s) = 60/(s2+ 20 s + 23.81)
>> num=(60);
>> den=[1 20 23.81];
>> tf(num,den)
Transfer function:
60
------------------
s^2 + 20 s + 23.81
![]()
![]()

![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()
Descargar
| Enviado por: | Josu |
| Idioma: | castellano |
| País: | Argentina |
Todos los derechos reservados.